Download as PDF, PPTX
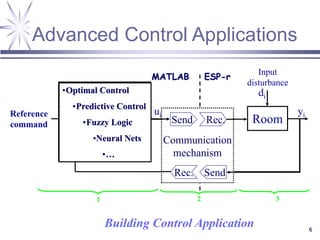
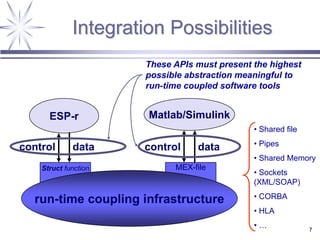
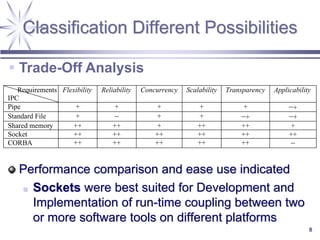
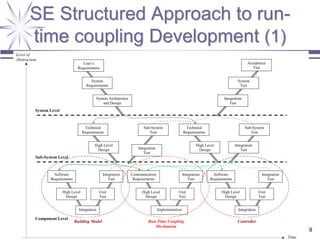
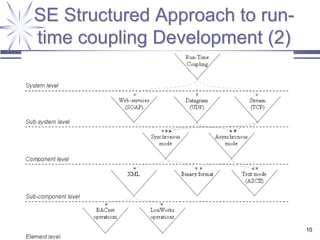
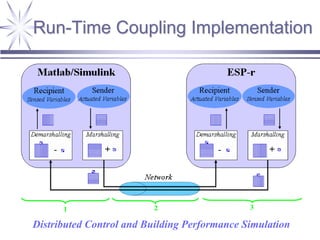
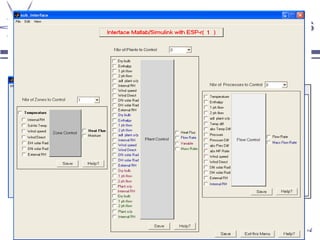

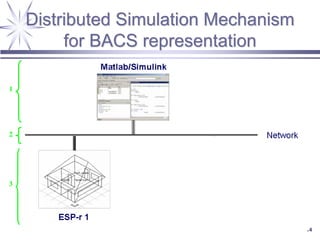
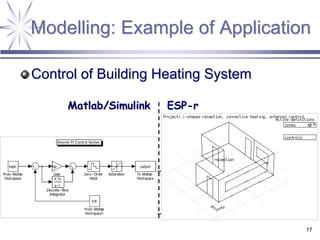
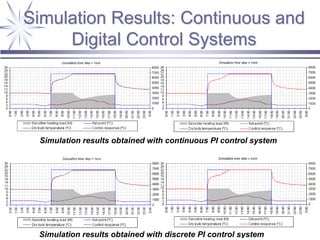

The document discusses a framework for distributed control and performance simulation in building automation systems, specifically integrating MATLAB/Simulink with ESP-R. It outlines the challenges, proposed solutions, and the advantages of a run-time coupling mechanism that facilitates interaction between different simulation platforms. Future work aims to extend this framework for complex, large-scale building control applications.













![[2015/2016] AADL (Architecture Analysis and Design Language)](https://cdn.slidesharecdn.com/ss_thumbnails/07saaadl-151204104852-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)




![[2016/2017] AADL (Architecture Analysis and Design Language)](https://cdn.slidesharecdn.com/ss_thumbnails/ivano05saaadl-161220160416-thumbnail.jpg?width=640&height=640&fit=bounds)







![[2017/2018] AADL - Architecture Analysis and Design Language](https://cdn.slidesharecdn.com/ss_thumbnails/ivano04saaadl-171122165132-thumbnail.jpg?width=640&height=640&fit=bounds)