Downloaded 120 times
![ONE DIMENSIONAL WAVE EQUATION
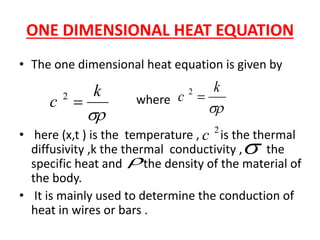
• Where u(x,t) is deflection of string.
The wave equation is mainly used to
determined the motion of vibrating string.
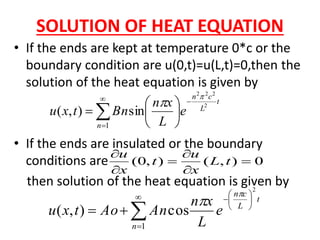
if the initial deflection u(x,0) is f(x) and initial
velocity is g(x),then the solution of wave
equation is given by
L
nx
L
ctn
Bn
L
ctn
Bntxu
n
sin]sin*cos[),(
1
2
2
2
2
2
x
u
c
t
u
)0,(x
t
u
](https://image.slidesharecdn.com/advanceengineringmathematics-160201201212/85/Advance-enginering-mathematics-8-320.jpg)
![We know that,
u(0,t)=u( ,t)=0 for all
u(x,0)=0.01sin3x
We know that the solution of (1) together
with (2) is given by………
Here g(x)=0 so , Bn*=0
…..(3)
0t
x0
L
nx
L
ctn
Bn
L
ctn
Bntxu
n
sin]sin*cos[),(
1
L
ctn
Bntxu
n
cos),(
1
L
nx
sin](https://image.slidesharecdn.com/advanceengineringmathematics-160201201212/85/Advance-enginering-mathematics-12-320.jpg)
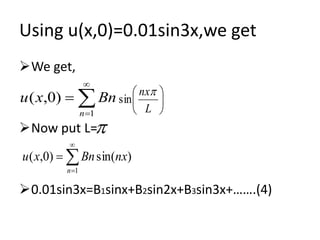



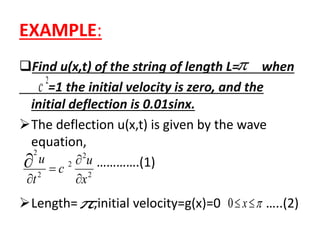
This document discusses partial differential equations and provides examples of solving some common types of PDEs. It covers: - The definition of a partial differential equation as a relationship between a dependent variable and two or more independent variables. - Methods for forming and solving first order linear PDEs using Lagrange's method of grouping or multipliers. - The one-dimensional wave equation and heat equation, and methods for solving them given initial conditions or boundary values. - An example of solving the one-dimensional wave equation for an initial deflection of 0.01sinx.