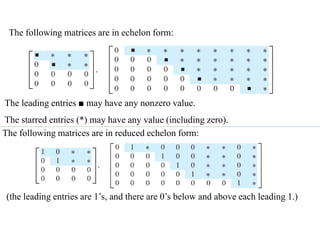
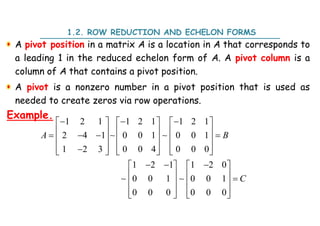
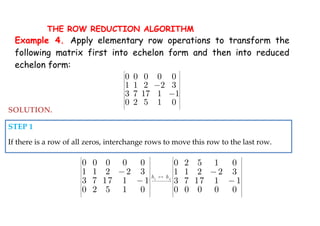
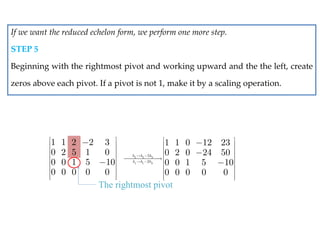
The document discusses systems of linear equations, defining linear equations and their solutions, and describing the conditions for consistency and equivalence of such systems. It covers various methods for solving linear systems, including graphing, substitution, elimination, and matrix methods. Additionally, the document introduces concepts of row reduction, echelon forms, and elementary row operations essential for simplifying matrices related to linear systems.
![1 2 3
1 2 3
2 3
2 0
2 4 6 4
3
x x x
x x x
x x
1 2 3
3
2 3
2 0
4 4
3
x x x
x
x x
1 2 3
3
2 3
2 0
1
3
x x x
x
x x
1 2 3
2 3
3
2 0
3
1
x x x
x x
x
1 2
2
3
2 1
2
1
x x
x
x
1
2
3
3
2
1
x
x
x
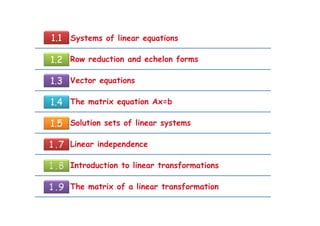
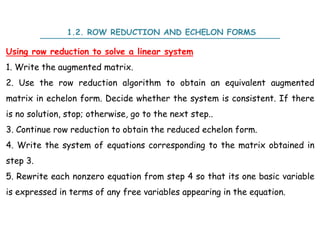
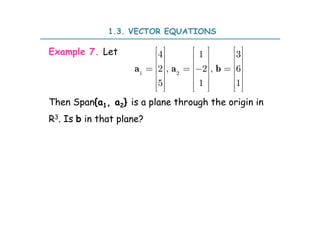
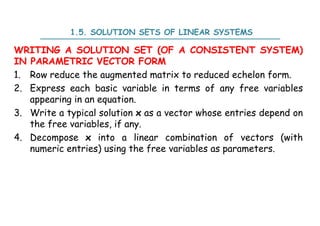
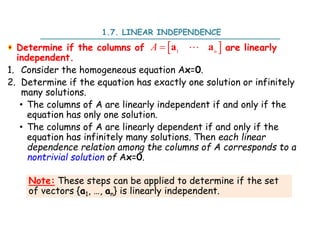
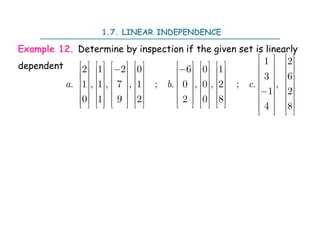
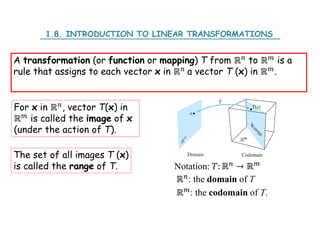
1.1. SYSTEMS OF LINEAR EQUATIONS
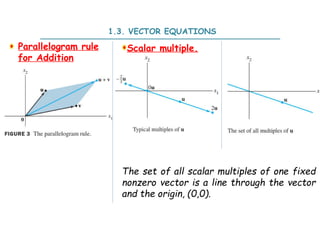
Example 2. Solve the linear system
Replace
[eq1] by
[eq1]-.[eq3]
Replace
[eq1]
by
[eq1]+
2.[eq2]
Replace
[eq2] by
[eq2]-2.[eq1]
Replace
[eq2] by
(1/4).[eq2]
Interchange
[eq2] and
[eq3]](https://image.slidesharecdn.com/slidechapter1st-230829124209-23f919e1/85/Slide_Chapter1_st-pdf-13-320.jpg)
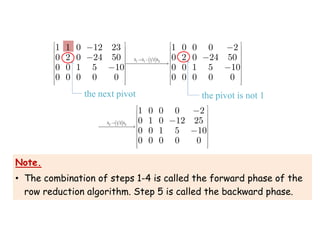
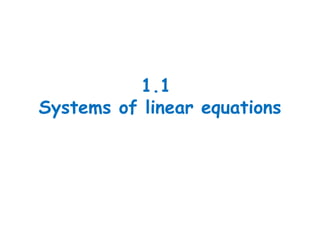
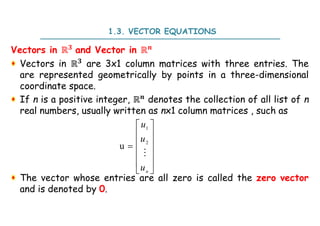
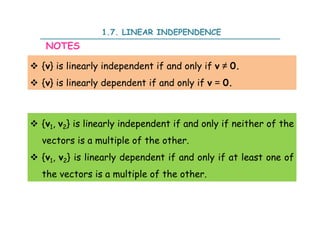
![Existence and Uniqueness Theorem
A linear system is consistent the rightmost column of the
augmented matrix is not a pivot column—that is, if and only if an
echelon form of the augmented matrix has no row of the form
[0 … 0 b] with b nonzero.
If a linear system is consistent, then the solution set contains
either (i) a unique solution, when there are no free variables, or (ii)
infinitely many solution, when there is at least one free variable.
THEOREM 2
1.2. ROW REDUCTION AND ECHELON FORMS](https://image.slidesharecdn.com/slidechapter1st-230829124209-23f919e1/85/Slide_Chapter1_st-pdf-31-320.jpg)
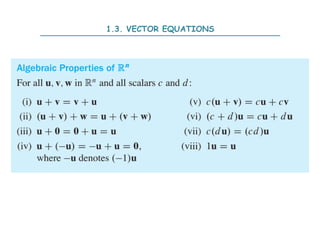


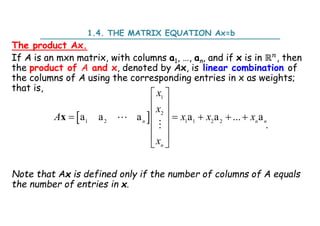

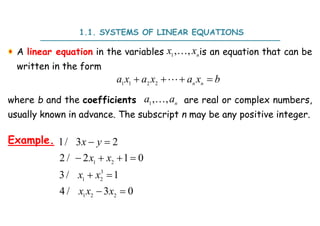
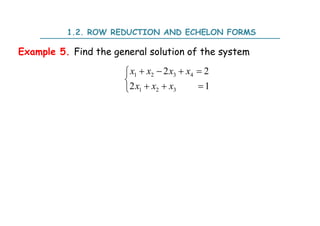
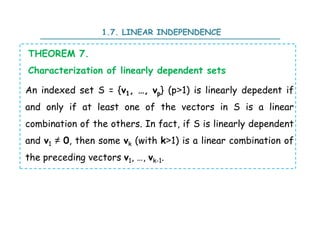
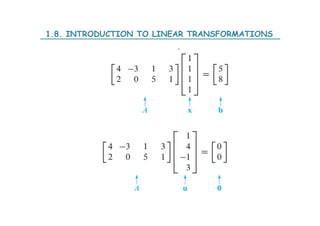
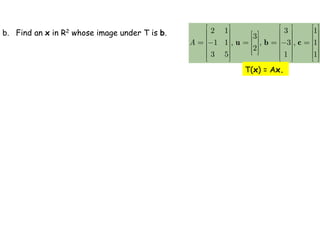
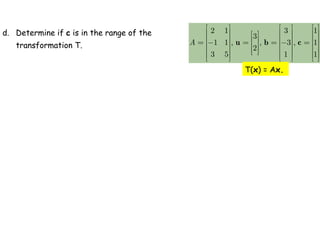
![If A is an × matrix, with columns a1, …, an, and if b is in ℝ , the
matrix equation
Ax = b
has the same solution set as the vector equation
+ + ⋯ + =
which, in turn, has the same solution set as the system of linear
equations whose augmented matrix is
[ … b]
THEOREM 3
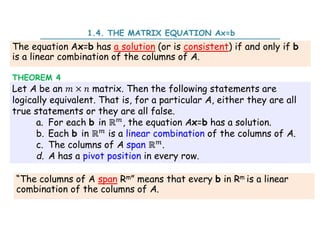
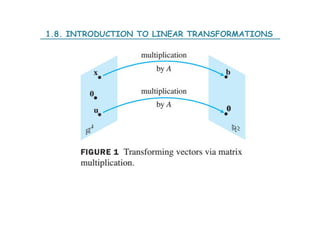
1.4. THE MATRIX EQUATION Ax=b](https://image.slidesharecdn.com/slidechapter1st-230829124209-23f919e1/85/Slide_Chapter1_st-pdf-50-320.jpg)






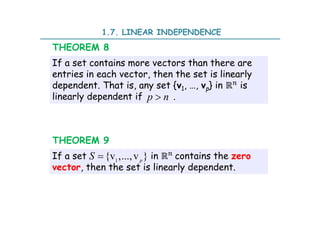
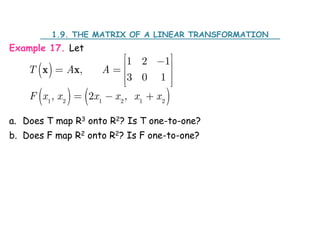
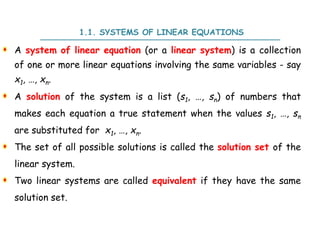
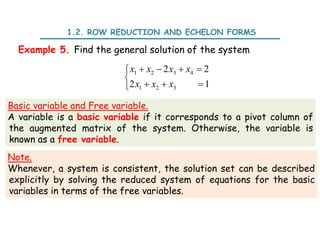
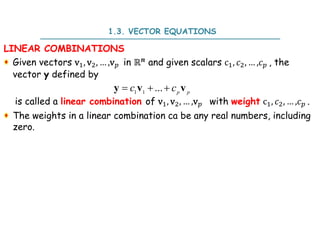
![1.9. THE MATRIX OF A LINEAR TRANSFORMATION
THEOREM 10.
Let T: Rn -> Rm be a linear transformation. Then there exists a unique
matrix A such that
T(x) = Ax for all x in Rn.
In fact, A is the m x n matrix whose k-th is the vector T(ek), where ek
is the k-th column of the identity matrix in Rn).
A = [T(e1) T(e2) …………. T(en)]
The matrix A is called the standard matrix for the linear
transformation T.
The nxn identity matrix In is (the identity matrix in Rn), is the nxn
matrix with 1’s on the diagonal and 0’s elsewhere.](https://image.slidesharecdn.com/slidechapter1st-230829124209-23f919e1/85/Slide_Chapter1_st-pdf-88-320.jpg)