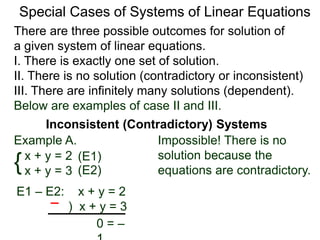
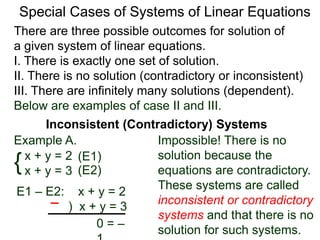
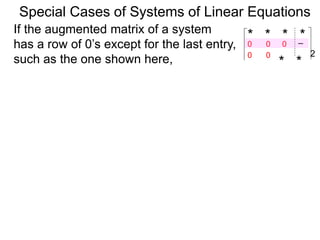
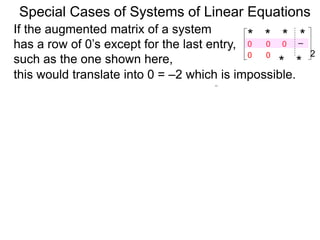
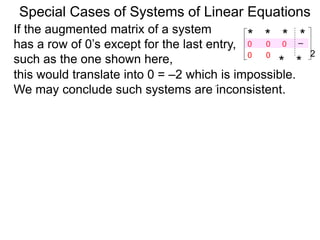
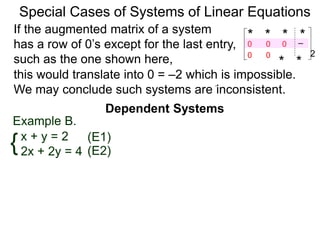
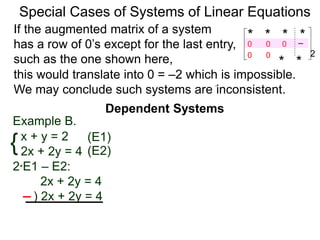
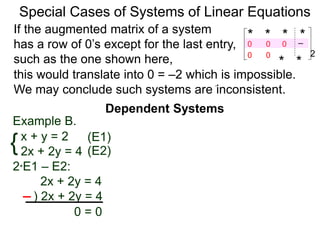
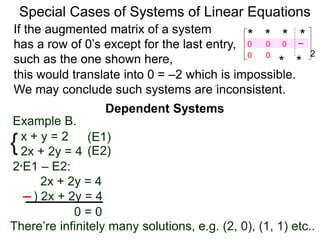
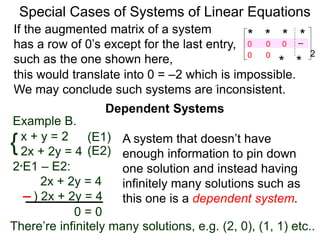
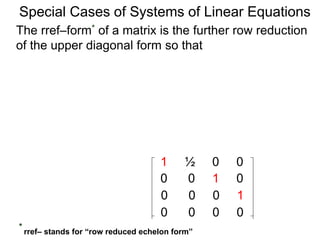
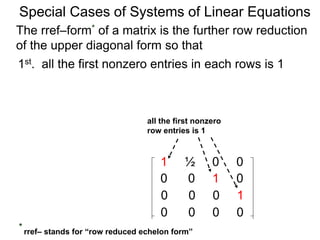
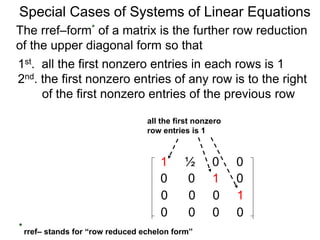
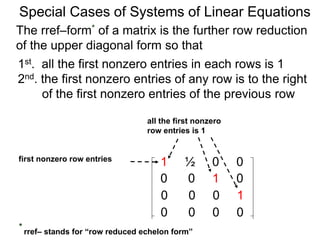
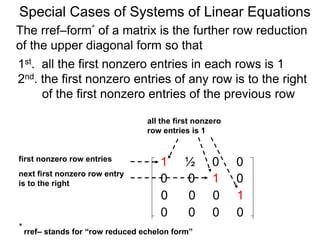
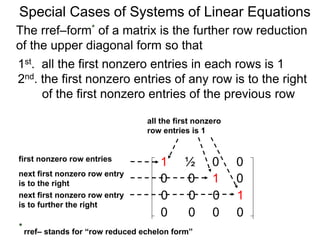
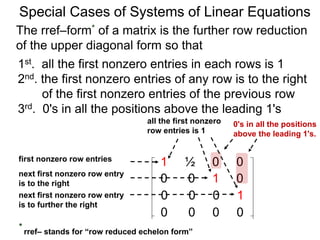
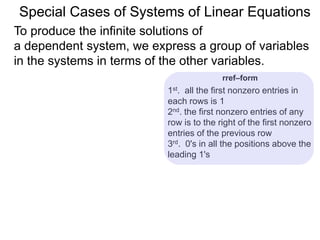
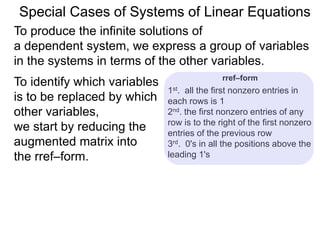
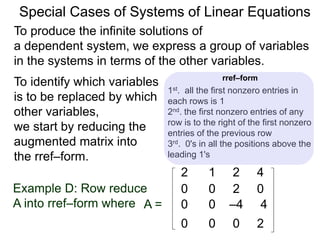
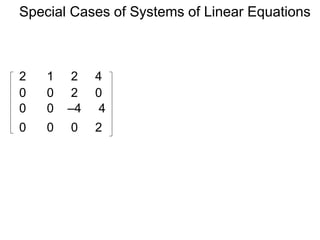
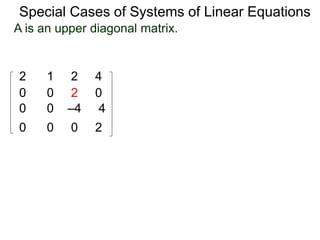
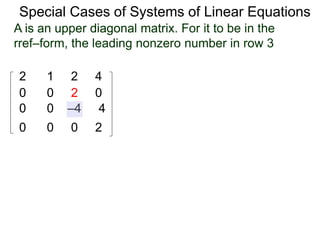
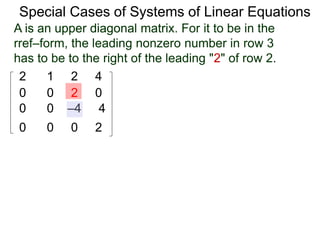
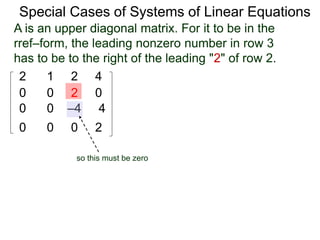
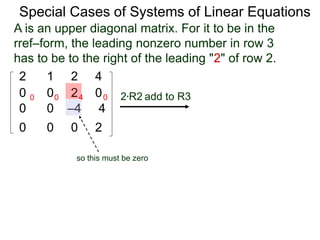
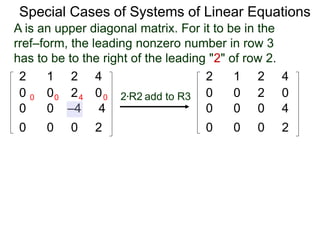
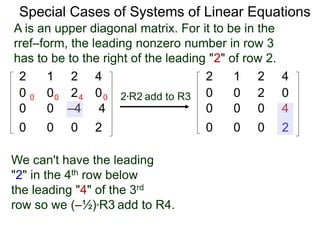
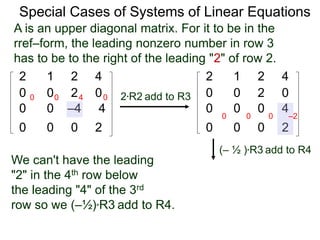
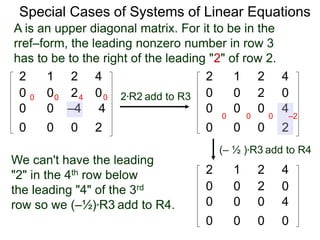
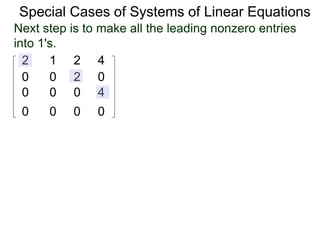
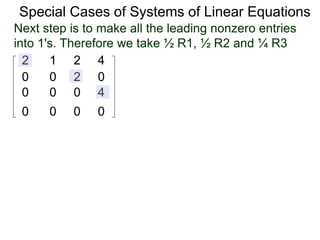
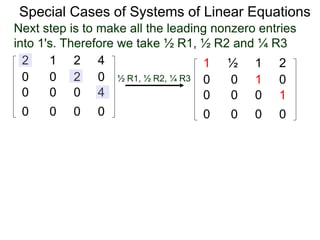
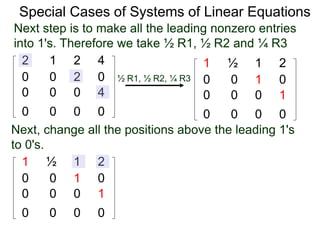
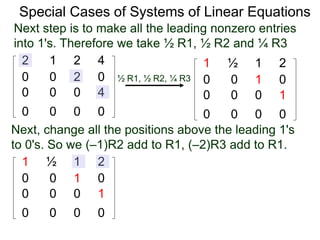
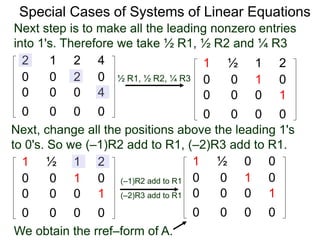
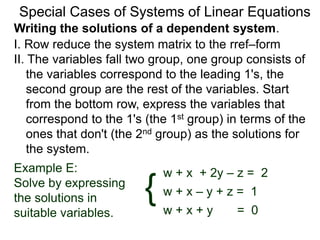
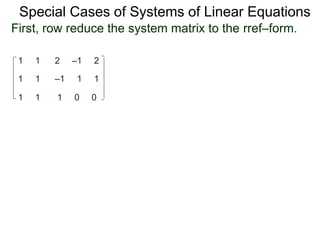
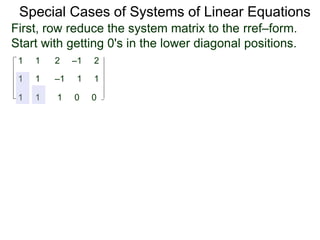
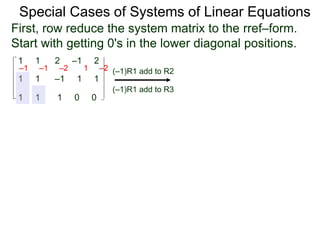
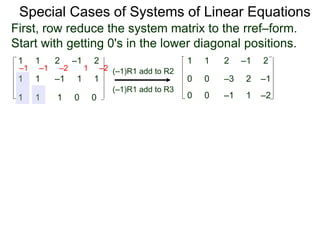
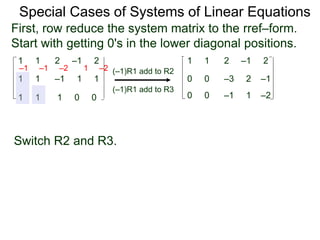
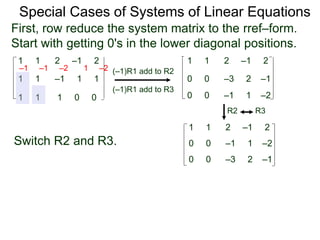
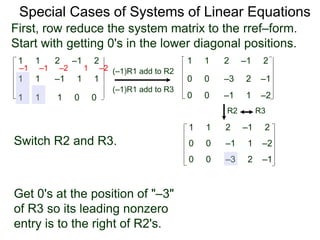
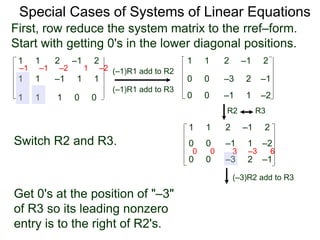
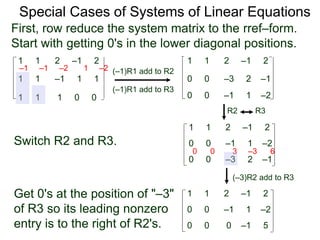
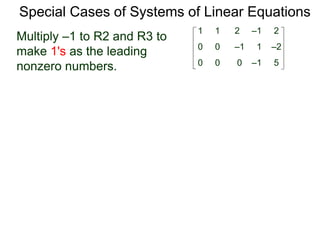
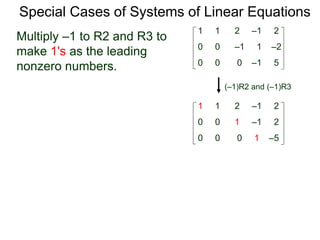
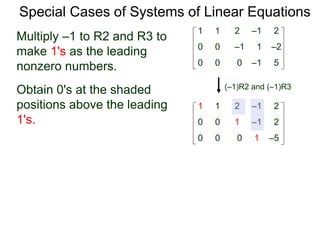
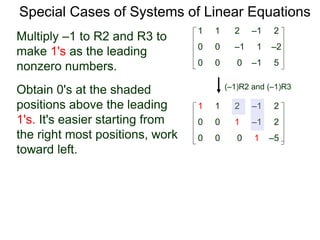
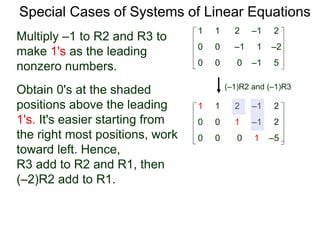
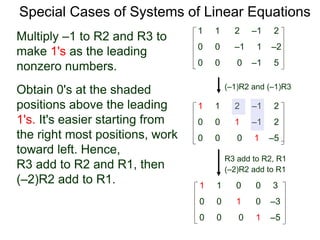
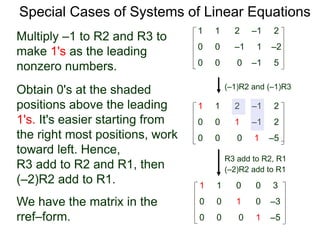
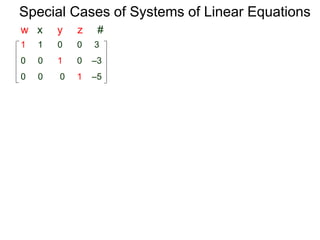
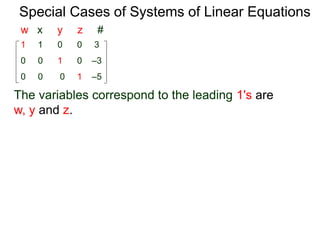
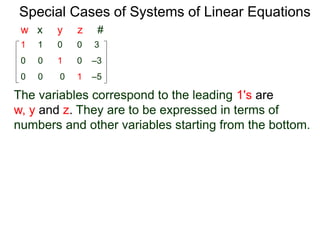
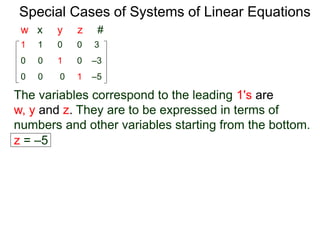
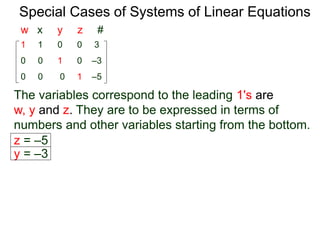
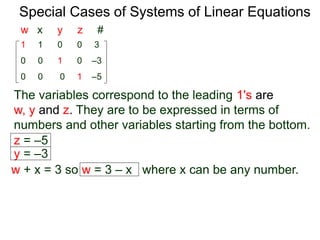
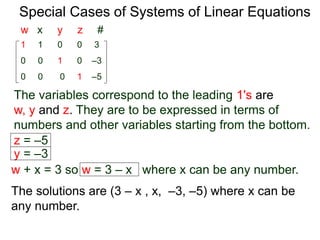
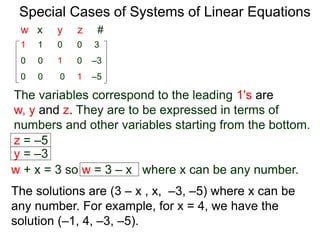
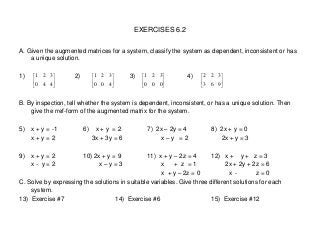
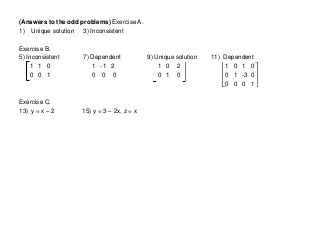
The document discusses special cases of systems of linear equations, including inconsistent/contradictory systems that have no solution, dependent systems that have infinitely many solutions, and the process of putting a system's augmented matrix into row-reduced echelon form (rref-form) to identify which type it is. It provides examples of an inconsistent system with equations x+y=2 and x+y=3, and a dependent system with equations x+y=2 and 2x+2y=4.
















































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

