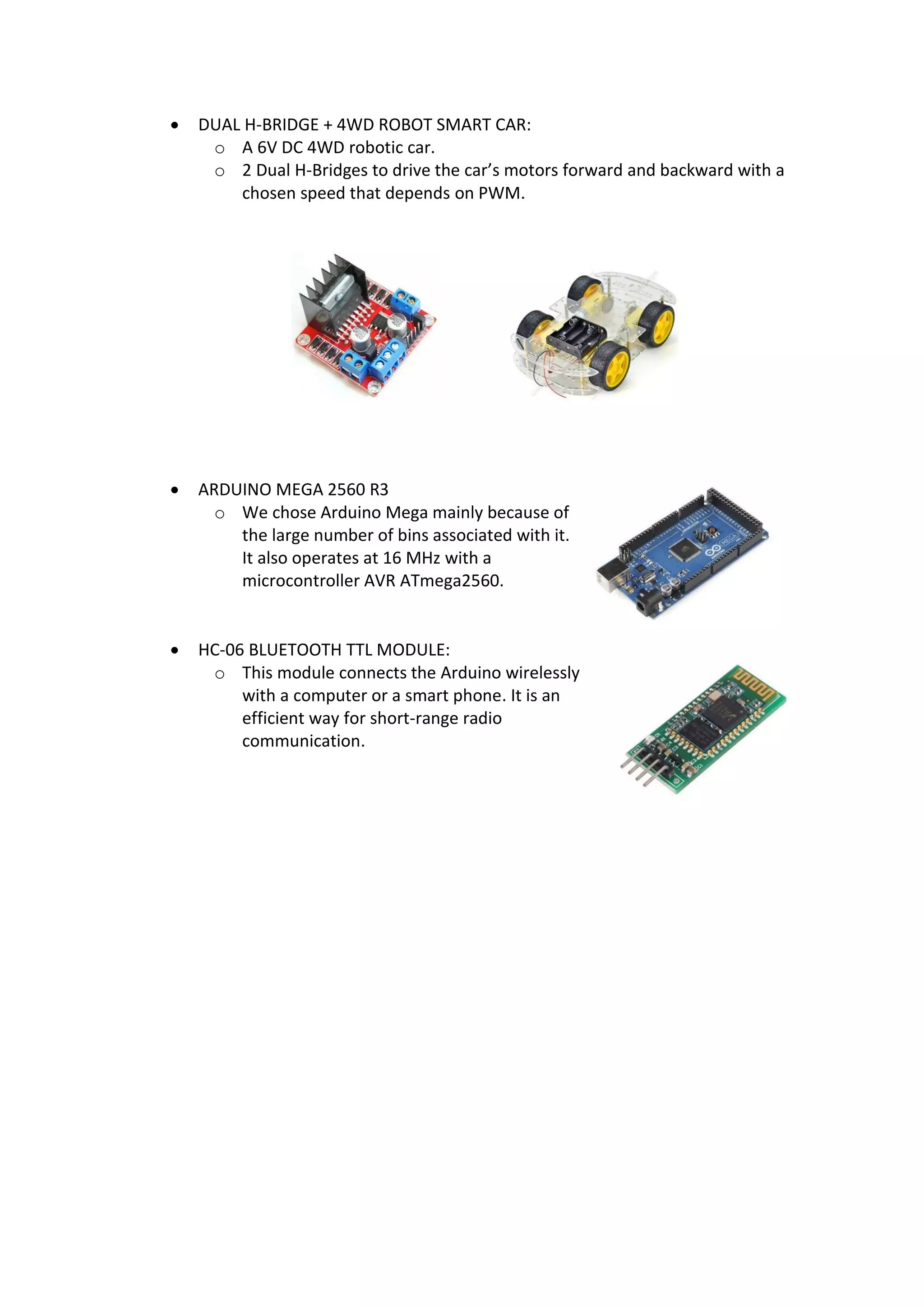
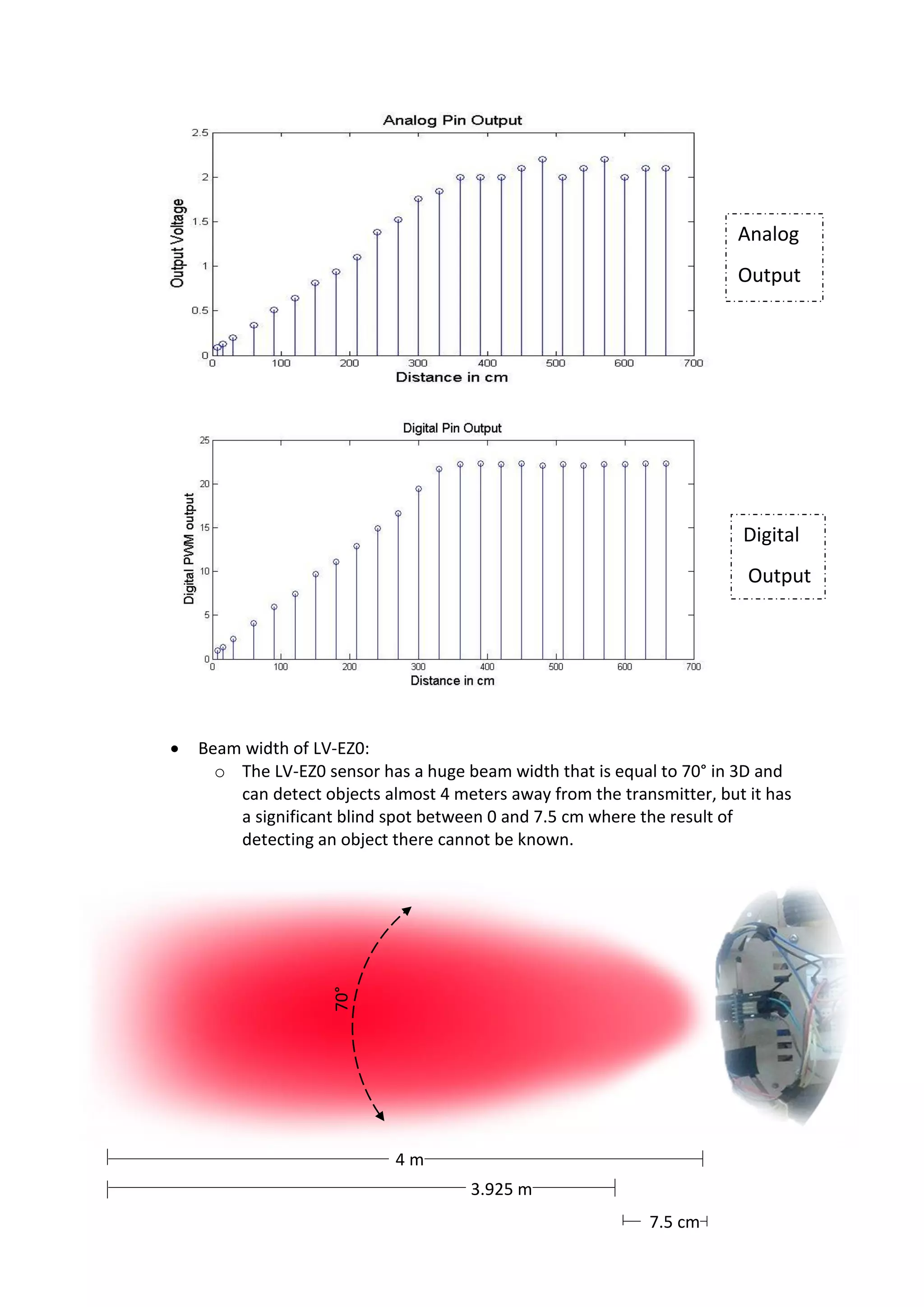
The document describes an automatic braking car system that uses ultrasonic sensors to detect obstacles and prevent collisions. It uses an LV-EZ0 sensor in front to measure distances up to 400cm and trigger braking when objects are less than 80cm away. It uses HC-SR04 sensors on the sides and back to measure distances from 2-400cm and guide maneuvering when the front is blocked. The system controls a 4WD robotic car through an Arduino and Bluetooth to move forward, rotate, or reverse depending on sensor readings to navigate safely around obstacles.