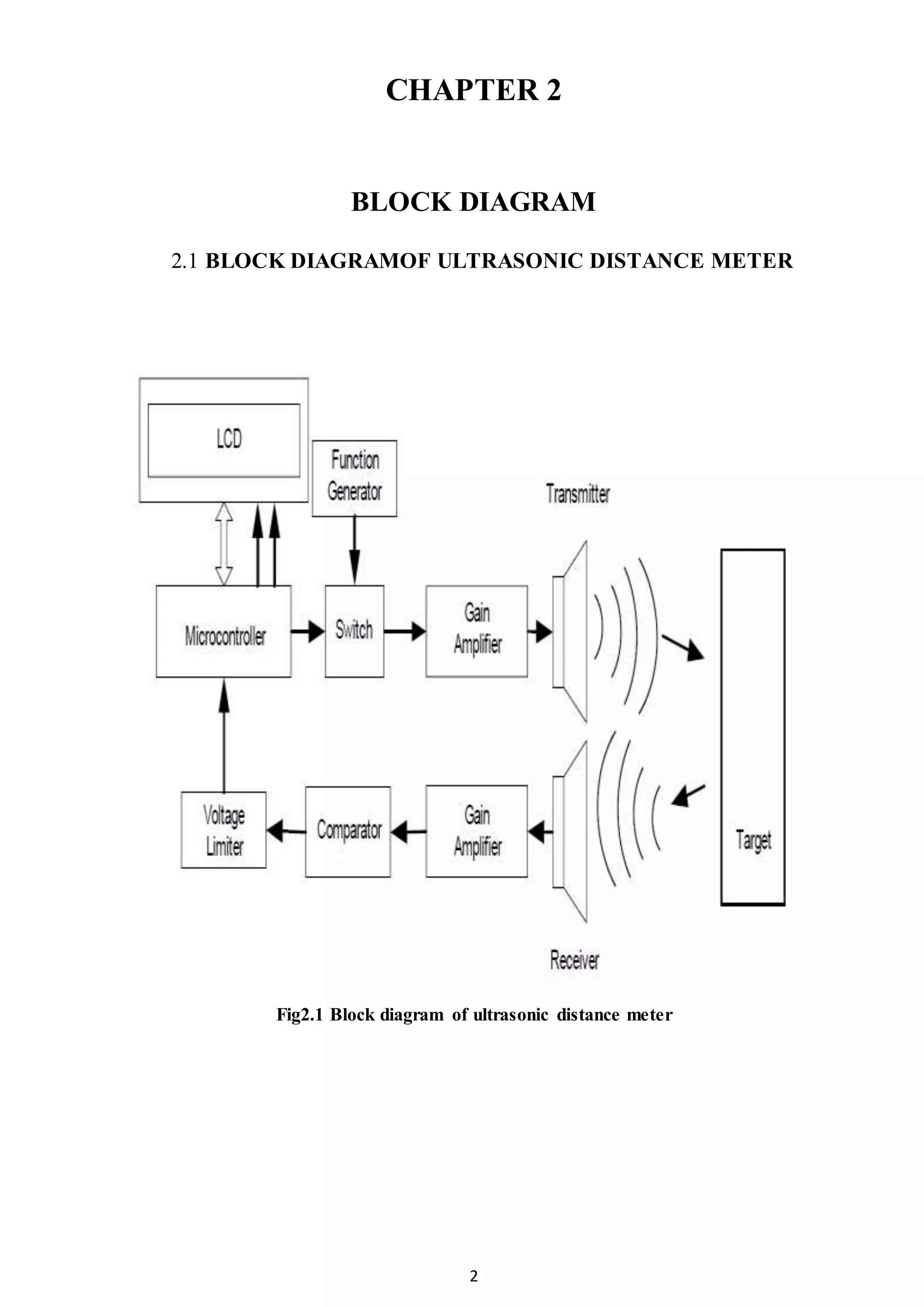
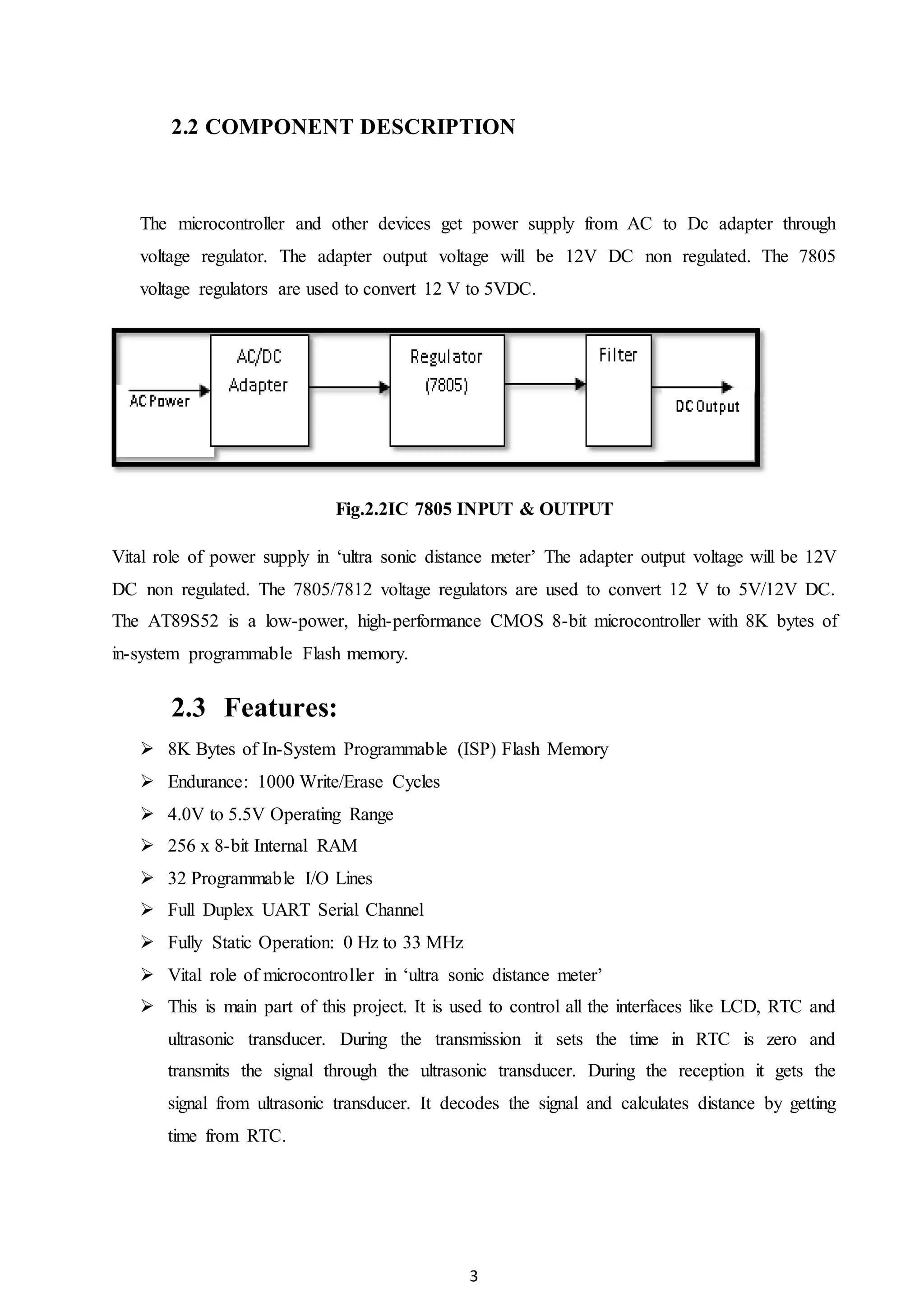
The document describes an ultrasonic distance meter circuit. It consists of a microcontroller that encodes and transmits ultrasonic pulses via a transmitter. When the pulses reflect off an object, a receiver detects the echo and the microcontroller calculates the distance based on the time elapsed. It displays the measured distance on an LCD screen. The circuit uses various components like a voltage regulator, microcontroller, LCD, buzzer, and ultrasonic transducers to transmit pulses, receive echoes, and determine distances to objects.