
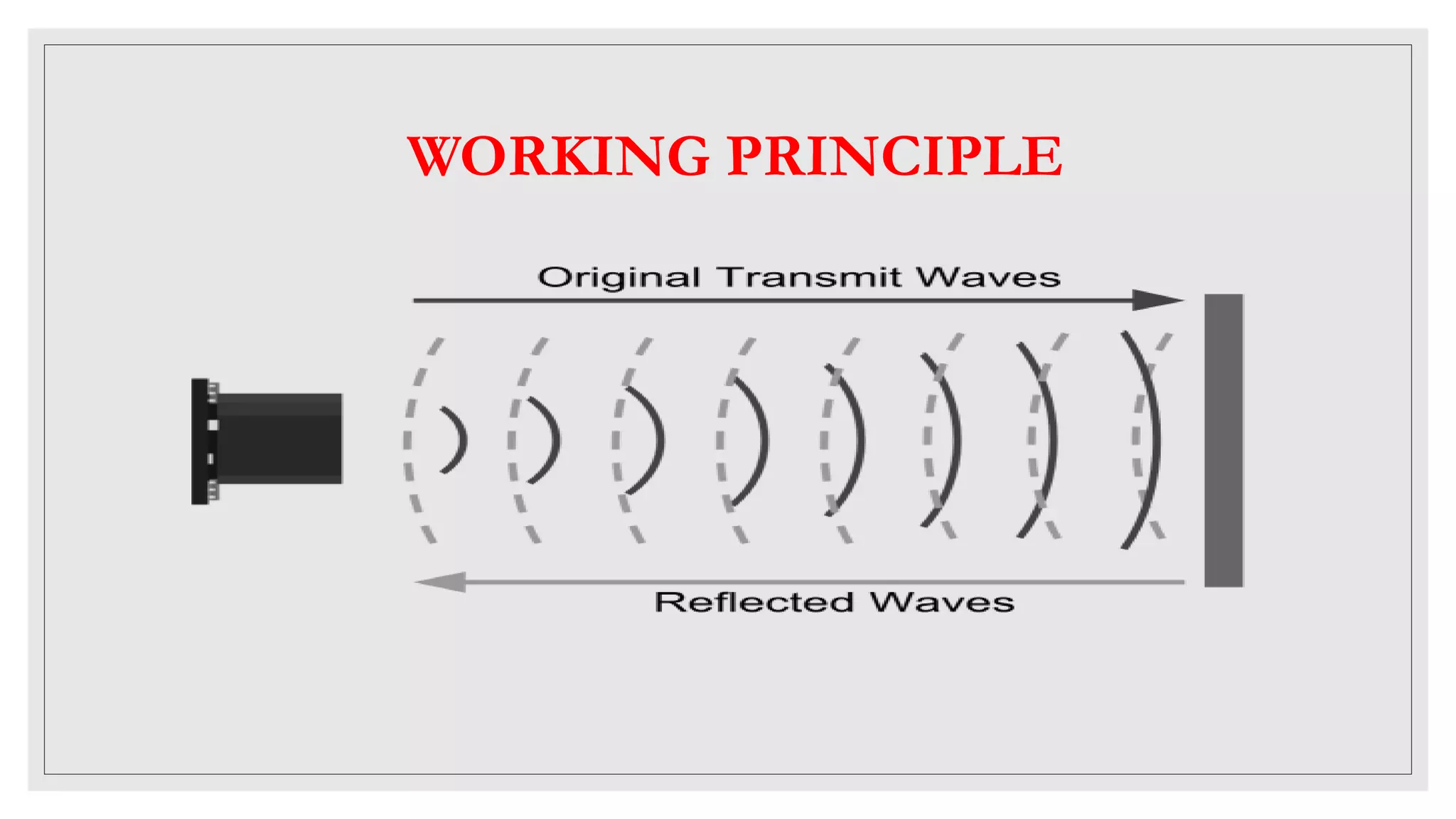


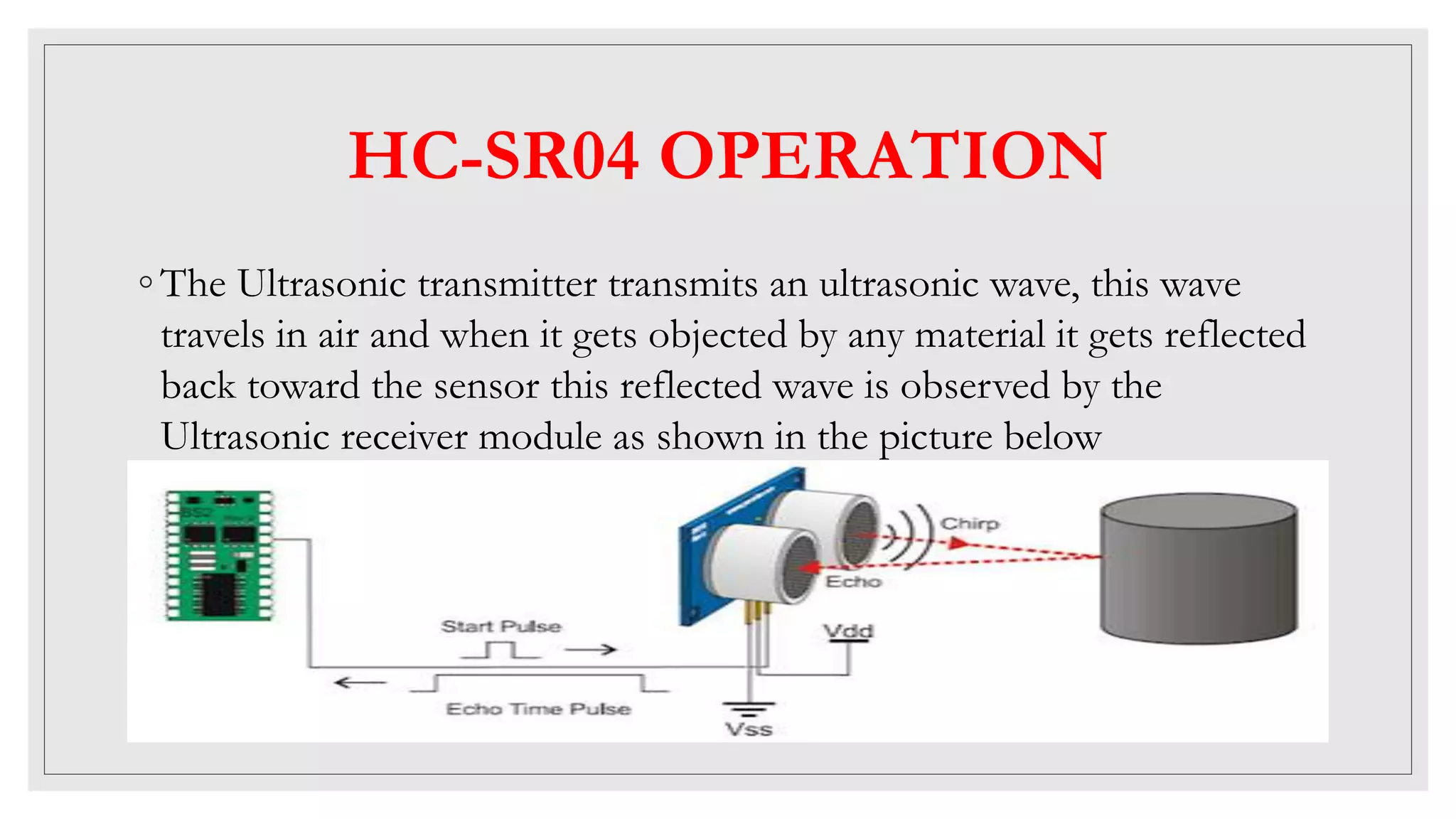






An ultrasonic sensor measures distance by emitting and receiving ultrasonic sound waves, generating electric pulses based on echo timings. The HC-SR04 is a popular ultrasonic sensor with specific pins for power, triggering measurements, and receiving echoes, typically used in various applications like object detection and distance measurement. Its advantages include small size, ease of integration, high sensitivity, and cost-effectiveness.



































































