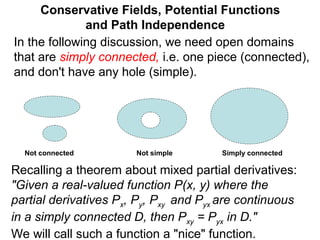
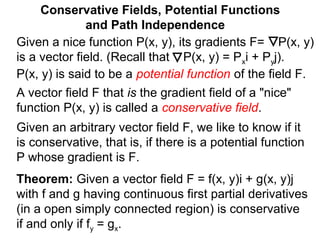
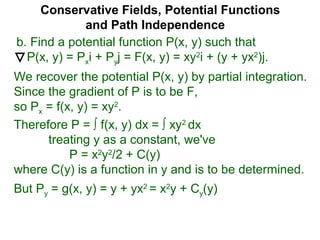
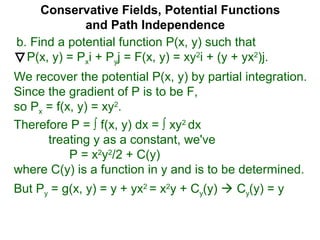
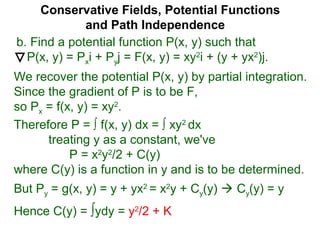
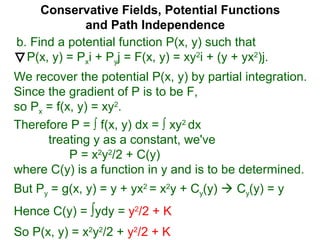
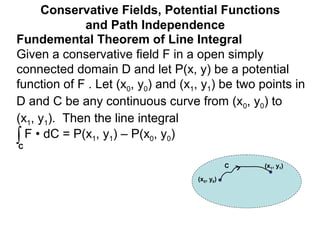
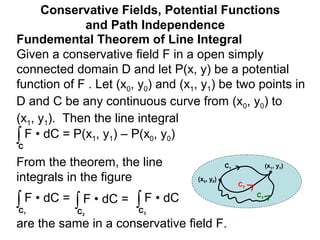
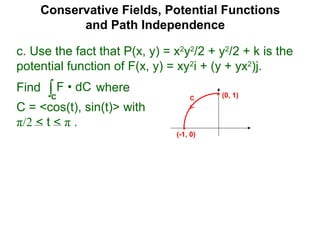
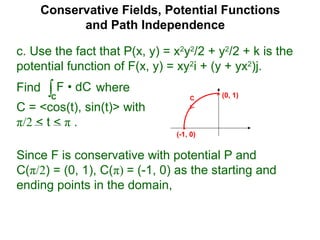
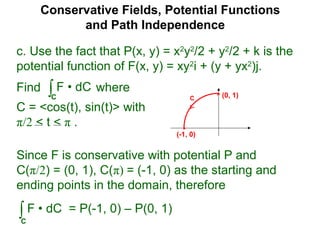
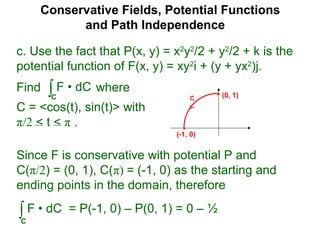
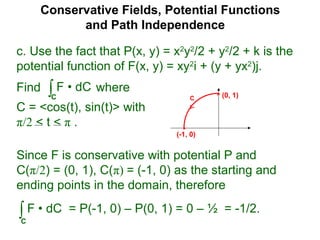
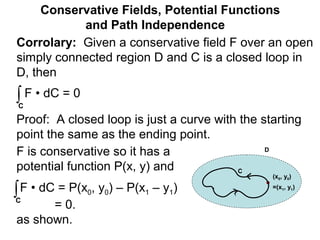
The document discusses conservative vector fields and potential functions. It defines a conservative field as one that is the gradient of a "nice" function, where the mixed partial derivatives are equal. A theorem is presented stating that a vector field F is conservative if and only if its partial derivatives satisfy fy = gx. An example shows a given vector field is conservative by verifying this condition. The potential function for the example field is then found by partial integration.