参考文献
51
[Lowe1999]Lowe, D.G. (1999). Object recognition from local scale-
invariant features. In IEEE International Conference on ComputerVision
(pp. 1150–1157 vol.2).
[Csurka2004]Csurka, G., Dance, C. R., Fan, L.,Willamowski, J., & Bray,
C. (2004).Visual categorization with bags of keypoints. In Workshop
on statistical learning in computer vision, ECCV (Vol. 1, p. 22).
[Lazebnik2006]Lazebnik, S., Schmid, C., & Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recognizing natural
scene categories. In IEEE Conference on ComputerVision and Pattern
Recognition.
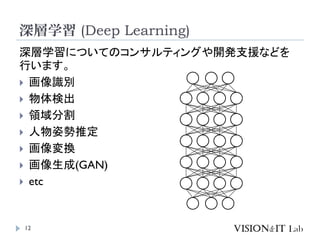
[Perronnin2007]Perronnin, F., & Dance, C. (2007). Fisher kernels on
visual vocabularies for image categorization. In IEEE conference on
ComputerVision and Pattern Recognition.
[Jegou2010]Jegou, H., Douze, M., Schmid, C., & Perez, P. (2010).
Aggregating local descriptors into a compact image representation.
In IEEE Conference on ComputerVision and Pattern Recognition
52.
参考文献
52
[Krizhevsky2012]Krizhevsky,A., Sutskever,I., & Hinton, G. E.
(2012). ImageNet Classification with Deep Convolutional
Neural Networks. In Advances in Neural Information Processing
Systems (NIPS)
[Simonyan2014]Simonyan, K., & Zisserman,A. (2014).Very
Deep Convolutional Networks for Large-Scale Image
Recognition. In IEEE Conference on ComputerVision and Pattern
Recognition.
[Szegedy2015]Szegedy, C., Liu,W., Jia,Y., Sermanet, P., Reed, S.,
Anguelov, D., … Rabinovich,A. (2015). Going Deeper with
Convolutions. Conference on ComputerVision and Pattern
Recognition
[He2016]He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep
Residual Learning for Image Recognition. IEEE Conference on
ComputerVision and Pattern Recognition.
参考文献
69
[Viola2001]Viola, P.,& Jones, M. (2001). Rapid object detection
using a boosted cascade of simple features. IEEE International
Conference on ComputerVision and Pattern Recognition (CVPR).
[Dalal2005]Dalal, N., &Triggs, B. (2005). Histograms of
Oriented Gradients for Human Detection. IEEE Conference on
ComputerVision and Pattern Recognition (CVPR).
[Felzenswalb2009]Felzenszwalb, P. F., Girshick, R. B., McAllester,
D., & Ramanan, D. (2009). Object detection with
discriminatively trained part-based models. IEEETransactions on
Pattern Analysis and Machine Intelligence, 32(9), 1627–1645.
[Girshick2014] Girshick, R., Donahue, J., Darrell,T., & Malik, J.
(2014). Rich feature hierarchies for accurate object detection
and semantic segmentation. In IEEE Conference on Computer
Vision and Pattern Recognition.
70.
参考文献
70
[Girshick2015] Girshick,R. (2015). Fast R-CNN. International
Conference on ComputerVision, 1440–1448.
[Ren2015] Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster
R-CNN:Towards Real-Time Object Detection with Region
Proposal Networks. Advances in Neural Information Processing
Systems (NIPS).
[Redmon2015]Redmon, J., Divvala, S., Girshick, R., & Farhadi,A.
(2015).You Only Look Once: Unified, Real-Time Object
Detection. Conference on ComputerVision and Pattern Recognition.
[Liu2016]Liu,W.,Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.Y., & Berg,A. C. (2016). SSD: Single shot multibox
detector. In IEEE Europian Conference on ComputerVision.
71.
参考文献
71
[Law2018]Law, H.,& Deng, J. (2018). CornerNet:
Detecting Objects as Paired Keypoints. In IEEE Europian
Conference on ComputerVision.
[Zhou2019]Zhou, X.,Wang, D., & Krähenbühl, P. (2019).
Objects as Points. ArXiv, arXiv:1904.
[Duan2019]Duan, K., Bai, S., Xie, L., Qi, H., Huang, Q., &
Tian, Q. (2019). CenterNet: Keypoint triplets for object
detection. In IEEE International Conference on Computer
Vision
参考文献
[Thoma2016] MatinThoma,“A Suvey of Semantic
Segmentation”, arXiv:1602.06541v2
[He2004] He, X., Zemel, R. S., & Carreira-Perpiñán, M. Á.
(2004). Multiscale conditional random fields for image labeling.
In IEEE Conference on ComputerVision and Pattern Recognition.
[Shotton2009] Shotton, J.,Winn, J., Rother, C., & Criminisi,A.
(2009).TextonBoost for image understanding: Multi-class
object recognition and segmentation by jointly modeling
texture, layout, and context. International Journal of Computer
Vision, 81(1), 2–23.
[Krahenbuhl2011] Krahenbuhl, P., & Koltun,V. (2011). Efficient
Inference in Fully Connected CRFs with Gaussian Edge
Potentials. Advances in Neural Information Processing Systems
(NIPS).
92.
参考文献
[Long2015] Long,J., Shelhamer, E., & Darrell,T. (2015). Fully
Convolutional Networks for Semantic Segmentation. In IEEE
Conference on ComputerVision and Pattern Recognition.
[Zheng2015] Zehng, S., Jayasumana, S., Romera-Paredes, B.,
Vineet,V., Su, Z., Du, D., …Torr, P. H. S. (2015). Conditional
Random Fields as Recurrent Neural Networks. In IEEE
Conference on ComputerVision and Pattern Recognition.
[Noh2015] Noh, H., Hong, S., & Han, B. (2015). Learning
deconvolution network for semantic segmentation. In IEEE
International Conference on ComputerVision.
[Ronneberger2015]Ronneberger, O., Fischer, P., & Brox,T.
(2015). U-Net: Convolutional networks for biomedical image
segmentation. International Conference on Medical Image
Computing and Computer-Assisted Intervention.
93.
参考文献
[Yu2016]Yu, F.,& Koltun,V. (2016). Multi-Scale Context
Aggregation by Dilated Convolutions. International
Conference on Machine Learning
[Chen2017]Chen, L.-C., Papandreou, G., Schroff, F., &
Adam, H. (2017). Rethinking Atrous Convolution for
Semantic Image Segmentation. ArXiv, arXiv:1706.
[Zhao2017]Zhao, H., Shi, J., Qi, X.,Wang, X., & Jia, J. (2017).
Pyramid Scene Parsing Network. In IEEE Conference on
ComputerVision and Pattern Recognition.
Building Rome ina Day [Agarwal2009]
110
15万件のインターネット上の画像から1都市を500コアの
クラスタで1日かからずに構築。
https://www.youtube.com/watch?v=sQegEro5Bfo
111.
Building Rome ina Day [Agarwal2009]
111
15万件のインターネット上の画像から1都市を500コアの
クラスタで1日かからずに構築。
112.
Building Rome ina Cloudless Day
[Frahm2010]
112
300万枚の画像から、密な三次元モデルを1台のPC
(+GPU)で約1日で構築
Credit:[Frahm2010]
https://www.youtube.com/watch?v=PySBQ8Q_R8k
113.
Building Rome ina Cloudless Day
[Frahm2010]
113
300万枚の画像から、密な三次元モデルを1台のPC
(+GPU)で約1日で構築
114.
Visual SLAM
114
Structure fromMotionの仕組みを利用して、カメラの動き
と3次元空間を同時に認識し、拡張現実感(AR)などに活
用
Simultaneous Localization And Mapping (SLAM)
Localization
Mapping
参考文献
139
[Snavely2006]Snavely, N.,Seitz, S. M., & Szeliski, R. (2006). Photo
tourism: exploring photo collections in 3D. In Conference on
Computer Graphics and InteractiveTechniques (SIGGRAPH).
[岡谷2010]岡谷貴之. (2010). コンピュータビジョン最先端ガイ
ド3 第1章バンドル調整. アドコムメディア. 1-32
[古川2012]古川泰隆. (2012). コンピュータビジョン最先端ガイ
ド5 第2章複数画像からの三次元復元手法. アドコムメディア.
33-70
[Agarwal2009]Agarwal, S., Snavely, N., Simon, I., Seitz, S. M., &
Szeliski, R. (2009). Building Rome in a day. In International
Conference on ComputerVision (pp. 72–79).
[Frahm2010]Frahm, J., Fite-georgel, P., Gallup, D., Johnson,T.,
Raguram, R.,Wu, C., … Pollefeys, M. (2010). Building Rome on a
Cloudless Day. In European Conference on ComputerVision (pp.
368–381)
140.
参考文献
140
[Mur-Artal2015]Mur-Artal, R.,Montiel, J. M. M., & Tardos, J. D. (2015).
ORB-SLAM:AVersatile and Accurate Monocular SLAM System. IEEE
Transactions on Robotics, 31(5), 1147–1163.
[Rublee2011]Rublee, E., Rabaud,V., Konolige, K., & Bradski, G. (2011).
ORB:An efficient alternative to SIFT or SURF. 2011 International
Conference on ComputerVision
[Newcombe2011]Newcombe, R.A., Lovegrove, S. J., & Davison,A. J.
(2011). DTAM: Dense Tracking and Mapping in Real-Time. In
International Conference on ComputerVision.
[Engel2014]Engel, J., Schops,T., & Cremers, D. (2014). LSD-SLAM:
Large-Scale Direct monocular SLAM. In European Conference on
ComputerVision
[Godard2017] Godard, C., Mac Aodha, O., & Brostow, G. J. (2017).
Unsupervised Monocular Depth Estimation with Left-Right
Consistency. Conference on ComputerVision and Pattern Recognition
141.
参考文献
141
[Tateno2017]Tateno, K.,Tombari,F., Laina, I., & Navab, N. (2017). CNN-
SLAM : Real-time dense monocular SLAM with learned depth prediction. In
IEEE Conference on ComputerVision and Pattern Recognition.
[Zhou2017]Zhou,T., Brown, M., Snavely, N., & Lowe, D. G. (2017).
Unsupervised learning of depth and ego-motion from video. In IEEE
Conference on ComputerVision and Pattern Recognition
[Bloesch2018]Bloesch, M., Czarnowski, J., Clark, R., Leutenegger, S., &
Davison,A. J. (2018). CodeSLAM — Learning a Compact, Optimisable
Representation for DenseVisual SLAM. In IEEE Conference on Computer
Vision and Pattern Recognition.
[Tang2019]Tang, C., &Tan, P. (2019). BA-Net: Dense Bundle Adjustment
Network. In International Conference on Learning Representation.
[Gordon2019]Gordon,A., Li, H., Jonschkowski, R., & Angelova,A. (2019).
Depth from videos in the wild: Unsupervised monocular depth learning
from unknown cameras. IEEE International Conference on ComputerVision
参考文献
148
[Agarwala2004]Agarwala,A., Dontcheva,M.,Agrawala, M., Drucker, S.,
Colburn,A., Curless, B., … Cohen, M. (2004). Interactive digital
photomontage. In Conference on Computer Graphics and InteractiveTechniques
(SIGGRAPH) (Vol. 23).
[Chen2009]Chen,T., Cheng, M.-M.,Tan, P., Shamir,A., & Hu, S.-M. (2009).
Sketch2Photo: internet image montage. In Conference on Computer Graphics
and InteractiveTechniques (SIGGRAPH).
[Radford2016]Radford,A., Metz, L., & Chintala, S. (2016). Unsupervised
Representation Learning with Deep Convolutional Generative Adversarial
Networks. International Conference on Learning Representation.
[Gatys2016]Gatys, L.A., Ecker,A. S., & Bethge, M. (2016). Image Style
Transfer Using Convolutional Neural Networks. In IEEE Conference on
ComputerVision and Pattern Recognition.
[Isola2017]Isola, P., Zhu, J.Y., Zhou,T., & Efros,A.A. (2017). Image-to-image
translation with conditional adversarial networks. IEEE Conference on
ComputerVision and Pattern Recognition.
149.
参考文献
149
[Blanz1999] Blanz,V.,&Vetter,T. (1999).A morphable model for the
synthesis of 3D faces. In Conference on Computer Graphics and
InteractiveTechniques (SIGGRAPH) (pp. 187–194).
[Hoiem2005]Hoiem, D., & Efros,A.A. (2005).Automatic photo pop-
up. In Conference on Computer Graphics and InteractiveTechniques
(SIGGRAPH).
[Tran2018]Tran, L., & Liu, X. (2018). Nonlinear 3D Face Morphable
Model. IEEE Conference on ComputerVision and Pattern Recognition.
[Kato2018]Kato, H., Ushiku,Y., & Harada,T. (2018). Neural 3D Mesh
Renderer. In IEEE Conference on ComputerVision and Pattern
Recognition.
[Saito2019]Saito, S., Huang, Z., Natsume, R., Morishima, S., Li, H., &
Kanazawa,A. (2019). PIFu: Pixel-aligned implicit function for high-
resolution clothed human digitization. IEEE International Conference
on ComputerVision.































![局所特徴量の代表例
36
Scale Invariant FeatureTransform (SIFT) [Lowe1999]
1. 画像のスケール変化や位置ずれに強いキーポイントを検出
スケール変化に弱い
キーポイント
位置ずれに弱い
キーポイント
スケール変化と位置ずれ
に強いキーポイント](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-36-320.jpg)
![局所特徴量の代表例
37
Scale Invariant FeatureTransform (SIFT) [Lowe1999]
1. 画像のスケール変化や位置ずれに強いキーポイントを検出
2. キーポイント周辺から画像の回転に強い特徴量を算出
Histogram of Gradient
Orientations
• 最も画像の濃度変化の大き
い方向を軸とすることで、回
転不変性を実現
• キーポイント検出時に取得し
たスケール情報を元に周辺
パッチのサイズを決定するこ
とでスケール不変性を実現](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-37-320.jpg)
![一般物体認識の特徴量の例
38
Bags-of-Features (BoF) [Csurka2004]
形状(VisualWords)の画像中に現れる頻度(ヒストグラム)を
特徴量とする
Dictionary (Visual Words)
3
0
0
2
1
2
1
1
Histogram of visual words
Image](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-38-320.jpg)


![Pyramid Matching Kernel [Lazebnik2006]
41
Visual Wordの出現率だけでなく、画像のどこで現れたか
まで考慮した特徴ベクトル
画像を階層的に分割し、各ブロックの中でBoF表現](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-41-320.jpg)
![Fisher Vector [Perronnin2007]
42
局所特徴量ベクトルの空間から、Dictionary(Visual
Words)をk-meansではなく混合ガウス分布で作成
画像から取得した局所特徴(D次元)は、各ガウス分布
からのズレ(平均、分散、混合係数の勾配)として表現
画像の各局所特徴のズレの平均を画像を表す特徴ベク
トルとする
局所特徴量全体から混合ガウス分布作成 局所特徴を対数確率密度関数の
勾配で表現](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-42-320.jpg)
![VLAD [Jegou2010]
43
各局所特徴から、近傍のVisualWordとのズレを算出
同じVisualWordに割り当てた局所特徴の差の平均ベク
トルを算出
全てのVisualWordに対応したベクトルを並べたものが
VLAD特徴
VisualWord
局所特徴](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-43-320.jpg)


![AlexNet [Krizhevsky2012]
46
ILSVRC2012優勝モデル
8層の畳み込みニューラルネットワーク(CNN)
畳み込み層とプーリング層が交互に表れる構造](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-46-320.jpg)
![GoogLeNet [Szegedy2014]
47
Inception Moduleを導入することで、層における表現力を
向上
1つの層で様々なサイズのカーネルを畳み込み
1x1畳み込みによりチャネル数を削減
層を深くすることで性能向上(ILSVRC2014で優勝)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-47-320.jpg)
![VGG Net [Simonyan2015]
48
5x5や7x7の畳み込みカーネルの代わりに、3x3の畳み
込みカーネルを繰り返すことで計算量を削減
(当時としては多い)19層まで階層を深くすることで認識
精度を向上
** =
3x3カーネルを2回畳み込むと5x5カーネルを1回畳み込んだものと受容野
のサイズが同じになるが、計算量は18/25になる。](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-48-320.jpg)
![Residual Net [He2016]
49
Residual Blockの導入で、階層をより深くする(152層)ことが可
能に
ショートカットによって畳み込みをバイパス
スキップされた畳み込み層は、ブロックへの入出力信号の残差に対
して学習するため、微細な変動も検出
ILSVRC2015で優勝](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-49-320.jpg)

![参考文献
51
[Lowe1999]Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In IEEE International Conference on ComputerVision
(pp. 1150–1157 vol.2).
[Csurka2004]Csurka, G., Dance, C. R., Fan, L.,Willamowski, J., & Bray,
C. (2004).Visual categorization with bags of keypoints. In Workshop
on statistical learning in computer vision, ECCV (Vol. 1, p. 22).
[Lazebnik2006]Lazebnik, S., Schmid, C., & Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recognizing natural
scene categories. In IEEE Conference on ComputerVision and Pattern
Recognition.
[Perronnin2007]Perronnin, F., & Dance, C. (2007). Fisher kernels on
visual vocabularies for image categorization. In IEEE conference on
ComputerVision and Pattern Recognition.
[Jegou2010]Jegou, H., Douze, M., Schmid, C., & Perez, P. (2010).
Aggregating local descriptors into a compact image representation.
In IEEE Conference on ComputerVision and Pattern Recognition](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-51-320.jpg)
![参考文献
52
[Krizhevsky2012]Krizhevsky,A., Sutskever, I., & Hinton, G. E.
(2012). ImageNet Classification with Deep Convolutional
Neural Networks. In Advances in Neural Information Processing
Systems (NIPS)
[Simonyan2014]Simonyan, K., & Zisserman,A. (2014).Very
Deep Convolutional Networks for Large-Scale Image
Recognition. In IEEE Conference on ComputerVision and Pattern
Recognition.
[Szegedy2015]Szegedy, C., Liu,W., Jia,Y., Sermanet, P., Reed, S.,
Anguelov, D., … Rabinovich,A. (2015). Going Deeper with
Convolutions. Conference on ComputerVision and Pattern
Recognition
[He2016]He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep
Residual Learning for Image Recognition. IEEE Conference on
ComputerVision and Pattern Recognition.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-52-320.jpg)



![Cascaded Haar-like Detector [Viola2001]
56
Haar-like特徴
白領域の画素の和から黒領域の画素の和を引くだけ
積分画像というテクニックとAdaBoostという機械学習アルゴリ
ズムで非常に高速に計算できる
plus
minus](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-56-320.jpg)
![Cascaded Haar-like Detector [Viola2001]
57
Attentional Cascade
画像中は「物体以外」の領域の方が多い
効率よく「物体以外」の領域を削除するために、Adaboost識別
器を複数連結させ、上位で関係ない領域を早めに削除する。
全てのSliding
Window
1 2 3 更なる処理
拒否されたSliding
Window
TRUE TRUE TRUE
FALSE FALSE FALSE](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-57-320.jpg)
![Histogram of Oriented Gradients (HOG)
[Dalal2005]
58
画像の濃度変化方向について場所(Cell)ごとの統計を
取ったもの
輪郭のような特徴が良くとれる
人以外の物体検出にも広く応用されている](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-58-320.jpg)
![Deformable Part Model [Felzenszwalb2009]
59
HOG特徴を複数組み合わせることで、検出精度向上
HOG特徴を抽出する位置の歪みも含めてLatent SVMと
いう機械学習アルゴリズムで学習する
Root filter Parts filter Deformation](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-59-320.jpg)

![R-CNN [Girshick2014]
61
Selective Searchという手法を用いて物体候補領域を検出
し、候補領域上のみCNNで処理することで計算量削減](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-61-320.jpg)
![Fast R-CNN [Girshick2015]
62
R-CNNでは物体候補領域を1つ1つCNNで判別していたた
め遅い(VGGを使用した場合、GPU込みで1枚47秒)
画像全体にCNNをかけて特徴マップを生成し、最後のプーリ
ング層を物体候補領域に合わせて切り出す(ROI-Pooling)
R-CNNを検出時約213倍高速化](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-62-320.jpg)
![Faster R-CNN [Ren2015]
63
R-CNNおよびFast R-CNNではSelective Searchを用いて物体候補
領域を事前に求めておく必要。
Fast R-CNNのSelective Search部分をfeature map上で行うことで、
余計な処理を省き、高精度化/高速化(1枚当たり約200msec)。
→ Region Proposal Network (RPN)
この上(特徴マップ)で物体候
補領域検出を行う](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-63-320.jpg)
![YOLO [Redmon2015]
64
Faster R-CNNのように物体候補領域抽出とクラス識別を分
けず、画像全体を一括で処理
画像をSxSのブロックに分割し、それぞれのブロックで
Bounding Boxと物体クラスを推定
最も信頼度の高いBounding Boxを採用](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-64-320.jpg)
![Single Shot multibox Detector
(SSD)[Liu2016]
65
YOLOと同じ1-stage detector
様々な解像度の特徴マップを生成し、それぞれにアン
カーとなる複数の縦横比のDefault Boxを準備
それぞれのDefault Boxのオフセット(サイズと位置の変
化量)とクラスを推定](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-65-320.jpg)
![CornerNet [Law2018]
66
Bounding Boxを左上と右下のコーナーのペアとして検出
特徴マップから各コーナーのヒートマップ、Embeddings
(同じ Boxの左上と右下を紐づける値)、Boxのオフセット
を出力し、統合](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-66-320.jpg)
![CornerNet後のKey Pointベースの検出
67
Object As Points [Zhou2019]
Bounding Boxの中心を検出し幅と高さを求める
左上、右下に中心の検出も加えることでよりロバストに
CenterNet [Duan2019]](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-67-320.jpg)

![参考文献
69
[Viola2001]Viola, P., & Jones, M. (2001). Rapid object detection
using a boosted cascade of simple features. IEEE International
Conference on ComputerVision and Pattern Recognition (CVPR).
[Dalal2005]Dalal, N., &Triggs, B. (2005). Histograms of
Oriented Gradients for Human Detection. IEEE Conference on
ComputerVision and Pattern Recognition (CVPR).
[Felzenswalb2009]Felzenszwalb, P. F., Girshick, R. B., McAllester,
D., & Ramanan, D. (2009). Object detection with
discriminatively trained part-based models. IEEETransactions on
Pattern Analysis and Machine Intelligence, 32(9), 1627–1645.
[Girshick2014] Girshick, R., Donahue, J., Darrell,T., & Malik, J.
(2014). Rich feature hierarchies for accurate object detection
and semantic segmentation. In IEEE Conference on Computer
Vision and Pattern Recognition.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-69-320.jpg)
![参考文献
70
[Girshick2015] Girshick, R. (2015). Fast R-CNN. International
Conference on ComputerVision, 1440–1448.
[Ren2015] Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster
R-CNN:Towards Real-Time Object Detection with Region
Proposal Networks. Advances in Neural Information Processing
Systems (NIPS).
[Redmon2015]Redmon, J., Divvala, S., Girshick, R., & Farhadi,A.
(2015).You Only Look Once: Unified, Real-Time Object
Detection. Conference on ComputerVision and Pattern Recognition.
[Liu2016]Liu,W.,Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.Y., & Berg,A. C. (2016). SSD: Single shot multibox
detector. In IEEE Europian Conference on ComputerVision.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-70-320.jpg)
![参考文献
71
[Law2018]Law, H., & Deng, J. (2018). CornerNet:
Detecting Objects as Paired Keypoints. In IEEE Europian
Conference on ComputerVision.
[Zhou2019]Zhou, X.,Wang, D., & Krähenbühl, P. (2019).
Objects as Points. ArXiv, arXiv:1904.
[Duan2019]Duan, K., Bai, S., Xie, L., Qi, H., Huang, Q., &
Tian, Q. (2019). CenterNet: Keypoint triplets for object
detection. In IEEE International Conference on Computer
Vision](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-71-320.jpg)

![Semantic Segmentationとは
各画素がどの物体に属するのかを推定する技術
[Thoma2016]より](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-73-320.jpg)
![深層学習以前のSegmentationの流れ
[Thoma2016]より](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-74-320.jpg)
![Sliding Windowを用いた識別
[Thoma2016]より](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-75-320.jpg)


![Conditional Random Field (CRF)によるPost-
Processing
画像の各画素をノードとし、隣接画素間にリンクを張ったグラ
フとみなす。
真の画素のラベルを潜在変数𝒀
画像から取得した特徴量を観測変数𝑿
潜在変数
観測変数
[Thoma2016]より](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-78-320.jpg)
![Conditional Random Field (CRF)によるPost-
Processing
以下の条件で全体のエネルギーを最小化する潜在
変数𝒀を求める
特徴量𝑿から推定した各画素のラベルが、𝒚𝒊のラベルと一致
した時、エネルギー小
隣り合う𝒚𝒊のラベルが同じ時、エネルギー小
潜在変数
観測変数
[Thoma2016]より
一致の時
エネルギー小
一致の時
エネルギー小](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-79-320.jpg)
![CRF for Image Labeling [He2004]
CRFをSemantic Segmentationへ適用した最初の論文
ローカル特徴、全体特徴、ラベル間の位置関係を考慮し
たモデルを構築して最適化](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-80-320.jpg)
![TextonBoost [Shotton2009]
各画素の周囲のテクスチャ(Texton)を元に画素のラベ
ルを学習(Joint Boost)することで物体のコンテクストを学
習
CRFを用いてテクスチャ、色、位置、エッジを考慮した学
習](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-81-320.jpg)
![Fully Connected CRFs [Koltun2011]
隣接画素だけでなく、全画素同士のペアを考慮したFully
Connected CRFsに対し効率的に学習させる方法を提案](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-82-320.jpg)

![Fully Convolutional Network (FCN)
[Long2014]
84
VGG等のベースネットワークの全結合層を、畳み込み層
に変更し、ピクセルごとに教師ラベルが与えられた時、
End-to-Endで学習可能
バイリニア補間で拡大した層に、浅い層の出力を結合す
ることで高解像度化し、1x1畳み込みでラベル判定](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-84-320.jpg)
![CRF as RNN [Zheng2015]
Fully Connected CRFの平均場近似による学習と等価な
RNNを構築
特徴抽出部分にFCN(Fully Convolutional Networks)を
用いることで、end to endで誤差逆伝播法による学習が
行えるネットワークを構築](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-85-320.jpg)
![DeconvNet [Noh2015]
Convolution NetworkとDeconvolution Networkを対で
持つEncoder-Decoder Network
Max Pooling時のインデクスを保存しておき、Unpooling層
で復元
疎なUnpooling層の出力をDeconv層の畳み込みで密に
復元](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-86-320.jpg)
![U-Net [Ronneberger2015]
Decoder側の出力にEncoder側の対応する層の出力を
追加(Skip Connection)することで、高解像度における詳
細情報を補間](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-87-320.jpg)
![DeepLab v3 [Chen2017]
Atrous Convolution (= Dilated Convolution) [Yu2016]と
いう畳み込み層により、Poolingなしでコンテクストの情報
を取得
異なるレートのAtrous Convolutionの出力を結合する
Atrous Spatial Pyramid Poolingにより、マルチスケールの
情報を統合](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-88-320.jpg)
![PSPNet [Zhao2017]
Feature Mapに対し、異なるサイズのPoolingをかけてUp-
samplingする
大きなPoolingサイズのものにコンテクストの情報が含ま
れている](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-89-320.jpg)

![参考文献
[Thoma2016] Matin Thoma,“A Suvey of Semantic
Segmentation”, arXiv:1602.06541v2
[He2004] He, X., Zemel, R. S., & Carreira-Perpiñán, M. Á.
(2004). Multiscale conditional random fields for image labeling.
In IEEE Conference on ComputerVision and Pattern Recognition.
[Shotton2009] Shotton, J.,Winn, J., Rother, C., & Criminisi,A.
(2009).TextonBoost for image understanding: Multi-class
object recognition and segmentation by jointly modeling
texture, layout, and context. International Journal of Computer
Vision, 81(1), 2–23.
[Krahenbuhl2011] Krahenbuhl, P., & Koltun,V. (2011). Efficient
Inference in Fully Connected CRFs with Gaussian Edge
Potentials. Advances in Neural Information Processing Systems
(NIPS).](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-91-320.jpg)
![参考文献
[Long2015] Long, J., Shelhamer, E., & Darrell,T. (2015). Fully
Convolutional Networks for Semantic Segmentation. In IEEE
Conference on ComputerVision and Pattern Recognition.
[Zheng2015] Zehng, S., Jayasumana, S., Romera-Paredes, B.,
Vineet,V., Su, Z., Du, D., …Torr, P. H. S. (2015). Conditional
Random Fields as Recurrent Neural Networks. In IEEE
Conference on ComputerVision and Pattern Recognition.
[Noh2015] Noh, H., Hong, S., & Han, B. (2015). Learning
deconvolution network for semantic segmentation. In IEEE
International Conference on ComputerVision.
[Ronneberger2015]Ronneberger, O., Fischer, P., & Brox,T.
(2015). U-Net: Convolutional networks for biomedical image
segmentation. International Conference on Medical Image
Computing and Computer-Assisted Intervention.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-92-320.jpg)
![参考文献
[Yu2016]Yu, F., & Koltun,V. (2016). Multi-Scale Context
Aggregation by Dilated Convolutions. International
Conference on Machine Learning
[Chen2017]Chen, L.-C., Papandreou, G., Schroff, F., &
Adam, H. (2017). Rethinking Atrous Convolution for
Semantic Image Segmentation. ArXiv, arXiv:1706.
[Zhao2017]Zhao, H., Shi, J., Qi, X.,Wang, X., & Jia, J. (2017).
Pyramid Scene Parsing Network. In IEEE Conference on
ComputerVision and Pattern Recognition.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-93-320.jpg)

![三次元再構成とは?
95
同一対象を撮影した複数枚の画像から、対象の三次元
モデルを復元するタスク
Modified from [Snavely2006]](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-95-320.jpg)














![Building Rome in a Day [Agarwal2009]
110
15万件のインターネット上の画像から1都市を500コアの
クラスタで1日かからずに構築。
https://www.youtube.com/watch?v=sQegEro5Bfo](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-110-320.jpg)
![Building Rome in a Day [Agarwal2009]
111
15万件のインターネット上の画像から1都市を500コアの
クラスタで1日かからずに構築。](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-111-320.jpg)
![Building Rome in a Cloudless Day
[Frahm2010]
112
300万枚の画像から、密な三次元モデルを1台のPC
(+GPU)で約1日で構築
Credit:[Frahm2010]
https://www.youtube.com/watch?v=PySBQ8Q_R8k](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-112-320.jpg)
![Building Rome in a Cloudless Day
[Frahm2010]
113
300万枚の画像から、密な三次元モデルを1台のPC
(+GPU)で約1日で構築](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-113-320.jpg)

![115
ORB-SLAM [Mur-Artal2015]
単眼V-SLAMをTracking、 Local Mapping、Loop Closingの3つ
のスレッドを並列に動作させることで、リアルタイムに実現
全スレッドでORB特徴[Rublee2011]を利用
https://www.youtube.com/watch?v=8DISRmsO2YQ](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-115-320.jpg)
![116
ORB-SLAM [Mur-Artal2015]
単眼V-SLAMをTracking、 Local Mapping、Loop Closingの3つ
のスレッドを並列に動作させることで、リアルタイムに実現
全スレッドでORB特徴[Rublee2011]を利用
入力フレームの
カメラPoseを推
定
Sparseな3D
Map(点群)を作
成
ループを検出し
カメラPoseの誤
差の蓄積を除去
選定され
た
KeyFrame
点群+Poseグラフ
ORBとBoVWで
KeyFrame検索す
るためのDB
共有メモリ](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-116-320.jpg)
![DTAM [Newcombe2011]
密な三次元(深度)の復元とカメラのトラッキングを同時
に行う、Dense MonocularVisual Slamの代表的手法
117
https://www.youtube.com/watch?v=Df9WhgibCQA](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-117-320.jpg)
![DTAM [Newcombe2011]
KeyFrameの各画素と同じ色の画素を周辺フレームから
(エピポーラ線上を)探索することで深度を推定 (Photo
Consistency)
118](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-118-320.jpg)
![119
LSD-SLAM [Engel2014]
特徴点ではなく(勾配の大きい)画素の値を直接使って
Semi-DenseなMap構築およびPose推定
Map Optimizationにより大規模なマップを構築可能
https://www.youtube.com/watch?v=GnuQzP3gty4](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-119-320.jpg)
![120
LSD-SLAM [Engel2014]
特徴点ではなく(勾配の大きい)画素の値を直接使って
Semi-DenseなMap構築およびPose推定
Map Optimizationにより大規模なマップを構築可能
KeyFrameとの画素の差が
最小となるようPose推定
KeyFrameを生成し、その
深度を推定
Loop ClosingによりMap全
体を最適化](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-120-320.jpg)



![単眼Depth推定
124
1枚の画像から三次元的な奥行(Depth)を推定
ラベル付け不要で、動画やステレオ画像から自己教師
あり学習する手法が現在の主流
学習の際に、幾何的な制約を埋め込む
[Godard2017]より
入力画像
Ground Truth
推定結果](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-124-320.jpg)
![Mono-Depth [Godard2017]
125
1枚の画像からDepthを推定するために、ステレオカメラの映像を学習
データとし、その視差画像を推定する問題に置き換え(教師ラベルなし)
片方のカメラ画像から推定した視差を元に、画像をもう片方のカメラ画像
へと変形し、その画像間の差を損失に含める(学習時の幾何的制約)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-125-320.jpg)
![SfM Learner [Zhou2017]
126
単眼カメラ映像からDepthとMotionを推定するネットワークを
自己教師あり学習
推定したDepthとMotionを元に参照画像を周辺画像へ変換し、
その誤差を元にネットワークを学習(学習時の幾何的制約の
埋め込み)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-126-320.jpg)
![SfM Learner [Zhou2017]
127
単眼カメラ映像からDepthとMotionを推定するネットワークを
自己教師あり学習
推定したDepthとMotionを元に参照画像を周辺画像へ変換し、
その誤差を元にネットワークを学習(学習時の幾何的制約の
埋め込み)
単眼画像からDepth推定](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-127-320.jpg)
![SfM Learner [Zhou2017]
128
単眼カメラ映像からDepthとMotionを推定するネットワークを
自己教師あり学習
推定したDepthとMotionを元に参照画像を周辺画像へ変換し、
その誤差を元にネットワークを学習(学習時の幾何的制約の
埋め込み)
画像間のMotion推定](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-128-320.jpg)
![Depth from videos in the wild [Gordon2019]
129
Depth、Camera Motionに加えて、映像中の動物体およ
びカメラ内部パラメータ(含レンズ歪)を推定
Depth推定結果とMotion推定結果を元に画像をフレーム
間で相互に変換し、その誤差を最小化するよう学習
Motion推定ネットワーク
内部パラメータ
カメラ回転角
カメラ並進
並進残差(移動体)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-129-320.jpg)

![CNN-SLAM [Tateno2017]
LSD-SLAM[Engel2014]の深度推定をCNNによる深度推
定に置き換えることでDenseなMapを構築。
Visual SLAMの弱点である、テクスチャがないケース、スケー
ル不定、回転に弱いなどの問題をCNNで補間
SLAMにCNNを導入した最初期の論文
CNNによる深度と
Semantic Labelの推定
LSD-SLAM
131](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-131-320.jpg)
![CodeSLAM [Bloesch2018]
132
Variational Auto Encoder(VAE)を用いてDepthを小さな
Codeで表現
UnetでDepth
推定の補助
情報を画像
から取得
VAEでDepth
を表現する
ネットワークと
Codeを学習
Code](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-132-320.jpg)
![CodeSLAM [Bloesch2018]
133
Variational Auto Encoder(VAE)を用いてDepthを小さな
Codeで表現
Tracking時に投影画像の誤差が最小となるようにCodeを
カメラ姿勢と同時に最適化(既存SLAMの補間+推論時
に幾何的制約)
カメラ姿勢Tとコー
ド(=Depth)Cから、
次フレームへ現フ
レーム画像を投影
した誤差](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-133-320.jpg)
![BA-Net [Tang2019]
134
バンドル調整で使用される最適化手法(Levenberg-
Marquardt法)をネットワーク化することで、SLAM一連の
処理をEnd-to-Endで学習(学習時にも推論時にも幾何的
制約)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-134-320.jpg)
![BA-Net [Tang2019]
135
バンドル調整で使用される最適化手法(Levenberg-
Marquardt法)をネットワーク化することで、SLAM一連の
処理をEnd-to-Endで学習(学習時にも推論時にも幾何的
制約)
単眼画像からDepth(の基底)を推定](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-135-320.jpg)
![BA-Net [Tang2019]
136
バンドル調整で使用される最適化手法(Levenberg-
Marquardt法)をネットワーク化することで、SLAM一連の
処理をEnd-to-Endで学習(学習時にも推論時にも幾何的
制約)
バンドル調整用画像特徴](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-136-320.jpg)
![BA-Net [Tang2019]
137
バンドル調整で使用される最適化手法(Levenberg-
Marquardt法)をネットワーク化することで、SLAM一連の
処理をEnd-to-Endで学習(学習時にも推論時にも幾何的
制約)
バンドル調整ネットワーク](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-137-320.jpg)

![参考文献
139
[Snavely2006]Snavely, N., Seitz, S. M., & Szeliski, R. (2006). Photo
tourism: exploring photo collections in 3D. In Conference on
Computer Graphics and InteractiveTechniques (SIGGRAPH).
[岡谷2010]岡谷貴之. (2010). コンピュータビジョン最先端ガイ
ド3 第1章バンドル調整. アドコムメディア. 1-32
[古川2012]古川泰隆. (2012). コンピュータビジョン最先端ガイ
ド5 第2章複数画像からの三次元復元手法. アドコムメディア.
33-70
[Agarwal2009]Agarwal, S., Snavely, N., Simon, I., Seitz, S. M., &
Szeliski, R. (2009). Building Rome in a day. In International
Conference on ComputerVision (pp. 72–79).
[Frahm2010]Frahm, J., Fite-georgel, P., Gallup, D., Johnson,T.,
Raguram, R.,Wu, C., … Pollefeys, M. (2010). Building Rome on a
Cloudless Day. In European Conference on ComputerVision (pp.
368–381)](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-139-320.jpg)
![参考文献
140
[Mur-Artal2015]Mur-Artal, R., Montiel, J. M. M., & Tardos, J. D. (2015).
ORB-SLAM:AVersatile and Accurate Monocular SLAM System. IEEE
Transactions on Robotics, 31(5), 1147–1163.
[Rublee2011]Rublee, E., Rabaud,V., Konolige, K., & Bradski, G. (2011).
ORB:An efficient alternative to SIFT or SURF. 2011 International
Conference on ComputerVision
[Newcombe2011]Newcombe, R.A., Lovegrove, S. J., & Davison,A. J.
(2011). DTAM: Dense Tracking and Mapping in Real-Time. In
International Conference on ComputerVision.
[Engel2014]Engel, J., Schops,T., & Cremers, D. (2014). LSD-SLAM:
Large-Scale Direct monocular SLAM. In European Conference on
ComputerVision
[Godard2017] Godard, C., Mac Aodha, O., & Brostow, G. J. (2017).
Unsupervised Monocular Depth Estimation with Left-Right
Consistency. Conference on ComputerVision and Pattern Recognition](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-140-320.jpg)
![参考文献
141
[Tateno2017]Tateno, K.,Tombari, F., Laina, I., & Navab, N. (2017). CNN-
SLAM : Real-time dense monocular SLAM with learned depth prediction. In
IEEE Conference on ComputerVision and Pattern Recognition.
[Zhou2017]Zhou,T., Brown, M., Snavely, N., & Lowe, D. G. (2017).
Unsupervised learning of depth and ego-motion from video. In IEEE
Conference on ComputerVision and Pattern Recognition
[Bloesch2018]Bloesch, M., Czarnowski, J., Clark, R., Leutenegger, S., &
Davison,A. J. (2018). CodeSLAM — Learning a Compact, Optimisable
Representation for DenseVisual SLAM. In IEEE Conference on Computer
Vision and Pattern Recognition.
[Tang2019]Tang, C., &Tan, P. (2019). BA-Net: Dense Bundle Adjustment
Network. In International Conference on Learning Representation.
[Gordon2019]Gordon,A., Li, H., Jonschkowski, R., & Angelova,A. (2019).
Depth from videos in the wild: Unsupervised monocular depth learning
from unknown cameras. IEEE International Conference on ComputerVision](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-141-320.jpg)


![画像生成(深層学習前)
144
深層学習以前の画像生成は、せいぜいが「既存の画像を自
然に貼り合わせて目的の画像を作成する」というレベル
複数枚の画像から全員が笑顔の写真を生成(フォトモンタージュ) [Agarwala2004]
スケッチ 検索された画像 合成結果画像
ユーザがスケッチした画像をインターネット上の画像を用いて合成する(Sketch2Photo)[Chen2009]](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-144-320.jpg)
![画像生成(深層学習後)
145
GANやVAEの登場によって、ゼロから画像生成ができる
ようになり、またスタイル変換などの新しいタスクも登場
DC-GAN [Radford2016]
Image StyleTransfer [Getys2016]
Pix2Pix [Getys2016]](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-145-320.jpg)
![1枚の画像から三次元生成(深層学習前)
146
機械学習によって1枚の画像から三次元生成する技術
は深層学習以前にもわずかに存在
[Blanz1999]
1枚の顔画像から3次元復元
[Hoiem2005]
1枚の風景画像から3次元復元](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-146-320.jpg)
![1枚の画像から三次元生成(深層学習後)
147
深層学習の認識力と表現力によってこの分野は大きく進
展
Neural 3D Mesh Renderer[Kato2018]
Nonlinear 3DMM[Tran2018]
PIFu [Saito2019]](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-147-320.jpg)
![参考文献
148
[Agarwala2004]Agarwala,A., Dontcheva, M.,Agrawala, M., Drucker, S.,
Colburn,A., Curless, B., … Cohen, M. (2004). Interactive digital
photomontage. In Conference on Computer Graphics and InteractiveTechniques
(SIGGRAPH) (Vol. 23).
[Chen2009]Chen,T., Cheng, M.-M.,Tan, P., Shamir,A., & Hu, S.-M. (2009).
Sketch2Photo: internet image montage. In Conference on Computer Graphics
and InteractiveTechniques (SIGGRAPH).
[Radford2016]Radford,A., Metz, L., & Chintala, S. (2016). Unsupervised
Representation Learning with Deep Convolutional Generative Adversarial
Networks. International Conference on Learning Representation.
[Gatys2016]Gatys, L.A., Ecker,A. S., & Bethge, M. (2016). Image Style
Transfer Using Convolutional Neural Networks. In IEEE Conference on
ComputerVision and Pattern Recognition.
[Isola2017]Isola, P., Zhu, J.Y., Zhou,T., & Efros,A.A. (2017). Image-to-image
translation with conditional adversarial networks. IEEE Conference on
ComputerVision and Pattern Recognition.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-148-320.jpg)
![参考文献
149
[Blanz1999] Blanz,V., &Vetter,T. (1999).A morphable model for the
synthesis of 3D faces. In Conference on Computer Graphics and
InteractiveTechniques (SIGGRAPH) (pp. 187–194).
[Hoiem2005]Hoiem, D., & Efros,A.A. (2005).Automatic photo pop-
up. In Conference on Computer Graphics and InteractiveTechniques
(SIGGRAPH).
[Tran2018]Tran, L., & Liu, X. (2018). Nonlinear 3D Face Morphable
Model. IEEE Conference on ComputerVision and Pattern Recognition.
[Kato2018]Kato, H., Ushiku,Y., & Harada,T. (2018). Neural 3D Mesh
Renderer. In IEEE Conference on ComputerVision and Pattern
Recognition.
[Saito2019]Saito, S., Huang, Z., Natsume, R., Morishima, S., Li, H., &
Kanazawa,A. (2019). PIFu: Pixel-aligned implicit function for high-
resolution clothed human digitization. IEEE International Conference
on ComputerVision.](https://image.slidesharecdn.com/20200910deeplearning2computervision-200910070745/85/20200910-JPTA-149-320.jpg)






![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-](https://cdn.slidesharecdn.com/ss_thumbnails/20181026staterepresenration-181127055206-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]MetaFormer is Actually What You Need for Vision](https://cdn.slidesharecdn.com/ss_thumbnails/20220121metaformer-220121085750-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Deep Learning 第15章 表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearning15-180601023904-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Attention Is All You Need](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks170714-170714005330-thumbnail.jpg?width=640&height=640&fit=bounds)


















































