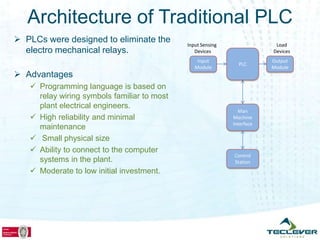
The document describes a PC-based industrial automation control system for a test facility. It discusses the objectives of automating plant operations for optimal production efficiency. It then provides an overview of different automation system types including PLC, DCS, and PC-based systems. The document outlines the architecture and advantages of traditional PLC, DCS, and industrial PC-based control systems. It also describes Teclever's PC-based control system framework and its features.
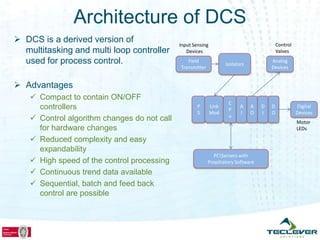
![Advanced Control Systems
Objective: Process control
information system Automating
the Plant Operations
In producing the required output
of the product with minimal A PLC [or] A
ADC
DAC
Sensors & Control
quality variation SCU DCS [or] Valve
Optimal consumption of raw PC Based
material and energy
Maximum efficiency
Improved Productivity
Efficient Monitoring and Control Control
Scalable and Robust Station
Types of Automation Systems
Programmable Logic Measured Variable Controlled Variable
Controller [PLC], Process
Distributed Control System
[DCS] and
PC Based Control System](https://image.slidesharecdn.com/whyrthplcv2-130123042655-phpapp01/85/Why-rthplc-v2-2-320.jpg)
![TECLEVER’s offerings
PC Based Control System Framework
Features
X86 Based system with Medium to High processing power based on
requirement
Real time Linux based environment for Hard Real time application
Developed mostly with FOSS components
Easy integration with any OPC based SCADA packages
Custom Web based control for non critical process monitoring
Standardized driver modules for various Data acquisition cards. [Possible
to have different vendor cPCI/PXI cards]
Possible to have both Data acquisition and control in a single controller.
Possible to configure a High reliable redundant system
Standard Software oriented environment for SCADA and User control
program
Developed a User Control program framework where support for traditional
Ladder or FBD based development is enabled](https://image.slidesharecdn.com/whyrthplcv2-130123042655-phpapp01/85/Why-rthplc-v2-6-320.jpg)
![Controller/Data Acquisition Module
Optional redundancy management for any single point of failure
Possible to have multiple thread User control program
Standard ethernet based communication to and from DAQ system and
server.
High speed operational cycle [Possible to have as small as 10msec]
Able to handle very large number of channel systems](https://image.slidesharecdn.com/whyrthplcv2-130123042655-phpapp01/85/Why-rthplc-v2-9-320.jpg)