Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
The Whole Brain Architecture Initiative
PDF, PPTX
858 views
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
尾形哲也氏による講演 https://wba-initiative.org/20980/
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
6
/ 22
Most read
7
/ 22
8
/ 22
9
/ 22
10
/ 22
11
/ 22
Most read
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
Most read
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PDF
【DL輪読会】A Path Towards Autonomous Machine Intelligence
by
Deep Learning JP
PDF
AIのラボからロボティクスへ --- 東大松尾研究室のWRS2020パートナーロボットチャレンジへの挑戦
by
Tatsuya Matsushima
PDF
【DL輪読会】How Much Can CLIP Benefit Vision-and-Language Tasks?
by
Deep Learning JP
PPTX
[DL輪読会]Object-Centric Learning with Slot Attention
by
Deep Learning JP
PPTX
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
PPTX
[DL輪読会]World Models
by
Deep Learning JP
PDF
【学会聴講報告】CVPR2024からみるVision最先端トレンド / CVPR2024 report
by
Sony - Neural Network Libraries
PPTX
[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination
by
Deep Learning JP
【DL輪読会】A Path Towards Autonomous Machine Intelligence
by
Deep Learning JP
AIのラボからロボティクスへ --- 東大松尾研究室のWRS2020パートナーロボットチャレンジへの挑戦
by
Tatsuya Matsushima
【DL輪読会】How Much Can CLIP Benefit Vision-and-Language Tasks?
by
Deep Learning JP
[DL輪読会]Object-Centric Learning with Slot Attention
by
Deep Learning JP
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
[DL輪読会]World Models
by
Deep Learning JP
【学会聴講報告】CVPR2024からみるVision最先端トレンド / CVPR2024 report
by
Sony - Neural Network Libraries
[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination
by
Deep Learning JP
What's hot
PDF
数学で解き明かす深層学習の原理
by
Taiji Suzuki
PPTX
Triplet Loss 徹底解説
by
tancoro
PDF
深層生成モデルと世界モデル
by
Masahiro Suzuki
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PDF
よくわかるフリストンの自由エネルギー原理
by
Masatoshi Yoshida
PDF
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PPTX
【DL輪読会】Scaling Laws for Neural Language Models
by
Deep Learning JP
PPTX
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
PDF
ELBO型VAEのダメなところ
by
KCS Keio Computer Society
PDF
「世界モデル」と関連研究について
by
Masahiro Suzuki
PDF
機械学習モデルのハイパパラメータ最適化
by
gree_tech
PDF
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
PPTX
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
PPTX
これからの Vision & Language ~ Acadexit した4つの理由
by
Yoshitaka Ushiku
PPTX
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
PDF
深層学習による非滑らかな関数の推定
by
Masaaki Imaizumi
PPTX
[DL輪読会] マルチエージェント強化学習と心の理論
by
Deep Learning JP
PPTX
[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets
by
Deep Learning JP
PDF
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
数学で解き明かす深層学習の原理
by
Taiji Suzuki
Triplet Loss 徹底解説
by
tancoro
深層生成モデルと世界モデル
by
Masahiro Suzuki
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
よくわかるフリストンの自由エネルギー原理
by
Masatoshi Yoshida
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
【DL輪読会】Scaling Laws for Neural Language Models
by
Deep Learning JP
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
ELBO型VAEのダメなところ
by
KCS Keio Computer Society
「世界モデル」と関連研究について
by
Masahiro Suzuki
機械学習モデルのハイパパラメータ最適化
by
gree_tech
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
これからの Vision & Language ~ Acadexit した4つの理由
by
Yoshitaka Ushiku
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
深層学習による非滑らかな関数の推定
by
Masaaki Imaizumi
[DL輪読会] マルチエージェント強化学習と心の理論
by
Deep Learning JP
[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets
by
Deep Learning JP
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
Similar to 第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
PDF
進化したWBAアプローチの現在@第5回WBAシンポジウム: 山川宏
by
The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:全脳確率的生成モデル(WB-PGM)〜世界モデルと推論に基づく汎用人工知能に向けて
by
The Whole Brain Architecture Initiative
PPT
Brain-Inspired Robotics and Neural Dynamics: Lecture 01 (2015)
by
Hiroaki Wagatsuma
PDF
第7回WBAシンポジウム:基調講演
by
The Whole Brain Architecture Initiative
PDF
ロボットによる一般問題解決
by
SOINN Inc.
PPTX
「実ロボットの運動生成」
by
Yurika Doi
PPT
Brain-Inspired Robotics and Neural Dynamics: Lecture 02 (2015)
by
Hiroaki Wagatsuma
PDF
2021.1.28 understanding brain
by
Ryuichi Maruyama
PDF
実社会・実環境におけるロボットの機械学習
by
Kuniyuki Takahashi
PPTX
第3回WBAハッカソン第2回説明会資料(配布用)
by
The Whole Brain Architecture Initiative
PDF
RLアーキテクチャ勉強会 MERLIN
by
YumaKajihara
PDF
実社会・実環境におけるロボットの機械学習 ver. 2
by
Kuniyuki Takahashi
PDF
第3回全脳アーキテクチャ勉強会(山川)発表資料
by
ドワンゴ 人工知能研究所
PDF
Icra2020 v2
by
robotpaperchallenge
PDF
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
PPTX
全脳関西編(松尾)
by
Yutaka Matsuo
PDF
ICML2017 参加報告会 山本康生
by
Yahoo!デベロッパーネットワーク
PPTX
第2回nips読み会・関西資料『unsupervised learning for physical interaction through video ...
by
koji ochiai
PPTX
全脳アーキテクチャ若手の会 強化学習
by
kwp_george
PDF
Neural Rejuvenation: Improving Deep Network Training by Enhancing Computation...
by
Yosuke Shinya
進化したWBAアプローチの現在@第5回WBAシンポジウム: 山川宏
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:全脳確率的生成モデル(WB-PGM)〜世界モデルと推論に基づく汎用人工知能に向けて
by
The Whole Brain Architecture Initiative
Brain-Inspired Robotics and Neural Dynamics: Lecture 01 (2015)
by
Hiroaki Wagatsuma
第7回WBAシンポジウム:基調講演
by
The Whole Brain Architecture Initiative
ロボットによる一般問題解決
by
SOINN Inc.
「実ロボットの運動生成」
by
Yurika Doi
Brain-Inspired Robotics and Neural Dynamics: Lecture 02 (2015)
by
Hiroaki Wagatsuma
2021.1.28 understanding brain
by
Ryuichi Maruyama
実社会・実環境におけるロボットの機械学習
by
Kuniyuki Takahashi
第3回WBAハッカソン第2回説明会資料(配布用)
by
The Whole Brain Architecture Initiative
RLアーキテクチャ勉強会 MERLIN
by
YumaKajihara
実社会・実環境におけるロボットの機械学習 ver. 2
by
Kuniyuki Takahashi
第3回全脳アーキテクチャ勉強会(山川)発表資料
by
ドワンゴ 人工知能研究所
Icra2020 v2
by
robotpaperchallenge
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
全脳関西編(松尾)
by
Yutaka Matsuo
ICML2017 参加報告会 山本康生
by
Yahoo!デベロッパーネットワーク
第2回nips読み会・関西資料『unsupervised learning for physical interaction through video ...
by
koji ochiai
全脳アーキテクチャ若手の会 強化学習
by
kwp_george
Neural Rejuvenation: Improving Deep Network Training by Enhancing Computation...
by
Yosuke Shinya
More from The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:松嶋達也〜自己紹介と論点の提示〜スケーラブルなロボット学習システムに向けて
by
The Whole Brain Architecture Initiative
PPTX
第7回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
PDF
BriCAプラットフォーム説明会(2022-05)
by
The Whole Brain Architecture Initiative
PDF
第3回WBAレクチャー:BRA評価
by
The Whole Brain Architecture Initiative
PDF
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
PDF
第3回WBAレクチャー:海馬体周辺におけるBRA駆動開発の進展
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:Humanity X.0 共生創発と情報の身体性
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:人の手のひら AIの手のひら
by
The Whole Brain Architecture Initiative
PPTX
第6回WBAシンポジウム:人間は動物を必要とするが、 AIは人間を必要とするか?
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
PDF
技術進展がもたらす進化戦略の終焉
by
The Whole Brain Architecture Initiative
PDF
The 5th WBA Hackathon Orientation -- Cerenaut Part
by
The Whole Brain Architecture Initiative
PPTX
Task Details of the 5th Whole Brain Architecture Hackathon
by
The Whole Brain Architecture Initiative
PDF
Introduction to the 5th Whole Brain Architecture Hackathon Orientation
by
The Whole Brain Architecture Initiative
PDF
WBAレクチャー#1BRAの審査と登録(山川宏)
by
The Whole Brain Architecture Initiative
PDF
WBAレクチャー#1SCID法の実例 (布川絢子)
by
The Whole Brain Architecture Initiative
PDF
WBAレクチャー#1脳機能の体系的理解を目指して(山川宏)
by
The Whole Brain Architecture Initiative
PDF
WBA勉強会 〜予測する脳と主体性の現象学〜
by
The Whole Brain Architecture Initiative
PDF
「境界のない外」 をどう考えられるか?──現象学の観点から──
by
The Whole Brain Architecture Initiative
PDF
現在のAIの到達点と残された課題@第5回WBAシンポジウム: 松尾豊
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:松嶋達也〜自己紹介と論点の提示〜スケーラブルなロボット学習システムに向けて
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
BriCAプラットフォーム説明会(2022-05)
by
The Whole Brain Architecture Initiative
第3回WBAレクチャー:BRA評価
by
The Whole Brain Architecture Initiative
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
第3回WBAレクチャー:海馬体周辺におけるBRA駆動開発の進展
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:Humanity X.0 共生創発と情報の身体性
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:人の手のひら AIの手のひら
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:人間は動物を必要とするが、 AIは人間を必要とするか?
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
技術進展がもたらす進化戦略の終焉
by
The Whole Brain Architecture Initiative
The 5th WBA Hackathon Orientation -- Cerenaut Part
by
The Whole Brain Architecture Initiative
Task Details of the 5th Whole Brain Architecture Hackathon
by
The Whole Brain Architecture Initiative
Introduction to the 5th Whole Brain Architecture Hackathon Orientation
by
The Whole Brain Architecture Initiative
WBAレクチャー#1BRAの審査と登録(山川宏)
by
The Whole Brain Architecture Initiative
WBAレクチャー#1SCID法の実例 (布川絢子)
by
The Whole Brain Architecture Initiative
WBAレクチャー#1脳機能の体系的理解を目指して(山川宏)
by
The Whole Brain Architecture Initiative
WBA勉強会 〜予測する脳と主体性の現象学〜
by
The Whole Brain Architecture Initiative
「境界のない外」 をどう考えられるか?──現象学の観点から──
by
The Whole Brain Architecture Initiative
現在のAIの到達点と残された課題@第5回WBAシンポジウム: 松尾豊
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
1.
第7回全脳アーキテクチャ シンポジウム 2022.10.12 予測符号化モデルとしての 深層予測学習とロボット 知能化 尾形哲也 早稲⽥⼤学 理⼯学術院 教授/AIロボット研究所
所⻑ 産業技術総合研究所⼈⼯知能研究センター 特定フェロー
2.
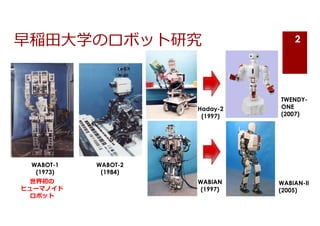
WABOT-1 (1973) WABOT-2 (1984) Haday-2 (1997) WABIAN (1997) 早稲⽥⼤学のロボット研究 WABIAN-II (2005) TWENDY- ONE (2007) 世界初の ヒューマノイド ロボット 2
3.
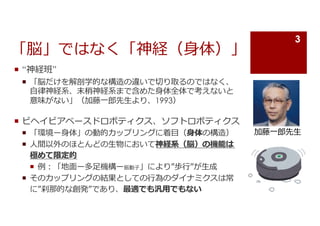
「脳」ではなく「神経(⾝体)」 ¡ “神経班” ¡ 「脳だけを解剖学的な構造の違いで切り取るのではなく、 ⾃律神経系、末梢神経系まで含めた⾝体全体で考えないと 意味がない」(加藤⼀郎先⽣より、1993) ¡
ビヘイビアベースドロボティクス、ソフトロボティクス ¡ 「環境ー⾝体」の動的カップリングに着⽬(⾝体の構造) ¡ ⼈間以外のほとんどの⽣物において神経系(脳)の機能は 極めて限定的 ¡ 例︓「地⾯ー多⾜機構ー振動⼦」により”歩⾏”が⽣成 ¡ そのカップリングの結果としての⾏為のダイナミクスは常 に”刹那的な創発”であり、最適でも汎⽤でもない 加藤⼀郎先⽣ 3
4.
発達ロボティクス ×「脳の各機能をロボット(⾝体)が参照する」 ◯「⾝体を脳が参照し各機能が分化・創発する(発達)」 ×「マルチモーダル情報を学習できる」 ◯「⾝体の時空間的制約に拘束されたマルチモーダル情報 しか存在しない(各モーダルは分離できない)」 神経学的変異ー認知プロセスー身体行動それぞれの レベルの結びつきをシステム的に理解する 4 [浅⽥, 國吉, 2006-]
5.
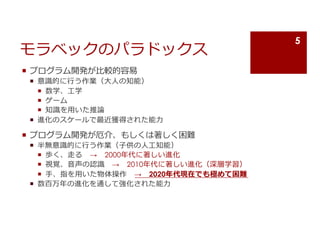
モラベックのパラドックス ¡ プログラム開発が⽐較的容易 ¡ 意識的に⾏う作業(⼤⼈の知能) ¡
数学、⼯学 ¡ ゲーム ¡ 知識を⽤いた推論 ¡ 進化のスケールで最近獲得された能⼒ ¡ プログラム開発が厄介、もしくは著しく困難 ¡ 半無意識的に⾏う作業(⼦供の⼈⼯知能) ¡ 歩く、⾛る → 2000年代に著しい進化 ¡ 視覚、⾳声の認識 → 2010年代に著しい進化(深層学習) ¡ ⼿、指を⽤いた物体操作 → 2020年代現在でも極めて困難 ¡ 数百万年の進化を通して強化された能⼒ 5
6.
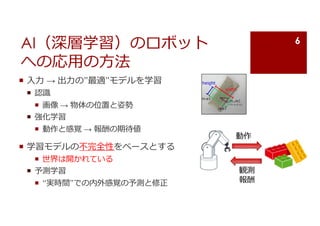
AI(深層学習)のロボット への応⽤の⽅法 ¡ ⼊⼒ →
出⼒の”最適”モデルを学習 ¡ 認識 ¡ 画像 → 物体の位置と姿勢 ¡ 強化学習 ¡ 動作と感覚 → 報酬の期待値 ¡ 学習モデルの不完全性をベースとする ¡ 世界は開かれている ¡ 予測学習 ¡ “実時間”での内外感覚の予測と修正 動作 観測 報酬 6
7.
ロボティクス-⾝体性の概念から 「環境ー⾝体ー神経系(脳)」のカップリング ¡ 神経系(脳)の機能は極めて限定的 ¡ 深層予測学習
(2013-) ¡ カップリングの中で神経系に深層学習を適⽤ ¡ 視覚、触覚などの多次元の感覚と⾝体、環境を カップリング 7 [K. Noda, H. Arie, Y. Suga, T. Ogata, 2014]
8.
予測符号化と⾃由エネルギー原理 8 [K. Friston,
2010] 環境 (感覚の⽣成) 感覚予測 (平均, 精度) 感覚⼊⼒ ! − log %('|)) 精度重み付 予測誤差 " +!()) シナプス重み ,-.. ./.-+0 ∗ = − log % ' ) + 3"# 4 ) ' ||%()) 精度重み付 予測誤差 (Accuracy) 事前信念の 影響 (Complexity) ⾃由エネルギーを最⼩化するためのパラメータ ・w → 学習 ・x → 感覚の修正(⾏為の⽣成) ・q(z) → 知覚の修正(仮想知覚の⽣成) ・ ! "! → 感覚の精度 ・ ! "" → 事前信念の精度 + ) + /567. # *簡略化のため !周辺の負の対数尤度期待値計算は省略 %()) 4()|') 事後信念 (予測) 事前信念 (予測) 注意
9.
Rao 1999, Tani
2003, Friston 2011, Yamashita 2012 etc. • 環境とインタラクションを⾏う際の”予測誤差最⼩化”のための⽅策 予測符号化の簡単なイメージ1 実世界 内部モデル 感覚 予測 ⾏為 知覚 9 H. Haker et al. 2016.
10.
“学習”により内部モデルを 変えて予測誤差を最⼩化 予測符号化の簡単なイメージ2 予測誤差最⼩化のための3つの⽅策 “仮想の知覚”を⽣成して 予測誤差を最⼩化 “⾏為の修正”により 予測誤差を最⼩化 機械学習の視点 10 低コスト ⾼コスト 能動的推論の視点
11.
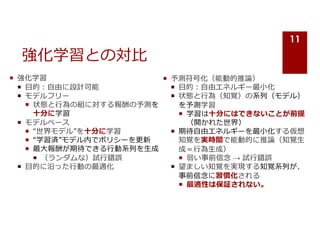
強化学習との対⽐ ¡ 強化学習 ¡ ⽬的︓⾃由に設計可能 ¡
モデルフリー ¡ 状態と⾏為の組に対する報酬の予測を ⼗分に学習 ¡ モデルベース ¡ “世界モデル”を⼗分に学習 ¡ “学習済”モデル内でポリシーを更新 ¡ 最⼤報酬が期待できる⾏動系列を⽣成 ¡ (ランダムな)試⾏錯誤 ¡ ⽬的に沿った⾏動の最適化 ¡ 予測符号化(能動的推論) ¡ ⽬的︓⾃由エネルギー最⼩化 ¡ 状態と⾏為(知覚)の系列(モデル) を予測学習 ¡ 学習は⼗分にはできないことが前提 (開かれた世界) ¡ 期待⾃由エネルギーを最⼩化する仮想 知覚を実時間で能動的に推論(知覚⽣ 成=⾏為⽣成) ¡ 弱い事前信念 → 試⾏錯誤 ¡ 望ましい知覚を実現する知覚系列が、 事前信念に習慣化される ¡ 最適性は保証されない。 11
12.
深層予測学習のフレームワーク 関節⾓度⼊⼒ 深層学習 画像 エンコーダ DCAE 関節⾓度予測 深層学習 画像 デコーダ DCAE 関節 ⾓度 指令値 予測画像 視野画像 ⼊⼒ 深層予測 学習器 LSTM, MTRNN 時間ステップ ⼈間の操縦データ(スキル) の収集(少量データ) 実時間で動作・画像の予測を修正し続ける 学習(世界モデル) 12 仮想の知覚 ⾏為の修正 実画像 [P. Yang+, 2016]
13.
「⾝体知」に基づくロボット独⾃の 世界モデルを獲得 p 数⼗回の学習のみ p “未学習”のタオル,本を⾼速かつ 反復して折り畳み可能 P.
Yang+, IEEE RA-L, 2016, ICRA2017 etc. エクスペリエンス・ベースド・ロボティクス (尾形提案) p JST CRDS戦略プロポーザル「第4世代AIの 研究開発」(2020) p NEDO次世代⼈⼯知能・ロボット中核技術 開発ハンドブック(2020) 深層予測学習のデモンストレーション 折り畳み(タオル配置・種類,本)含︓⼿⾸柔軟関節 Cebit 2017, CEATEC2017,国際ロボット展2017 13
14.
ExaWizards ExaWizards 深層予測学習の企業応⽤例 ハーネス組み 付け(2021) 液体計量(2021) ¡ 粘性の異なる液 体を事前知識な しで計量 汎⽤モデル (2017) ¡
タオル畳み ¡ サラダ盛り 付け 粉体計量(2018) 14
15.
ジッパー開け 2021.5 15 [H.
Ichiwara+, ICRA2022] [H. Ito+, ICRA2022]
16.
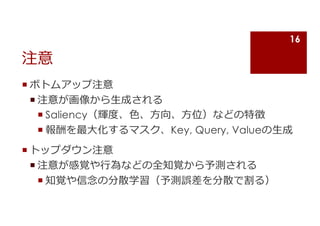
注意 ¡ ボトムアップ注意 ¡ 注意が画像から⽣成される ¡
Saliency(輝度、⾊、⽅向、⽅位)などの特徴 ¡ 報酬を最⼤化するマスク、Key, Query, Valueの⽣成 ¡ トップダウン注意 ¡ 注意が感覚や⾏為などの全知覚から予測される ¡ 知覚や信念の分散学習(予測誤差を分散で割る) 16
17.
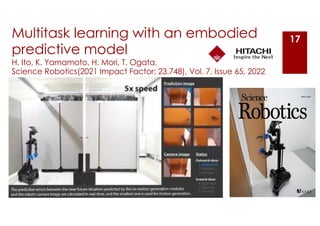
Multitask learning with
an embodied predictive model H. Ito, K. Yamamoto, H. Mori, T. Ogata, Science Robotics(2021 Impact Factor: 23.748), Vol. 7, Issue 65, 2022 17
18.
設計思想 1. 経験の学習(エクスペリエンス・ベースド) ¡ 運動と感覚を区別しない ¡
「感覚ー>動作」のマップではなく,感覚運動 が⼀体化した”知覚”系列(経験)、内観を学習 2. “Multi-time scale”を扱う再帰結合型RNNの 階層予測構造 ¡ 異なったレベル(時定数、次元)の予測 ¡ トップダウンとボトムアップのインタラクション 3. “Symbol grounding”,実世界と記号世界 ¡ 多義性,世界観の共有,創造性... Slow Context S-MTRNN Sensory Prediction Fast Context Sensory Inputs Higher-Level Network Lower-Level Network Variance Prediction Multi-Time scale RNN [Y. Yamashita, J. Tani, 2008] 18
19.
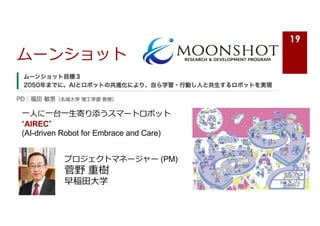
ムーンショット 19 ⼀⼈に⼀台⼀⽣寄り添うスマートロボット “AIREC” (AI-driven Robot for
Embrace and Care) プロジェクトマネージャー (PM) 菅野 重樹 早稲⽥⼤学
20.
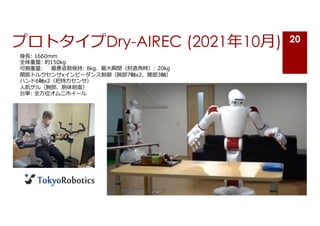
プロトタイプDry-AIREC (2021年10⽉) 20 ⾝⻑:
1660mm 全体重量: 約150kg 可搬重量: 最悪姿勢保持: 8kg、最⼤瞬間(肘直⾓時): 20kg 関節トルクセンサxインピーダンス制御(腕部7軸x2、腰部3軸) ハンド6軸x2(把持⼒センサ) ⼈肌ゲル(腕部、胴体前⾯) 台⾞: 全⽅位オムニホイール
21.
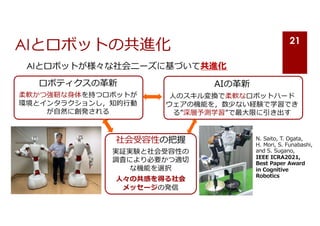
AIとロボットの共進化 AIとロボットが様々な社会ニーズに基づいて共進化 21 ロボティクスの⾰新 柔軟かつ強靭な⾝体を持つロボットが 環境とインタラクションし,知的⾏動 が⾃然に創発される AIの⾰新 ⼈のスキル変換で柔軟なロボットハード ウェアの機能を,数少ない経験で学習でき る”深層予測学習”で最⼤限に引き出す 社会受容性の把握 実証実験と社会受容性の 調査により必要かつ適切 な機能を選択 ⼈々の共感を得る社会 メッセージの発信 N. Saito, T.
Ogata, H. Mori, S. Funabashi, and S. Sugano, IEEE ICRA2021, Best Paper Award in Cognitive Robotics
22.
おわり
Download


![発達ロボティクス
×「脳の各機能をロボット(⾝体)が参照する」
◯「⾝体を脳が参照し各機能が分化・創発する(発達)」
×「マルチモーダル情報を学習できる」
◯「⾝体の時空間的制約に拘束されたマルチモーダル情報
しか存在しない(各モーダルは分離できない)」
神経学的変異ー認知プロセスー身体行動それぞれの
レベルの結びつきをシステム的に理解する
4
[浅⽥, 國吉, 2006-]](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-4-320.jpg)
![ロボティクス-⾝体性の概念から
「環境ー⾝体ー神経系(脳)」のカップリング
¡ 神経系(脳)の機能は極めて限定的
¡ 深層予測学習 (2013-)
¡ カップリングの中で神経系に深層学習を適⽤
¡ 視覚、触覚などの多次元の感覚と⾝体、環境を
カップリング
7
[K. Noda, H. Arie, Y.
Suga, T. Ogata, 2014]](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-7-320.jpg)
![予測符号化と⾃由エネルギー原理 8
[K. Friston, 2010]
環境 (感覚の⽣成)
感覚予測
(平均, 精度)
感覚⼊⼒ !
− log %('|))
精度重み付
予測誤差
"
+!())
シナプス重み
,-.. ./.-+0
∗
= − log % ' ) + 3"# 4 ) ' ||%())
精度重み付
予測誤差
(Accuracy)
事前信念の
影響
(Complexity)
⾃由エネルギーを最⼩化するためのパラメータ
・w → 学習
・x → 感覚の修正(⾏為の⽣成)
・q(z) → 知覚の修正(仮想知覚の⽣成)
・
!
"!
→ 感覚の精度
・
!
""
→ 事前信念の精度 + ) + /567.
#
*簡略化のため !周辺の負の対数尤度期待値計算は省略
%())
4()|')
事後信念
(予測)
事前信念
(予測)
注意](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-8-320.jpg)


![深層予測学習のフレームワーク
関節⾓度⼊⼒
深層学習
画像
エンコーダ
DCAE
関節⾓度予測
深層学習
画像
デコーダ
DCAE
関節
⾓度
指令値
予測画像
視野画像
⼊⼒
深層予測
学習器
LSTM,
MTRNN
時間ステップ
⼈間の操縦データ(スキル)
の収集(少量データ)
実時間で動作・画像の予測を修正し続ける
学習(世界モデル)
12
仮想の知覚
⾏為の修正
実画像
[P. Yang+, 2016]](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-12-320.jpg)


![ジッパー開け 2021.5 15
[H. Ichiwara+, ICRA2022] [H. Ito+, ICRA2022]](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-15-320.jpg)
![設計思想
1. 経験の学習(エクスペリエンス・ベースド)
¡ 運動と感覚を区別しない
¡ 「感覚ー>動作」のマップではなく,感覚運動
が⼀体化した”知覚”系列(経験)、内観を学習
2. “Multi-time scale”を扱う再帰結合型RNNの
階層予測構造
¡ 異なったレベル(時定数、次元)の予測
¡ トップダウンとボトムアップのインタラクション
3. “Symbol grounding”,実世界と記号世界
¡ 多義性,世界観の共有,創造性...
Slow Context
S-MTRNN
Sensory
Prediction
Fast Context
Sensory
Inputs
Higher-Level
Network
Lower-Level
Network
Variance
Prediction
Multi-Time scale RNN
[Y. Yamashita, J. Tani, 2008]
18](https://image.slidesharecdn.com/7thwbasymposium-ogata-221015043641-3c17be13/85/7-WBA-18-320.jpg)




![[DL輪読会]Object-Centric Learning with Slot Attention](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0717-200717023021-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]World Models](https://cdn.slidesharecdn.com/ss_thumbnails/20180427-180427003856-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination](https://cdn.slidesharecdn.com/ss_thumbnails/20200313furutav2-200313025657-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DL輪読会] マルチエージェント強化学習と心の理論](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai-211210044729-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)








































