Session_7_unit_II_system of linear algebraic equation
1.
Types of Solutionsof Systems
of Equations: Using Rank
Concept
Session - VII
2.
Content
• Introduction toSystems of Linear Equations
• Rank of a Matrix
• Consistency of Systems
• Types of Solutions Based on Rank
• Homogeneous and Non-homogeneous Systems
• Solved Examples
• Practice Problems
3.
Introduction to Systemsof Linear Equations
A system of linear equations is a collection of one or more linear equations involving
the same set of variables. In engineering applications, these systems appear
frequently when modeling physical phenomena, circuit analysis, structural mechanics,
and computer graphics.
The general form of a system of m linear equations in n unknowns can be written as:
In this module, we will explore how the concept of matrix rank determines the existence
and nature of solutions to such systems.
4.
Rank of aMatrix
The rank of a matrix is defined as the maximum number of linearly independent rows (or columns) in the matrix. It is a fundamental
concept that helps us understand the solution space of linear systems.
Definition
The rank of matrix A, denoted as ρ(A), is the order of the
largest non-zero minor in A, or equivalently, the dimension
of the row or column space of A.
Properties
• 0 ρ(A) min(m,n) for an m×n matrix A
≤ ≤
• ρ(A) = ρ(AT)
• Elementary row operations do not change the rank
For a system of linear equations, we consider two matrices:
• Coefficient Matrix (A): Matrix containing only the coefficients of variables
• Augmented Matrix (A|B): Coefficient matrix augmented with the constant terms
5.
Consistency of aSystem of Linear Equations
A system of linear equations is said to be consistent if it has at least one solution. Otherwise,
it is inconsistent.
Fundamental Theorem on Consistency
A system of linear equations is consistent if and only if the rank of the coefficient matrix equ
Mathematically:
If ρ(A) ≠ ρ(A|B), then ρ(A) < ρ(A|B), which means the system is inconsistent and has no solutio
This theorem provides a powerful tool for determining whether a system has solutions
without actually solving it.
6.
Types of SolutionsBased on Rank
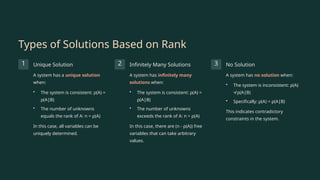
1 Unique Solution
A system has a unique solution
when:
• The system is consistent: ρ(A) =
ρ(A|B)
• The number of unknowns
equals the rank of A: n = ρ(A)
In this case, all variables can be
uniquely determined.
2 Infinitely Many Solutions
A system has infinitely many
solutions when:
• The system is consistent: ρ(A) =
ρ(A|B)
• The number of unknowns
exceeds the rank of A: n > ρ(A)
In this case, there are (n - ρ(A)) free
variables that can take arbitrary
values.
3 No Solution
A system has no solution when:
• The system is inconsistent: ρ(A)
≠ ρ(A|B)
• Specifically: ρ(A) < ρ(A|B)
This indicates contradictory
constraints in the system.
7.
Formula Summary: Typesof Solutions
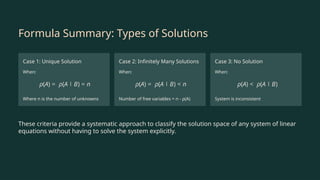
Case 1: Unique Solution
When:
Where n is the number of unknowns
Case 2: Infinitely Many Solutions
When:
Number of free variables = n - ρ(A)
Case 3: No Solution
When:
System is inconsistent
These criteria provide a systematic approach to classify the solution space of any system of linear
equations without having to solve the system explicitly.
8.
Homogeneous and Non-homogeneousSystems
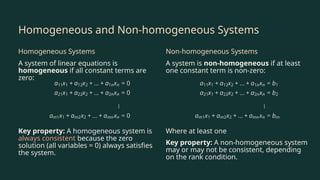
Homogeneous Systems
A system of linear equations is
homogeneous if all constant terms are
zero:
Key property: A homogeneous system is
always consistent because the zero
solution (all variables = 0) always satisfies
the system.
Non-homogeneous Systems
A system is non-homogeneous if at least
one constant term is non-zero:
Where at least one
Key property: A non-homogeneous system
may or may not be consistent, depending
on the rank condition.
9.
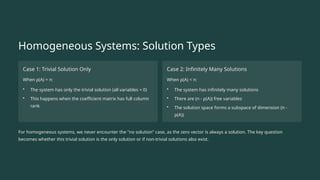
Homogeneous Systems: SolutionTypes
Case 1: Trivial Solution Only
When ρ(A) = n:
• The system has only the trivial solution (all variables = 0)
• This happens when the coefficient matrix has full column
rank
Case 2: Infinitely Many Solutions
When ρ(A) < n:
• The system has infinitely many solutions
• There are (n - ρ(A)) free variables
• The solution space forms a subspace of dimension (n -
ρ(A))
For homogeneous systems, we never encounter the "no solution" case, as the zero vector is always a solution. The key question
becomes whether this trivial solution is the only solution or if non-trivial solutions also exist.
10.
Solved Example 1:Unique Solution
Consider the system:
Step 1: Write the coefficient matrix A and augmented matrix (A|B)
Step 2: Calculate the ranks
Using row operations, we can show that ρ(A) = 3 and ρ(A|B) = 3
Step 3: Determine the solution type
Since ρ(A) = ρ(A|B) = n = 3, the system has a unique solution: x = 1, y = 1, z = 1
11.
Solved Example 2:Infinitely Many Solutions
Consider the system:
Step 1: Write the coefficient matrix A and augmented matrix (A|B)
Step 2: Calculate the ranks
Observe that the second row is 2 times the first row, and the third row is 3 times the first row.
So there is only one linearly independent row.
Therefore, ρ(A) = ρ(A|B) = 1
Step 3: Determine the solution type
Since ρ(A) = ρ(A|B) = 1 < n = 3, the system has infinitely many solutions with 2 free variables.
General solution: x = 6 - 2y - 3z, where y and z are free variables.
12.
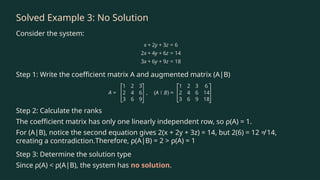
Solved Example 3:No Solution
Consider the system:
Step 1: Write the coefficient matrix A and augmented matrix (A|B)
Step 2: Calculate the ranks
The coefficient matrix has only one linearly independent row, so ρ(A) = 1.
For (A|B), notice the second equation gives 2(x + 2y + 3z) = 14, but 2(6) = 12 ≠ 14,
creating a contradiction.Therefore, ρ(A|B) = 2 > ρ(A) = 1
Step 3: Determine the solution type
Since ρ(A) < ρ(A|B), the system has no solution.
13.
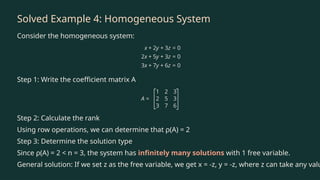
Solved Example 4:Homogeneous System
Consider the homogeneous system:
Step 1: Write the coefficient matrix A
Step 2: Calculate the rank
Using row operations, we can determine that ρ(A) = 2
Step 3: Determine the solution type
Since ρ(A) = 2 < n = 3, the system has infinitely many solutions with 1 free variable.
General solution: If we set z as the free variable, we get x = -z, y = -z, where z can take any valu
14.
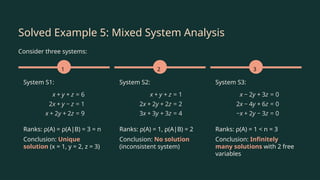
Solved Example 5:Mixed System Analysis
Consider three systems:
1
System S1:
Ranks: ρ(A) = ρ(A|B) = 3 = n
Conclusion: Unique
solution (x = 1, y = 2, z = 3)
2
System S2:
Ranks: ρ(A) = 1, ρ(A|B) = 2
Conclusion: No solution
(inconsistent system)
3
System S3:
Ranks: ρ(A) = 1 < n = 3
Conclusion: Infinitely
many solutions with 2 free
variables
15.
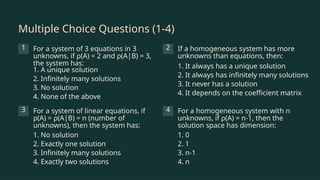
Multiple Choice Questions(1-4)
1 For a system of 3 equations in 3
unknowns, if ρ(A) = 2 and ρ(A|B) = 3,
the system has:
1. A unique solution
2. Infinitely many solutions
3. No solution
4. None of the above
2 If a homogeneous system has more
unknowns than equations, then:
1. It always has a unique solution
2. It always has infinitely many solutions
3. It never has a solution
4. It depends on the coefficient matrix
3 For a system of linear equations, if
ρ(A) = ρ(A|B) = n (number of
unknowns), then the system has:
1. No solution
2. Exactly one solution
3. Infinitely many solutions
4. Exactly two solutions
4 For a homogeneous system with n
unknowns, if ρ(A) = n-1, then the
solution space has dimension:
1. 0
2. 1
3. n-1
4. n
16.
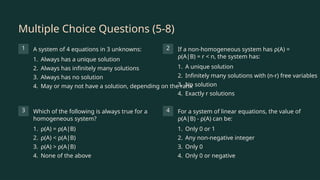
Multiple Choice Questions(5-8)
1 A system of 4 equations in 3 unknowns:
1. Always has a unique solution
2. Always has infinitely many solutions
3. Always has no solution
4. May or may not have a solution, depending on the rank
2 If a non-homogeneous system has ρ(A) =
ρ(A|B) = r < n, the system has:
1. A unique solution
2. Infinitely many solutions with (n-r) free variables
3. No solution
4. Exactly r solutions
3 Which of the following is always true for a
homogeneous system?
1. ρ(A) = ρ(A|B)
2. ρ(A) < ρ(A|B)
3. ρ(A) > ρ(A|B)
4. None of the above
4 For a system of linear equations, the value of
ρ(A|B) - ρ(A) can be:
1. Only 0 or 1
2. Any non-negative integer
3. Only 0
4. Only 0 or negative
17.
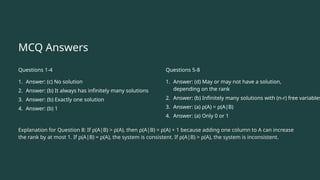
MCQ Answers
Questions 1-4
1.Answer: (c) No solution
2. Answer: (b) It always has infinitely many solutions
3. Answer: (b) Exactly one solution
4. Answer: (b) 1
Questions 5-8
1. Answer: (d) May or may not have a solution,
depending on the rank
2. Answer: (b) Infinitely many solutions with (n-r) free variables
3. Answer: (a) ρ(A) = ρ(A|B)
4. Answer: (a) Only 0 or 1
Explanation for Question 8: If ρ(A|B) > ρ(A), then ρ(A|B) = ρ(A) + 1 because adding one column to A can increase
the rank by at most 1. If ρ(A|B) = ρ(A), the system is consistent. If ρ(A|B) > ρ(A), the system is inconsistent.
18.
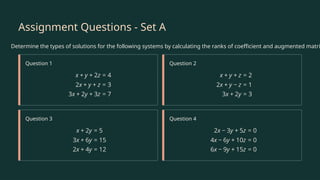
Assignment Questions -Set A
Determine the types of solutions for the following systems by calculating the ranks of coefficient and augmented matri
Question 1 Question 2
Question 3 Question 4
19.
Assignment Questions -Set B
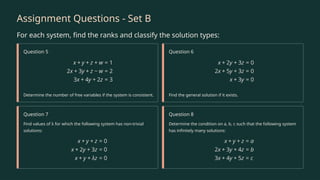
For each system, find the ranks and classify the solution types:
Question 5
Determine the number of free variables if the system is consistent.
Question 6
Find the general solution if it exists.
Question 7
Find values of λ for which the following system has non-trivial
solutions:
Question 8
Determine the condition on a, b, c such that the following system
has infinitely many solutions:
20.
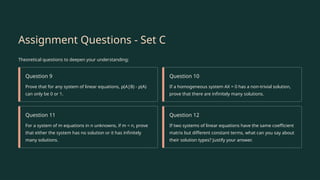
Assignment Questions -Set C
Theoretical questions to deepen your understanding:
Question 9
Prove that for any system of linear equations, ρ(A|B) - ρ(A)
can only be 0 or 1.
Question 10
If a homogeneous system AX = 0 has a non-trivial solution,
prove that there are infinitely many solutions.
Question 11
For a system of m equations in n unknowns, if m < n, prove
that either the system has no solution or it has infinitely
many solutions.
Question 12
If two systems of linear equations have the same coefficient
matrix but different constant terms, what can you say about
their solution types? Justify your answer.
21.
Practical Applications inEngineering
Electrical Circuits
Engineers use systems of linear equations
to analyze electrical circuits using
Kirchhoff's laws. The rank concept helps
determine if a unique solution exists for
finding currents or voltages.
Structural Analysis
When analyzing forces in trusses and
frames, engineers solve systems of
equations. The rank determines if the
structure is statically determinate (unique
solution) or indeterminate (infinitely many
solutions).
Computer Graphics
3D transformations involve solving systems
of equations. Understanding solution types
helps in determining whether unique
camera views or projections can be
computed.
Understanding the rank concept helps engineers recognize when problems have unique solutions, when they're under-constrained
(infinitely many solutions), or when they're over-constrained and potentially inconsistent (no solution).
22.
Computational Methods forFinding Rank
Several techniques can be used to determine the rank of a matrix:
Row Echelon Form (REF)
Transform the matrix to row echelon
form using elementary row operations.
The rank equals the number of non-
zero rows in the REF.
Reduced Row Echelon Form
(RREF)
Transform to RREF using Gauss-Jordan
elimination. The rank equals the
number of pivot positions (leading 1s)
in the RREF.
Determinant Method
For small matrices, check determinants
of increasingly larger submatrices. The
rank is the size of the largest non-zero
determinant.
In practice, numerical methods like Singular Value Decomposition (SVD) are preferred for computing rank, especially for large matrices
or when working with floating-point arithmetic where rounding errors can be significant.
23.
Common Pitfalls andMisconceptions
Confusing Rank Conditions
Students often mix up the conditions for
different solution types. Remember: ρ(A)
= ρ(A|B) = n means unique solution; ρ(A)
= ρ(A|B) < n means infinitely many
solutions; ρ(A) < ρ(A|B) means no
solution.
Incorrect Rank Calculations
When calculating rank, be careful with
row operations. A common mistake is
introducing dependencies through
arithmetic errors, leading to incorrect
rank determination.
Misinterpreting Free Variables
For systems with infinitely many
solutions, the number of free variables is
n - ρ(A), not just "some arbitrary
number." Each free variable creates a
dimension in the solution space.
Avoid these common errors by carefully working through examples and checking your answers with the theoretical principles.
24.
Summary: Rank andSolutions of Linear Systems
In this presentation, we've explored how the rank of matrices determines the types of solutions for systems of linear equations:
3
Key Concepts
• Rank as maximum number of linearly
independent rows/columns
• Relationship between coefficient and
augmented matrix ranks
• Classification of solution types based
on rank
3
Solution Types
• Unique solution: ρ(A) = ρ(A|B) = n
• Infinitely many solutions: ρ(A) = ρ(A|B)
< n
• No solution: ρ(A) < ρ(A|B)
2
System Categories
• Homogeneous systems (always
consistent)
• Non-homogeneous systems (may be
consistent or inconsistent)
Understanding these concepts is fundamental for engineering applications where systems of equations model physical phenomena,
electrical circuits, structural mechanics, and more. The rank approach provides a powerful analytical tool without requiring explicit
solutions.
25.
Thank You!
Types ofSolutions of Systems of Equations Using Rank Concept
We hope this presentation has helped clarify how the rank concept determines the existence and nature of solutions to systems of
linear equations. This knowledge forms an essential foundation for your engineering studies.
"Linear algebra is the language of modern engineering."
For further practice, complete the assignment questions and refer to your textbook for additional examples.
Best of luck with your studies!