Downloaded 67 times




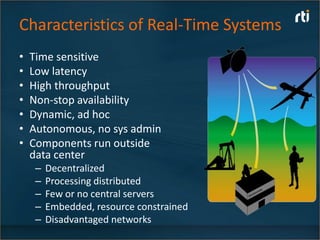
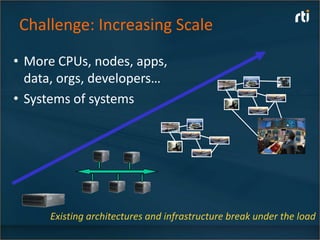
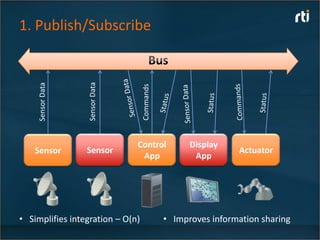
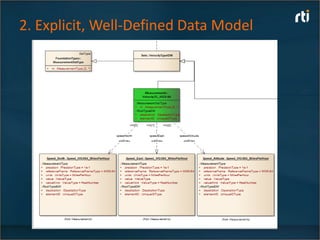
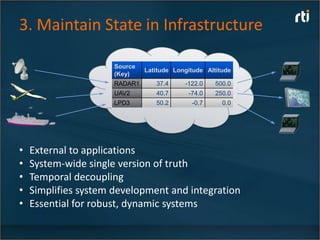
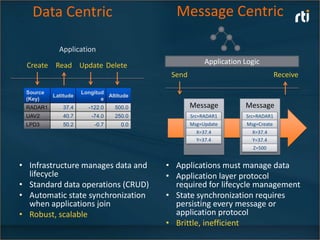
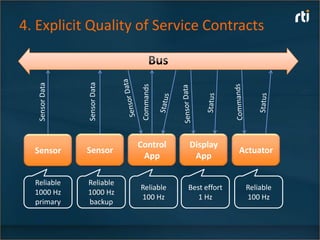
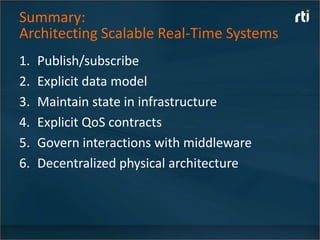
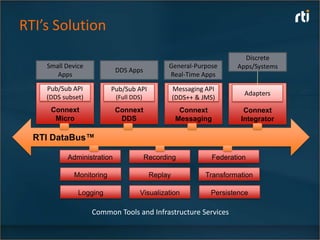
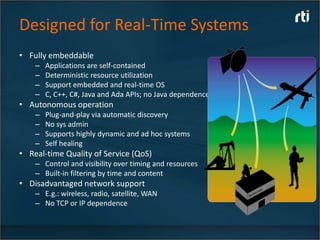


The document discusses the architecture of scalable real-time systems with a focus on the advantages of using publish/subscribe methods over traditional integration. Key elements for scalability include an explicit data model, maintaining state in the infrastructure, quality of service contracts, and decentralized physical architecture. RTI's solution offers efficient tools and services designed for real-time applications, ensuring reliable and autonomous operation in dynamic environments.