大規模言語モデル、世界モデル、基盤モデル
~自己教師付き学習からマルチモーダルAGIへ~
Reed, Scott,et al. "A generalist agent." arXiv preprint
arXiv:2205.06175 (2022).
Wu, Philipp, et al. "DayDreamer: World Models for Physical Robot
Learning." arXiv preprint arXiv:2206.14176 (2022).
Google fires engineer who contended its AI technology was sentient,
By Ramishah Maruf, CNN, Updated 1745 GMT (0145 HKT) July 25,
2022, https://edition.cnn.com/2022/07/23/business/google-ai-
engineer-fired-sentient/index.html
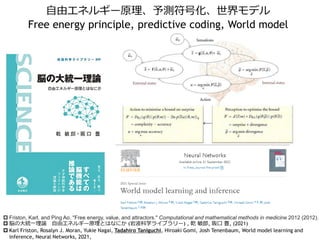
Friston, Karl,and Ping Ao. "Free energy, value, and attractors." Computational and mathematical methods in medicine 2012 (2012).
脳の大統一理論 自由エネルギー原理とはなにか (岩波科学ライブラリー) , 乾 敏郎, 阪口 豊, (2021)
Karl Friston, Rosalyn J. Moran, Yukie Nagai, Tadahiro Taniguchi, Hiroaki Gomi, Josh Tenenbaum, World model learning and
inference, Neural Networks, 2021,
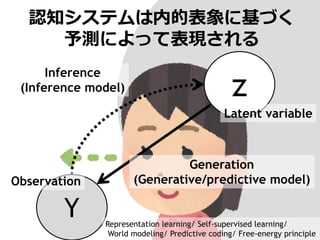
自由エネルギー原理、予測符号化、世界モデル
Free energy principle, predictive coding, World model
PCA
Image Observation
(Grand truth)
Imagination
Reconstruction
Hafner, Danijar, et al. "Learning latent dynamics for planning from
pixels." International Conference on Machine Learning. PMLR, 2019.
Masashi Okada, Norio Kosaka, Tadahiro Taniguchi, PlaNet of the
Bayesians: Reconsidering and Improving Deep Planning Network by
Incorporating Bayesian Inference, IROS 2020
Imagination
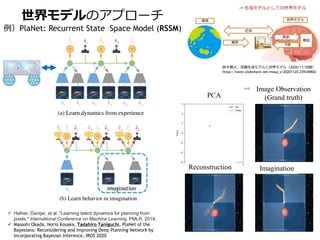
世界モデルのアプローチ
例)PlaNet: Recurrent State Space Model (RSSM)
鈴木雅大、深層生成モデルと世界モデル(2020/11/20版)
https://www.slideshare.net/masa_s/20201120-239349802
11.
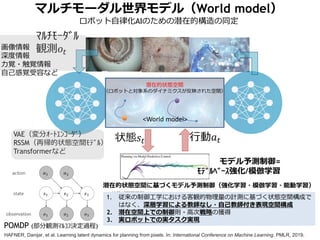
1. 従来の制御工学における客観的物理量の計測に基づく状態空間構成で
はなく、深層学習による教師なし・自己教師付き表現空間構成
2. 潜在空間上での制御則・高次戦略の獲得
3.実ロボットでの実タスク実現
潜在的状態空間
(ロボットと対象系のダイナミクスが反映された空間)
<World model>
マルチモーダル世界モデル(World model)
ロボット自律化AIのための潜在的構造の同定
マルチモーダル
観測𝑜𝑜𝑡𝑡
状態𝑠𝑠𝑡𝑡 行動𝑎𝑎𝑡𝑡
モデル予測制御=
モデルベース強化/模倣学習
POMDP (部分観測マルコフ決定過程)
HAFNER, Danijar, et al. Learning latent dynamics for planning from pixels. In: International Conference on Machine Learning. PMLR, 2019.
画像情報
深度情報
力覚・触覚情報
自己感覚受容など
VAE(変分オートエンコーダ)
RSSM(再帰的状態空間モデル)
Transformerなど
潜在的状態空間に基づくモデル予測制御(強化学習・模倣学習・能動学習)
12.
DayDreamer: World Modelsfor Physical
Robot Learning [Wu+ 2022]
DayDreamer: World Models for Physical Robot Learning
Danijar Hafner, https://www.youtube.com/watch?v=A6Rg0qRwTYs
Wu, Philipp, et al. "DayDreamer: World Models for Physical Robot Learning." arXiv preprint arXiv:2206.14176 (2022).
世界モデルの代表的手法Dreamerを実ロボットで動かす。
比較的単純なタスクに対してそれでもある程度のパフォーマンスを示す。
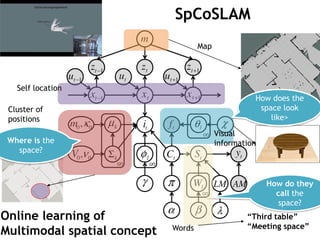
Online spatial conceptformation and lexical
acquisition: SpCoSLAM [Taniguchi+ 2017]
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi and Tetsunari Inamura, Online Spatial Concept and Lexical Acquisition with
Simultaneous Localization and Mapping, IEEE IROS 2017
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Tetsunari Inamura, Improved and scalable online learning of spatial
concepts and language models with mapping, Autonomous Robots, 2020. DOI: 10.1007/s10514-020-09905-0
16.
SpCoSLAM
Map
Self location
How dothey
call the
space?
Visual
information
“Third table”
“Meeting space”
Words
Cluster of
positions
How does the
space look
like>
Where is the
space?
Online learning of
Multimodal spatial concept
17.
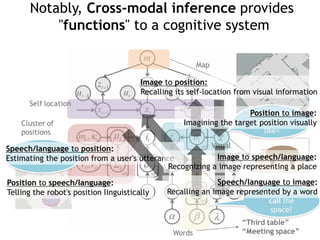
Notably, Cross-modal inferenceprovides
"functions" to a cognitive system
Image to position:
Recalling its self-location from visual information
Position to image:
Imagining the target position visually
Speech/language to position:
Estimating the position from a user's utterance
Position to speech/language:
Telling the robot's position linguistically
Image to speech/language:
Recognizing a image representing a place
Speech/language to image:
Recalling an image represented by a word
18.
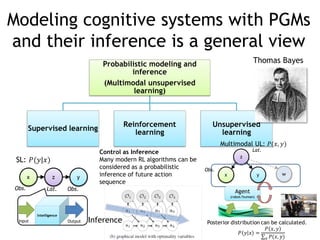
Modeling cognitive systemswith PGMs
and their inference is a general view
Probabilistic modeling and
inference
(Multimodal unsupervised
learning)
Supervised learning
Reinforcement
learning
Unsupervised
learning
Thomas Bayes
Multimodal UL: 𝑃(𝑥, 𝑦)
x
z
y w
Obs.
Lat.
Posterior distribution can be calculated.
𝑃 𝑦 𝑥 =
𝑃 𝑥, 𝑦
∑ 𝑃(𝑥, 𝑦)
𝑥
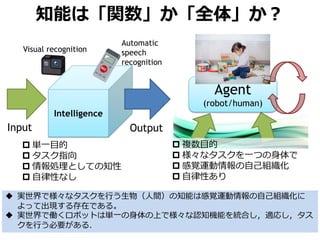
Agent
(robot/human)
x z y
SL: 𝑃(𝑦|𝑥)
Obs. Obs.
Lat.
Intelligence
Input Output
Control as Inference
Many modern RL algorithms can be
considered as a probabilistic
inference of future action
sequence
Inference
19.
Spatial Concept-Based Navigationwith Human Speech
Instructions via Probabilistic Inference [Taniguchi+ 20]
Inference
Control as Probabilistic Inference (CoI)
We can reformulate reinforcement
learning as Bayesian inference on
(PO)MDP.[Levince 18, Okada 20]
SpCoNavi [Taniguchi+ 20]
In the same way as CoI, Bayesian
inference on the PGM of SoCoSLAM can
perform path planning/navigation.
Sergey Levine, Reinforcement Learning and Control as Probabilistic Inference: Tutorial and Review,
arXiv:1805.00909 [cs.LG], 2 May, (2018) https://arxiv.org/abs/1805.00909
Masashi Okada, Norio Kosaka, Tadahiro Taniguchi, PlaNet of the Bayesians: Reconsidering and Improving
Deep Planning Network by Incorporating Bayesian Inference, IROS2020
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Tetsunari Inamura, Spatial Concept-Based
Navigation with Human Speech Instructions via Probabilistic Inference on Bayesian Generative Model,
Advanced Robotics, 34(19), pp.1213-1228, 2020. DOI: 10.1080/01691864.2020.1817777
Go to "kitchen"
Discovered
lexical knowledge
Spatial concept
Planning as "inference"
20.
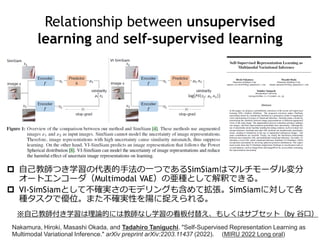
SERKET: An Architecturefor Connecting Stochastic Models
to Realize a Large-Scale Cognitive Model [Nakamura+ 18]
Nakamura T, Nagai T and Taniguchi T, SERKET: An Architecture for Connecting Stochastic Models to Realize a
Large-Scale Cognitive Model. Front. Neurorobot. 12:25. (2018) doi: 10.3389/fnbot.2018.00025
Taniguchi, T., Nakamura, T., Suzuki, M. et al. Neuro-SERKET: Development of Integrative Cognitive System
Through the Composition of Deep Probabilistic Generative Models. New Gener. Comput. 38, 23–48 (2020).
https://doi.org/10.1007/s00354-019-00084-w
Connecting cognitive modules developed as probabilistic generative models and
letting them work together as a single unsupervised learning system.
Having inter-module communication of probabilistic information and
guaranteeing theoretical consistency to some extent.
Neuro-SERKET supports deep generative models, i.e., VAE, as well.
21.
Taniguchi, T., Nakamura,T., Suzuki, M. et al. Neuro-SERKET: Development of Integrative Cognitive System
Through the Composition of Deep Probabilistic Generative Models. New Gener. Comput. 38, 23–48 (2020).
https://doi.org/10.1007/s00354-019-00084-w
Example: unsupervised categorization of image and speech
[Taniguchi+ 2020]
Extension of BRA-drivendevelopment [Yamakawa+ 2021]
Yamakawa, Hiroshi. "The whole brain architecture approach: Accelerating the development of
artificial general intelligence by referring to the brain." Neural Networks 144 (2021): 478-495.
Taniguchi, Akira, Ayako Fukawa, and Hiroshi Yamakawa. "Hippocampal formation-inspired
probabilistic generative model." Neural Networks 151 (2022): 317-335.
Brain
architecture
PGM
27.
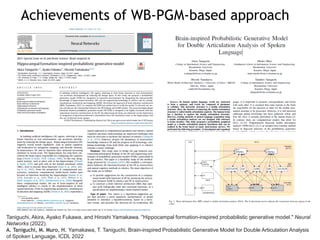
Achievements of WB-PGM-basedapproach
Taniguchi, Akira, Ayako Fukawa, and Hiroshi Yamakawa. "Hippocampal formation-inspired probabilistic generative model." Neural
Networks (2022).
A. Taniguchi, M. Muro, H. Yamakawa, T. Taniguchi, Brain-inspired Probabilistic Generative Model for Double Articulation Analysis
of Spoken Language, ICDL 2022
28.
(Example) Current prototypeof WB-PGM
[Miyazawa+ 2019]
Miyazawa, K., Aoki, T., Horii, T., & Nagai, T. (2019). Integration of multiple generative modules for robot
learning. In Workshop on deep probabilistic generative models for cognitive architecture in robotics.
Miyazawa K, Horii T, Aoki T, Nagai T. Integrated Cognitive Architecture for Robot Learning of Action and
Language. Front Robot AI. 2019;6:131. Published 2019 Nov 29. doi:10.3389/frobt.2019.00131
29.
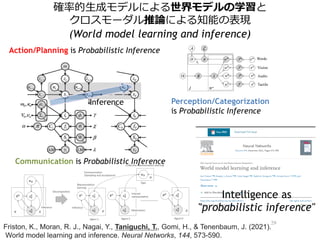
確率的生成モデルによる世界モデルの学習と
クロスモーダル推論による知能の表現
(World model learningand inference)
29
Sign
Agent 1 Agent 2 Agent K
Communication
(Sampling and acceptance)
Inference
Representation
learning
Collective representation learning
Internal
representation
Observation
Decomposition
Inference
Inference
Communication is Probabilistic Inference
Action/Planning is Probabilistic Inference
Perception/Categorization
is Probabilistic Inference
Intelligence as
"probabilistic inference"
Friston, K., Moran, R. J., Nagai, Y., Taniguchi, T., Gomi, H., & Tenenbaum, J. (2021).
World model learning and inference. Neural Networks, 144, 573-590.
T. Tangiuchi, D.Mochihashi, T. Nagai, S. Uchida, N. Inoue, I. Kobayashi, T. Nakamura, Y. Hagiwara, N. Iwahashi & T. Inamura,
Survey on frontiers of language and robotics, Advanced Robotics, 33(15-16), 700-730, 2019. DOI: 10.1080/01691864.2019.1632223
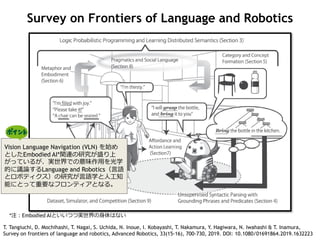
Survey on Frontiers of Language and Robotics
Vision Language Navigation (VLN) を始め
としたEmbodied AI*関連の研究が盛り上
がっているが、実世界での意味作用を光学
的に議論するLanguage and Robotics(言語
とロボティクス)の研究が言語学と人工知
能にとって重要なフロンティアとなる。
*注:Embodied AIといいつつ実世界の身体はない
37.
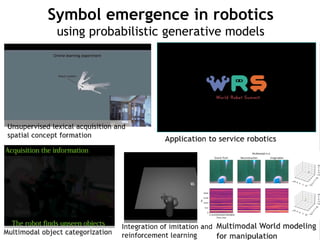
Symbol Emergence inCognitive
Developmental Systems: a Survey
[Taniguchi+ 2018]
Tadahiro Taniguchi, Emre Ugur, Matej Hoffmann, Lorenzo Jamone, Takayuki Nagai, Benjamin Rosman, Toshihiko Matsuka, Naoto
Iwahashi, Erhan Oztop, Justus Piater, Florentin Wörgötter, Symbol Emergence in Cognitive Developmental Systems: a Survey,
IEEE Transactions on Cognitive and Developmental Systems, 2018.
Shonan Meeting: NO.092: Cognitive Development and
Symbol Emergence in Humans and Robots, Shonan Village
Center, October 3 - 7, 2016

![発達的知能への構成論的アプローチ [谷口 2014]
• 人間の子供は自らの身体的経験,感覚運
動情報の統合を通じて機能を獲得し,言
語を獲得し,コミュニケーションをも可
能にする.
• 実世界経験に基づく言語獲得ロボット
(AI)の実現とそれを通した人間の認知
発達の理解
谷口忠大「記号創発ロボティ
クス」(講談社メチエ)
2014
谷口忠大 「コミュニケーションす
るロボットは創れるか」(NTT出
版)2010
記号創発システムへの
構成論的アプローチ
谷口忠大「心を知るた
めの人工知能」
(共立出版)2020
谷口忠大「賀茂川コ
ミュニケーション塾」
(世界思想社)2019](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-5-320.jpg)
![ 私たちの社会において言語などの記号シス
テムはボトムアップ的に形成されている。
認知システムにおける内部表現のボトム
アップ的形成と社会における記号システム
の形成(記号創発システム)は、計算論
的・構成論的にモデル化されるべきである。
また、その現象を実世界の環境で再現する
(記号創発ロボティクス)。
記号創発ロボティクス[Taniguchi+ 16, 19]
Tadahiro Taniguchi, Takayuki Nagai, Tomoaki Nakamura, Naoto Iwahashi, Tetsuya Ogata, and Hideki Asoh,
Symbol Emergence in Robotics: A Survey, Advanced Robotics, 30(11-12) pp.706-728, 2016.
DOI:10.1080/01691864.2016.1164622
Tadahiro Taniguchi, Emre Ugur, Matej Hoffmann, Lorenzo Jamone, Takayuki Nagai, Benjamin Rosman,
Toshihiko Matsuka, Naoto Iwahashi, Erhan Oztop, Justus Piater, Florentin Wörgötter, Symbol Emergence in
Cognitive Developmental Systems: A Survey, IEEE Transactions on Cognitive and Developmental Systems,
11(4), pp.494-516, 2019. DOI: 10.1109/TCDS.2018.2867772](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-6-320.jpg)
![DayDreamer: World Models for Physical
Robot Learning [Wu+ 2022]
DayDreamer: World Models for Physical Robot Learning
Danijar Hafner, https://www.youtube.com/watch?v=A6Rg0qRwTYs
Wu, Philipp, et al. "DayDreamer: World Models for Physical Robot Learning." arXiv preprint arXiv:2206.14176 (2022).
世界モデルの代表的手法Dreamerを実ロボットで動かす。
比較的単純なタスクに対してそれでもある程度のパフォーマンスを示す。](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-12-320.jpg)
![世界モデルが拓く実ロボット産業応用
Tactile-Sensitive NewtonianVAE for High-Accuracy Industrial
Connector-Socket Insertion [Okumura+ 2022]
世界モデルの一種であるNewtonianVAEをUSB端子挿入タ
スクに応用
触覚情報により微妙な「持ち方」の違いを補正
サブミリ(<1mm)でのソケット挿入を実現。
Okumura, Ryo, Nobuki Nishio, and Tadahiro Taniguchi. "Tactile-Sensitive NewtonianVAE for High-Accuracy
Industrial Connector-Socket Insertion." arXiv preprint arXiv:2203.05955 (2022). IROS 2022 accepted
日経ロボティクス 2022/10/7](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-13-320.jpg)
![Online spatial concept formation and lexical
acquisition: SpCoSLAM [Taniguchi+ 2017]
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi and Tetsunari Inamura, Online Spatial Concept and Lexical Acquisition with
Simultaneous Localization and Mapping, IEEE IROS 2017
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Tetsunari Inamura, Improved and scalable online learning of spatial
concepts and language models with mapping, Autonomous Robots, 2020. DOI: 10.1007/s10514-020-09905-0](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-15-320.jpg)
![Spatial Concept-Based Navigation with Human Speech
Instructions via Probabilistic Inference [Taniguchi+ 20]
Inference
Control as Probabilistic Inference (CoI)
We can reformulate reinforcement
learning as Bayesian inference on
(PO)MDP.[Levince 18, Okada 20]
SpCoNavi [Taniguchi+ 20]
In the same way as CoI, Bayesian
inference on the PGM of SoCoSLAM can
perform path planning/navigation.
Sergey Levine, Reinforcement Learning and Control as Probabilistic Inference: Tutorial and Review,
arXiv:1805.00909 [cs.LG], 2 May, (2018) https://arxiv.org/abs/1805.00909
Masashi Okada, Norio Kosaka, Tadahiro Taniguchi, PlaNet of the Bayesians: Reconsidering and Improving
Deep Planning Network by Incorporating Bayesian Inference, IROS2020
Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Tetsunari Inamura, Spatial Concept-Based
Navigation with Human Speech Instructions via Probabilistic Inference on Bayesian Generative Model,
Advanced Robotics, 34(19), pp.1213-1228, 2020. DOI: 10.1080/01691864.2020.1817777
Go to "kitchen"
Discovered
lexical knowledge
Spatial concept
Planning as "inference"](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-19-320.jpg)
![SERKET: An Architecture for Connecting Stochastic Models
to Realize a Large-Scale Cognitive Model [Nakamura+ 18]
Nakamura T, Nagai T and Taniguchi T, SERKET: An Architecture for Connecting Stochastic Models to Realize a
Large-Scale Cognitive Model. Front. Neurorobot. 12:25. (2018) doi: 10.3389/fnbot.2018.00025
Taniguchi, T., Nakamura, T., Suzuki, M. et al. Neuro-SERKET: Development of Integrative Cognitive System
Through the Composition of Deep Probabilistic Generative Models. New Gener. Comput. 38, 23–48 (2020).
https://doi.org/10.1007/s00354-019-00084-w
Connecting cognitive modules developed as probabilistic generative models and
letting them work together as a single unsupervised learning system.
Having inter-module communication of probabilistic information and
guaranteeing theoretical consistency to some extent.
Neuro-SERKET supports deep generative models, i.e., VAE, as well.](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-20-320.jpg)
![Taniguchi, T., Nakamura, T., Suzuki, M. et al. Neuro-SERKET: Development of Integrative Cognitive System
Through the Composition of Deep Probabilistic Generative Models. New Gener. Comput. 38, 23–48 (2020).
https://doi.org/10.1007/s00354-019-00084-w
Example: unsupervised categorization of image and speech
[Taniguchi+ 2020]](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-21-320.jpg)
![A whole brain probabilistic generative model
(WB-PGM): Toward realizing cognitive architectures for
developmental robots [Taniguchi+ 2022]
Tadahiro Taniguchi, Hiroshi Yamakawa, Takayuki Nagai, Kenji Doya, Masamichi Sakagami, Masahiro
Suzuki, Tomoaki Nakamura, Akira Taniguchi, A whole brain probabilistic generative model: Toward
realizing cognitive architectures for developmental robots, Neural Networks, 2022](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-23-320.jpg)

![Extension of BRA-driven development [Yamakawa+ 2021]
Yamakawa, Hiroshi. "The whole brain architecture approach: Accelerating the development of
artificial general intelligence by referring to the brain." Neural Networks 144 (2021): 478-495.
Taniguchi, Akira, Ayako Fukawa, and Hiroshi Yamakawa. "Hippocampal formation-inspired
probabilistic generative model." Neural Networks 151 (2022): 317-335.
Brain
architecture
PGM](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-26-320.jpg)
![(Example) Current prototype of WB-PGM
[Miyazawa+ 2019]
Miyazawa, K., Aoki, T., Horii, T., & Nagai, T. (2019). Integration of multiple generative modules for robot
learning. In Workshop on deep probabilistic generative models for cognitive architecture in robotics.
Miyazawa K, Horii T, Aoki T, Nagai T. Integrated Cognitive Architecture for Robot Learning of Action and
Language. Front Robot AI. 2019;6:131. Published 2019 Nov 29. doi:10.3389/frobt.2019.00131](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-28-320.jpg)


![Symbol Emergence in Cognitive
Developmental Systems: a Survey
[Taniguchi+ 2018]
Tadahiro Taniguchi, Emre Ugur, Matej Hoffmann, Lorenzo Jamone, Takayuki Nagai, Benjamin Rosman, Toshihiko Matsuka, Naoto
Iwahashi, Erhan Oztop, Justus Piater, Florentin Wörgötter, Symbol Emergence in Cognitive Developmental Systems: a Survey,
IEEE Transactions on Cognitive and Developmental Systems, 2018.
Shonan Meeting: NO.092: Cognitive Development and
Symbol Emergence in Humans and Robots, Shonan Village
Center, October 3 - 7, 2016](https://image.slidesharecdn.com/221010cuttanichupub-221015042833-07cf7756/85/7-WBA-WB-PGM-37-320.jpg)


![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Deep Learning 第15章 表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearning15-180601023904-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]World Models](https://cdn.slidesharecdn.com/ss_thumbnails/20180427-180427003856-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Dense Captioning分野のまとめ](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar-201202012355-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Meta-Learning Probabilistic Inference for Prediction](https://cdn.slidesharecdn.com/ss_thumbnails/20181214dl-181218052422-thumbnail.jpg?width=640&height=640&fit=bounds)