Downloaded 16 times
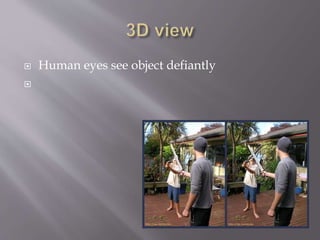
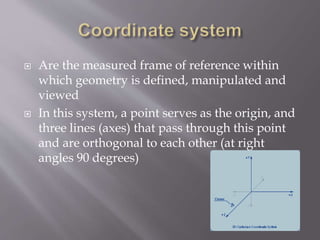

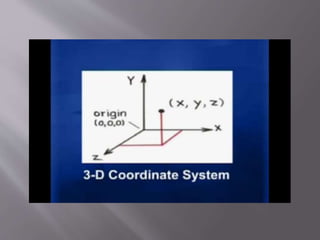
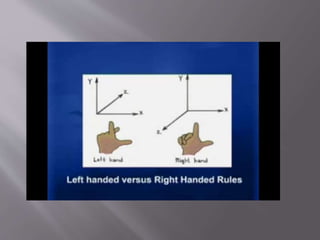
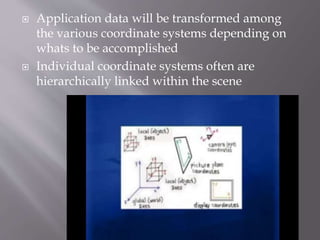
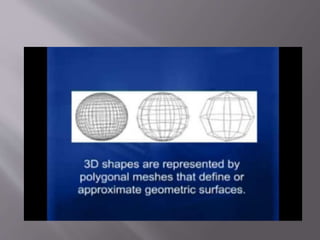

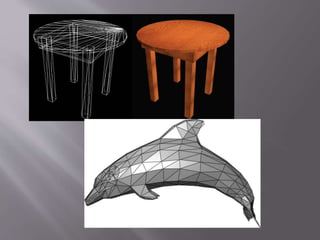

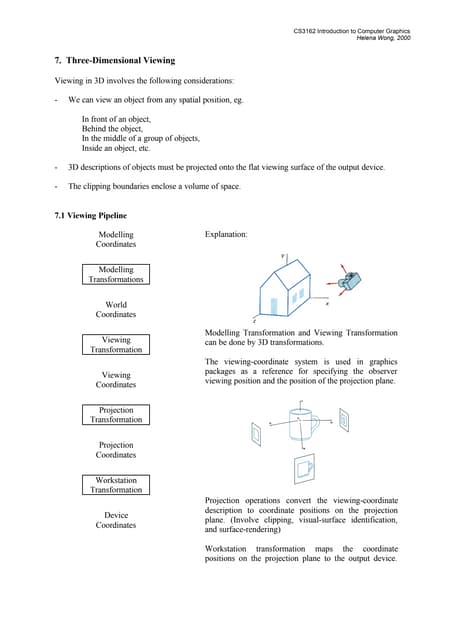
Human eyes perceive 3D projections in 2D. Coordinate systems including 1D, 2D, and 3D Cartesian systems define locations using reference points and orthogonal axes. 3D systems use x, y, and z coordinates to locate points and define geometries in space, including volumes like cubes and spheres. Coordinate transformations allow changing between reference frames.































































![20260201 [FOSDEM] gomodjail - library sandboxing for Go modules.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/20260201fosdemgomodjail-librarysandboxingforgomodules-260201225659-76609ec4-thumbnail.jpg?width=640&height=640&fit=bounds)















