Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Kohei KaiGai
PDF, PPTX
1,051 views
20190926_Try_RHEL8_NVMEoF_Beta
RHEL8.0でNVME-oFを設定してみました。やってみた系。
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
6
/ 22
7
/ 22
8
/ 22
9
/ 22
10
/ 22
11
/ 22
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PPTX
「おうちクラウド」が今熱い!
by
Hirotaka Sato
PPTX
自宅インフラの育て方 第2回
by
富士通クラウドテクノロジーズ株式会社
PDF
AS45679 on FreeBSD
by
Tomocha Potter
PPT
virtio勉強会 #1 「virtioの基本的なところ(DRAFT版)」
by
Naoya Kaneko
PDF
JDK 16 で導入された JEP 396 にご注意!! (JJUG CCC 2021 Spring)
by
Yoshiro Tokumasu
PDF
【メモ】一般的に設計書に定義される項目例
by
Hirokazu Yatsunami
PDF
SMTPのSTARTTLSにおけるTLSバージョンについて
by
Sparx Systems Japan
PDF
ゼロからはじめるKVM超入門
by
VirtualTech Japan Inc.
「おうちクラウド」が今熱い!
by
Hirotaka Sato
自宅インフラの育て方 第2回
by
富士通クラウドテクノロジーズ株式会社
AS45679 on FreeBSD
by
Tomocha Potter
virtio勉強会 #1 「virtioの基本的なところ(DRAFT版)」
by
Naoya Kaneko
JDK 16 で導入された JEP 396 にご注意!! (JJUG CCC 2021 Spring)
by
Yoshiro Tokumasu
【メモ】一般的に設計書に定義される項目例
by
Hirokazu Yatsunami
SMTPのSTARTTLSにおけるTLSバージョンについて
by
Sparx Systems Japan
ゼロからはじめるKVM超入門
by
VirtualTech Japan Inc.
What's hot
PDF
単なるキャッシュじゃないよ!?infinispanの紹介
by
AdvancedTechNight
PPTX
【配信!Veeam情報局】バックアップ容量の最適化、ストレージ節約や拡張方法を解説!
by
株式会社クライム
PDF
10分でわかる Cilium と XDP / BPF
by
Shuji Yamada
PDF
NFVアプリケーションをOpenStack上で動かす為に - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
PPTX
SCUGJ第22回勉強会:オンプレのL2 NetworkをAzureに延伸? Azure Extended Network
by
wind06106
PDF
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
PPTX
スケールアウトするPostgreSQLを目指して!その第一歩!(NTTデータ テクノロジーカンファレンス 2020 発表資料)
by
NTT DATA Technology & Innovation
PDF
大規模ソーシャルゲームを支える技術~PHP+MySQLを使った高負荷対策~
by
infinite_loop
PPTX
CloudNativePGを動かしてみた! ~PostgreSQL on Kubernetes~(第34回PostgreSQLアンカンファレンス@オンライ...
by
NTT DATA Technology & Innovation
PDF
実践!DBベンチマークツールの使い方
by
Fujishiro Takuya
PPTX
NVMCT #1 ~今さら聞けないSSDの基本~
by
Fixstars Corporation
PPTX
ランサムウェア対策 ”最後の砦” データ保護からみる感染対策セミナー
by
株式会社クライム
PDF
分散トレーシング技術について(Open tracingやjaeger)
by
NTT Communications Technology Development
PDF
Zabbix最新情報 ~Zabbix 6.0に向けて~ @OSC2021 Online/Fall
by
Atsushi Tanaka
PDF
UnboundとNSDの紹介 BIND9との比較編
by
hdais
PDF
Nutanix運用指南術
by
Takahiro HAGIWARA
PPT
Cassandraのしくみ データの読み書き編
by
Yuki Morishita
PDF
DPDKによる高速コンテナネットワーキング
by
Tomoya Hibi
PDF
initramfsについて
by
Kazuhiro Nishiyama
PDF
DNSキャッシュサーバ チューニングの勘所
by
hdais
単なるキャッシュじゃないよ!?infinispanの紹介
by
AdvancedTechNight
【配信!Veeam情報局】バックアップ容量の最適化、ストレージ節約や拡張方法を解説!
by
株式会社クライム
10分でわかる Cilium と XDP / BPF
by
Shuji Yamada
NFVアプリケーションをOpenStack上で動かす為に - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
SCUGJ第22回勉強会:オンプレのL2 NetworkをAzureに延伸? Azure Extended Network
by
wind06106
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
スケールアウトするPostgreSQLを目指して!その第一歩!(NTTデータ テクノロジーカンファレンス 2020 発表資料)
by
NTT DATA Technology & Innovation
大規模ソーシャルゲームを支える技術~PHP+MySQLを使った高負荷対策~
by
infinite_loop
CloudNativePGを動かしてみた! ~PostgreSQL on Kubernetes~(第34回PostgreSQLアンカンファレンス@オンライ...
by
NTT DATA Technology & Innovation
実践!DBベンチマークツールの使い方
by
Fujishiro Takuya
NVMCT #1 ~今さら聞けないSSDの基本~
by
Fixstars Corporation
ランサムウェア対策 ”最後の砦” データ保護からみる感染対策セミナー
by
株式会社クライム
分散トレーシング技術について(Open tracingやjaeger)
by
NTT Communications Technology Development
Zabbix最新情報 ~Zabbix 6.0に向けて~ @OSC2021 Online/Fall
by
Atsushi Tanaka
UnboundとNSDの紹介 BIND9との比較編
by
hdais
Nutanix運用指南術
by
Takahiro HAGIWARA
Cassandraのしくみ データの読み書き編
by
Yuki Morishita
DPDKによる高速コンテナネットワーキング
by
Tomoya Hibi
initramfsについて
by
Kazuhiro Nishiyama
DNSキャッシュサーバ チューニングの勘所
by
hdais
Similar to 20190926_Try_RHEL8_NVMEoF_Beta
PPTX
自宅でもできる!! VCF9 x ONTAP Select NVMe over TCPと 小話
by
shomayama0221
PDF
Red Hat ストレージ製品
by
Takuya Utsunomiya
PDF
Osdt_osca_ceph_20160706
by
Takehiro Kudou
PDF
20210731_OSC_Kyoto_PGStrom3.0
by
Kohei KaiGai
PPTX
分散ストレージ技術Cephの最新情報
by
Emma Haruka Iwao
PDF
141030ceph
by
OSSラボ株式会社
PDF
How to use Ceph RBD as CloudStack Primary Storage
by
Kimihiko Kitase
PPTX
自宅でもできる!! VCF構築 -実践編- ラボで遭遇したエラーたちを添えて
by
shomayama0221
PDF
2013OSC関西@京都_CloudStackとCloudFoundaryがまるわかり!
by
Midori Oge
PDF
自宅でもできる!! VCF9 "評価の最終日まで遊んで得たまとめ"_Japan VMUG vExpert が語る #51
by
shomayama0221
PPTX
自宅でも出来る!!VCF構築-概要編-JapanVMUG Spring Meeting with NEC
by
shomayama0221
PDF
昨今のストレージ選定のポイントとCephStorageの特徴
by
Takuya Utsunomiya
PDF
OpenNebula on Ubuntu
by
autumnalsky
PDF
Kernel ext4
by
Kai Sasaki
PPT
Open VZ
by
Kazuaki Fujikura
ODP
「前回の COMSTAR ネタに刺激されてしまったので、オレも COMSTAR を使ってみた。」(仮)
by
Kazuyuki Sato
PPTX
PFIセミナーH271022 ~コマンドを叩いて遊ぶ コンテナ仮想、その裏側~
by
Preferred Networks
PDF
Red Hat OpenShift Container Storage
by
Takuya Utsunomiya
PDF
フルオープンソースでここまで出来る。OpenStackの構築と運用
by
Ikuo Kumagai
PDF
openstack+cephインテグレーション
by
OSSラボ株式会社
自宅でもできる!! VCF9 x ONTAP Select NVMe over TCPと 小話
by
shomayama0221
Red Hat ストレージ製品
by
Takuya Utsunomiya
Osdt_osca_ceph_20160706
by
Takehiro Kudou
20210731_OSC_Kyoto_PGStrom3.0
by
Kohei KaiGai
分散ストレージ技術Cephの最新情報
by
Emma Haruka Iwao
141030ceph
by
OSSラボ株式会社
How to use Ceph RBD as CloudStack Primary Storage
by
Kimihiko Kitase
自宅でもできる!! VCF構築 -実践編- ラボで遭遇したエラーたちを添えて
by
shomayama0221
2013OSC関西@京都_CloudStackとCloudFoundaryがまるわかり!
by
Midori Oge
自宅でもできる!! VCF9 "評価の最終日まで遊んで得たまとめ"_Japan VMUG vExpert が語る #51
by
shomayama0221
自宅でも出来る!!VCF構築-概要編-JapanVMUG Spring Meeting with NEC
by
shomayama0221
昨今のストレージ選定のポイントとCephStorageの特徴
by
Takuya Utsunomiya
OpenNebula on Ubuntu
by
autumnalsky
Kernel ext4
by
Kai Sasaki
Open VZ
by
Kazuaki Fujikura
「前回の COMSTAR ネタに刺激されてしまったので、オレも COMSTAR を使ってみた。」(仮)
by
Kazuyuki Sato
PFIセミナーH271022 ~コマンドを叩いて遊ぶ コンテナ仮想、その裏側~
by
Preferred Networks
Red Hat OpenShift Container Storage
by
Takuya Utsunomiya
フルオープンソースでここまで出来る。OpenStackの構築と運用
by
Ikuo Kumagai
openstack+cephインテグレーション
by
OSSラボ株式会社
More from Kohei KaiGai
PDF
20221116_DBTS_PGStrom_History
by
Kohei KaiGai
PDF
20221111_JPUG_CustomScan_API
by
Kohei KaiGai
PDF
20211112_jpugcon_gpu_and_arrow
by
Kohei KaiGai
PDF
20210928_pgunconf_hll_count
by
Kohei KaiGai
PDF
20210511_PGStrom_GpuCache
by
Kohei KaiGai
PDF
20210301_PGconf_Online_GPU_PostGIS_GiST_Index
by
Kohei KaiGai
PDF
20201128_OSC_Fukuoka_Online_GPUPostGIS
by
Kohei KaiGai
PDF
20201113_PGconf_Japan_GPU_PostGIS
by
Kohei KaiGai
PDF
20201006_PGconf_Online_Large_Data_Processing
by
Kohei KaiGai
PDF
20200828_OSCKyoto_Online
by
Kohei KaiGai
PDF
20200806_PGStrom_PostGIS_GstoreFdw
by
Kohei KaiGai
PDF
20200424_Writable_Arrow_Fdw
by
Kohei KaiGai
PDF
20191211_Apache_Arrow_Meetup_Tokyo
by
Kohei KaiGai
PDF
20191115-PGconf.Japan
by
Kohei KaiGai
PDF
20190925_DBTS_PGStrom
by
Kohei KaiGai
PDF
20190909_PGconf.ASIA_KaiGai
by
Kohei KaiGai
PDF
20190516_DLC10_PGStrom
by
Kohei KaiGai
PDF
20190418_PGStrom_on_ArrowFdw
by
Kohei KaiGai
PDF
20190314 PGStrom Arrow_Fdw
by
Kohei KaiGai
PDF
20181212 - PGconfASIA - LT - English
by
Kohei KaiGai
20221116_DBTS_PGStrom_History
by
Kohei KaiGai
20221111_JPUG_CustomScan_API
by
Kohei KaiGai
20211112_jpugcon_gpu_and_arrow
by
Kohei KaiGai
20210928_pgunconf_hll_count
by
Kohei KaiGai
20210511_PGStrom_GpuCache
by
Kohei KaiGai
20210301_PGconf_Online_GPU_PostGIS_GiST_Index
by
Kohei KaiGai
20201128_OSC_Fukuoka_Online_GPUPostGIS
by
Kohei KaiGai
20201113_PGconf_Japan_GPU_PostGIS
by
Kohei KaiGai
20201006_PGconf_Online_Large_Data_Processing
by
Kohei KaiGai
20200828_OSCKyoto_Online
by
Kohei KaiGai
20200806_PGStrom_PostGIS_GstoreFdw
by
Kohei KaiGai
20200424_Writable_Arrow_Fdw
by
Kohei KaiGai
20191211_Apache_Arrow_Meetup_Tokyo
by
Kohei KaiGai
20191115-PGconf.Japan
by
Kohei KaiGai
20190925_DBTS_PGStrom
by
Kohei KaiGai
20190909_PGconf.ASIA_KaiGai
by
Kohei KaiGai
20190516_DLC10_PGStrom
by
Kohei KaiGai
20190418_PGStrom_on_ArrowFdw
by
Kohei KaiGai
20190314 PGStrom Arrow_Fdw
by
Kohei KaiGai
20181212 - PGconfASIA - LT - English
by
Kohei KaiGai
20190926_Try_RHEL8_NVMEoF_Beta
1.
Red Hat Enterprise
Linux 8.0 で NVME-over-Fabricを設定してみた HeteroDB Chief Architect & CEO KaiGai Kohei <kaigai@heterodb.com> #やってみた系
2.
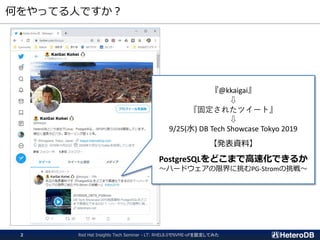
何をやってる人ですか? 『@kkaigai』 ⇩ 『固定されたツイート』 ⇩ 9/25(水) DB Tech
Showcase Tokyo 2019 【発表資料】 PostgreSQLをどこまで高速化できるか ~ハードウェアの限界に挑むPG-Stromの挑戦~ Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた2
3.
みんな大好き NVME-SSD Red Hat
Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた3
4.
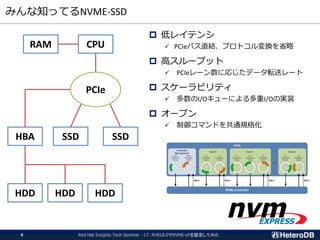
みんな知ってるNVME-SSD 低レイテンシ ✓ PCIeバス直結、プロトコル変換を省略
高スループット ✓ PCIeレーン数に応じたデータ転送レート スケーラビリティ ✓ 多数のI/Oキューによる多重I/Oの実装 オープン ✓ 制御コマンドを共通規格化 CPURAM SSD SSD PCIe HBA HDD HDD HDD Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた4
5.
ストレージ容量の上限はシャーシの大きさに規定される…? イマドキの2Uサーバなら、オールフラッシュで200TB近く積めるが…。 model Supermicro 2029U-TN24R4T
Qty CPU Intel Xeon Gold 6226 (12C, 2.7GHz) 2 RAM 32GB RDIMM (DDR4-2933, ECC) 12 GPU NVIDIA Tesla P40 (3840C, 24GB) 2 HDD Seagate 1.0TB SATA (7.2krpm) 1 NVME Intel DC P4510 (8.0TB, U.2) 24 N/W built-in 10GBase-T 4 8.0TB x 24 = 192TB Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた5 システム導入時に、 データサイズの上限を 正確に予想できるか…?
6.
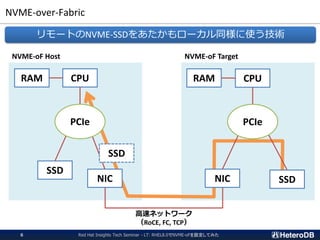
NVME-over-Fabric リモートのNVME-SSDをあたかもローカル同様に使う技術 CPURAM SSD NIC PCIe SSD NIC SSD CPURAM PCIe NVME-oF Host
NVME-oF Target 高速ネットワーク (RoCE, FC, TCP) Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた6
7.
#やってみた Red Hat Insights
Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた7
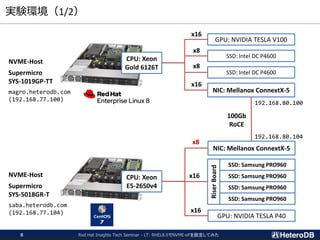
8.
実験環境(1/2) NVME-Host Supermicro SYS-1019GP-TT magro.heterodb.com (192.168.77.100) NVME-Host Supermicro SYS-5018GR-T saba.heterodb.com (192.168.77.104) CPU: Xeon Gold 6126T CPU:
Xeon E5-2650v4 GPU: NVIDIA TESLA V100 SSD: Intel DC P4600 SSD: Intel DC P4600 NIC: Mellanox ConnextX-5 NIC: Mellanox ConnextX-5 GPU: NVIDIA TESLA P40 x16 x8 x8 x16 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 RiserBoard x16 x16 x8 192.168.80.100 192.168.80.104 100Gb RoCE Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた8
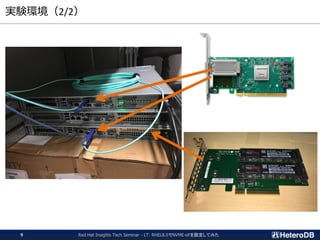
9.
実験環境(2/2) Red Hat Insights
Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた9
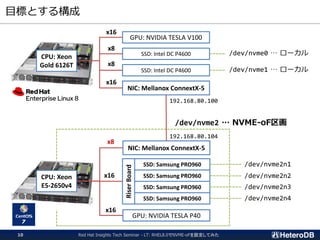
10.
目標とする構成 CPU: Xeon Gold 6126T CPU:
Xeon E5-2650v4 GPU: NVIDIA TESLA V100 SSD: Intel DC P4600 SSD: Intel DC P4600 NIC: Mellanox ConnextX-5 NIC: Mellanox ConnextX-5 GPU: NVIDIA TESLA P40 x16 x8 x8 x16 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 RiserBoard x16 x16 x8 192.168.80.100 192.168.80.104 /dev/nvme0 … ローカル /dev/nvme1 … ローカル /dev/nvme2 … NVME-oF区画 /dev/nvme2n1 /dev/nvme2n2 /dev/nvme2n3 /dev/nvme2n4 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた10
11.
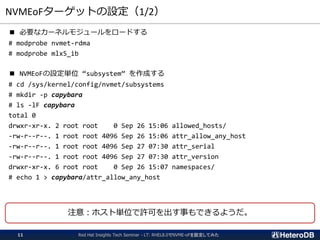
NVMEoFターゲットの設定(1/2) ■ 必要なカーネルモジュールをロードする # modprobe
nvmet-rdma # modprobe mlx5_ib ■ NVMEoFの設定単位 “subsystem” を作成する # cd /sys/kernel/config/nvmet/subsystems # mkdir -p capybara # ls -lF capybara total 0 drwxr-xr-x. 2 root root 0 Sep 26 15:06 allowed_hosts/ -rw-r--r--. 1 root root 4096 Sep 26 15:06 attr_allow_any_host -rw-r--r--. 1 root root 4096 Sep 27 07:30 attr_serial -rw-r--r--. 1 root root 4096 Sep 27 07:30 attr_version drwxr-xr-x. 6 root root 0 Sep 26 15:07 namespaces/ # echo 1 > capybara/attr_allow_any_host Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた11 注意:ホスト単位で許可を出す事もできるようだ。
12.
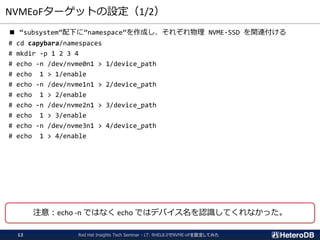
NVMEoFターゲットの設定(1/2) ■ “subsystem”配下に”namespace”を作成し、それぞれ物理 NVME-SSD
を関連付ける # cd capybara/namespaces # mkdir -p 1 2 3 4 # echo -n /dev/nvme0n1 > 1/device_path # echo 1 > 1/enable # echo -n /dev/nvme1n1 > 2/device_path # echo 1 > 2/enable # echo -n /dev/nvme2n1 > 3/device_path # echo 1 > 3/enable # echo -n /dev/nvme3n1 > 4/device_path # echo 1 > 4/enable Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた12 注意:echo -n ではなく echo ではデバイス名を認識してくれなかった。
13.
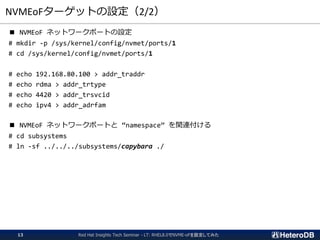
NVMEoFターゲットの設定(2/2) ■ NVMEoF ネットワークポートの設定 #
mkdir -p /sys/kernel/config/nvmet/ports/1 # cd /sys/kernel/config/nvmet/ports/1 # echo 192.168.80.100 > addr_traddr # echo rdma > addr_trtype # echo 4420 > addr_trsvcid # echo ipv4 > addr_adrfam ■ NVMEoF ネットワークポートと “namespace” を関連付ける # cd subsystems # ln -sf ../../../subsystems/capybara ./ Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた13
14.
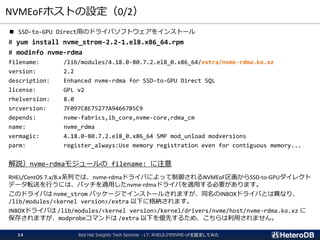
NVMEoFホストの設定(0/2) ■ SSD-to-GPU Direct用のドライバソフトウェアをインストール #
yum install nvme_strom-2.2-1.el8.x86_64.rpm # modinfo nvme-rdma filename: /lib/modules/4.18.0-80.7.2.el8_0.x86_64/extra/nvme-rdma.ko.xz version: 2.2 description: Enhanced nvme-rdma for SSD-to-GPU Direct SQL license: GPL v2 rhelversion: 8.0 srcversion: 7F097CBE75277A94667B5C9 depends: nvme-fabrics,ib_core,nvme-core,rdma_cm name: nvme_rdma vermagic: 4.18.0-80.7.2.el8_0.x86_64 SMP mod_unload modversions parm: register_always:Use memory registration even for contiguous memory... 解説)nvme-rdmaモジュールの filename: に注意 RHEL/CentOS 7.x/8.x系列では、nvme-rdmaドライバによって制御されるNVMEoF区画からSSD-to-GPUダイレクト データ転送を行うには、パッチを適用したnvme-rdmaドライバを適用する必要があります。 このドライバは nvme_strom パッケージでインストールされますが、同名のINBOXドライバとは異なり、 /lib/modules/<kernel version>/extra 以下に格納されます。 INBOXドライバは /lib/modules/<kernel version>/kernel/drivers/nvme/host/nvme-rdma.ko.xz に 保存されますが、modprobeコマンドは /extra 以下を優先するため、こちらは利用されません。 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた14
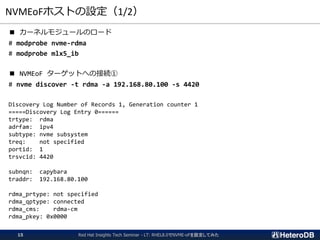
15.
NVMEoFホストの設定(1/2) ■ カーネルモジュールのロード # modprobe
nvme-rdma # modprobe mlx5_ib ■ NVMEoF ターゲットへの接続① # nvme discover -t rdma -a 192.168.80.100 -s 4420 Discovery Log Number of Records 1, Generation counter 1 =====Discovery Log Entry 0====== trtype: rdma adrfam: ipv4 subtype: nvme subsystem treq: not specified portid: 1 trsvcid: 4420 subnqn: capybara traddr: 192.168.80.100 rdma_prtype: not specified rdma_qptype: connected rdma_cms: rdma-cm rdma_pkey: 0x0000 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた15
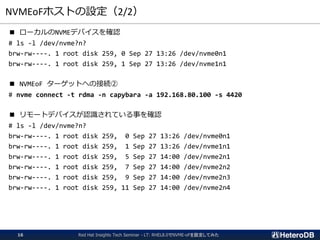
16.
NVMEoFホストの設定(2/2) ■ ローカルのNVMEデバイスを確認 # ls
-l /dev/nvme?n? brw-rw----. 1 root disk 259, 0 Sep 27 13:26 /dev/nvme0n1 brw-rw----. 1 root disk 259, 1 Sep 27 13:26 /dev/nvme1n1 ■ NVMEoF ターゲットへの接続② # nvme connect -t rdma -n capybara -a 192.168.80.100 -s 4420 ■ リモートデバイスが認識されている事を確認 # ls -l /dev/nvme?n? brw-rw----. 1 root disk 259, 0 Sep 27 13:26 /dev/nvme0n1 brw-rw----. 1 root disk 259, 1 Sep 27 13:26 /dev/nvme1n1 brw-rw----. 1 root disk 259, 5 Sep 27 14:00 /dev/nvme2n1 brw-rw----. 1 root disk 259, 7 Sep 27 14:00 /dev/nvme2n2 brw-rw----. 1 root disk 259, 9 Sep 27 14:00 /dev/nvme2n3 brw-rw----. 1 root disk 259, 11 Sep 27 14:00 /dev/nvme2n4 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた16
17.
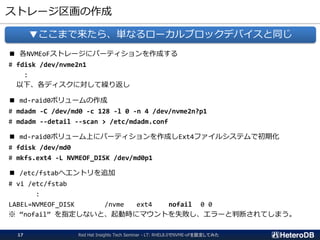
ストレージ区画の作成 Red Hat Insights
Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた17 ■ 各NVMEoFストレージにパーティションを作成する # fdisk /dev/nvme2n1 : 以下、各ディスクに対して繰り返し ■ md-raid0ボリュームの作成 # mdadm -C /dev/md0 -c 128 -l 0 -n 4 /dev/nvme2n?p1 # mdadm --detail --scan > /etc/mdadm.conf ■ md-raid0ボリューム上にパーティションを作成しExt4ファイルシステムで初期化 # fdisk /dev/md0 # mkfs.ext4 -L NVMEOF_DISK /dev/md0p1 ■ /etc/fstabへエントリを追加 # vi /etc/fstab : LABEL=NVMEOF_DISK /nvme ext4 nofail 0 0 ※ “nofail” を指定しないと、起動時にマウントを失敗し、エラーと判断されてしまう。 ▼ここまで来たら、単なるローカルブロックデバイスと同じ
18.
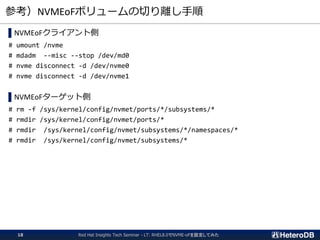
参考)NVMEoFボリュームの切り離し手順 ▌NVMEoFクライアント側 # umount /nvme #
mdadm --misc --stop /dev/md0 # nvme disconnect -d /dev/nvme0 # nvme disconnect -d /dev/nvme1 ▌NVMEoFターゲット側 # rm -f /sys/kernel/config/nvmet/ports/*/subsystems/* # rmdir /sys/kernel/config/nvmet/ports/* # rmdir /sys/kernel/config/nvmet/subsystems/*/namespaces/* # rmdir /sys/kernel/config/nvmet/subsystems/* Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた18
19.
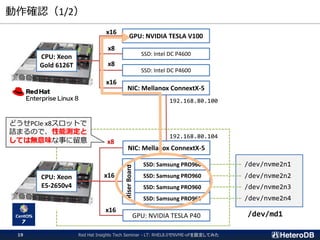
動作確認(1/2) CPU: Xeon Gold 6126T CPU:
Xeon E5-2650v4 GPU: NVIDIA TESLA V100 SSD: Intel DC P4600 SSD: Intel DC P4600 NIC: Mellanox ConnextX-5 NIC: Mellanox ConnextX-5 GPU: NVIDIA TESLA P40 x16 x8 x8 x16 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 SSD: Samsung PRO960 RiserBoard x16 x16 x8 192.168.80.100 192.168.80.104 /dev/md1 /dev/nvme2n1 /dev/nvme2n2 /dev/nvme2n3 /dev/nvme2n4 どうせPCIe x8スロットで 詰まるので、性能測定と しては無意味な事に留意 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた19
20.
動作確認(2/2) ▌リモートNVME-SSD ➔ 100G-NIC
➔ 100G-NIC ➔ ローカルGPU # ssd2gpu_test /mnt/90GB GPU[0] Tesla P40 - file: /mnt/90GB, i/o size: 86.02GB, buffer 32MB x 6 read: 86.02GB, time: 13.91sec, throughput: 6.18GB/s nr_ram2gpu: 0, nr_ssd2gpu: 22548480, average DMA size: 128.0KB ▌iostat -m 2 avg-cpu: %user %nice %system %iowait %steal %idle 0.00 0.00 2.72 0.00 0.00 97.28 Device tps MB_read/s MB_wrtn/s MB_read MB_wrtn nvme0n1 0.00 0.00 0.00 0 0 nvme1n1 0.00 0.00 0.00 0 0 nvme2n1 12679.50 1584.94 0.00 3169 0 nvme2n2 12679.50 1584.88 0.00 3169 0 nvme2n3 12682.00 1584.94 0.00 3169 0 md126 50719.50 6339.56 0.00 12679 0 nvme2n4 12681.00 1585.12 0.00 3170 0 Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた20
21.
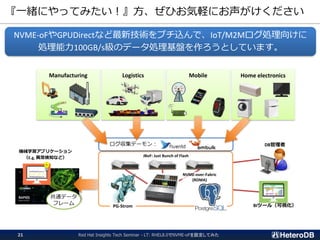
ログ収集デーモン: 『一緒にやってみたい!』方、ぜひお気軽にお声がけください Red Hat Insights
Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた21 NVME-oFやGPUDirectなど最新技術をブチ込んで、IoT/M2Mログ処理向けに 処理能力100GB/s級のデータ処理基盤を作ろうとしています。 Manufacturing Logistics Mobile Home electronics JBoF: Just Bunch of Flash NVME-over-Fabric (RDMA) DB管理者 BIツール(可視化) 機械学習アプリケーション (E.g, 異常検知など) 共通データ フレーム PG-Strom
Download





![動作確認(2/2)
▌リモートNVME-SSD ➔ 100G-NIC ➔ 100G-NIC ➔ ローカルGPU
# ssd2gpu_test /mnt/90GB
GPU[0] Tesla P40 - file: /mnt/90GB, i/o size: 86.02GB, buffer 32MB x 6
read: 86.02GB, time: 13.91sec, throughput: 6.18GB/s
nr_ram2gpu: 0, nr_ssd2gpu: 22548480, average DMA size: 128.0KB
▌iostat -m 2
avg-cpu: %user %nice %system %iowait %steal %idle
0.00 0.00 2.72 0.00 0.00 97.28
Device tps MB_read/s MB_wrtn/s MB_read MB_wrtn
nvme0n1 0.00 0.00 0.00 0 0
nvme1n1 0.00 0.00 0.00 0 0
nvme2n1 12679.50 1584.94 0.00 3169 0
nvme2n2 12679.50 1584.88 0.00 3169 0
nvme2n3 12682.00 1584.94 0.00 3169 0
md126 50719.50 6339.56 0.00 12679 0
nvme2n4 12681.00 1585.12 0.00 3170 0
Red Hat Insights Tech Seminar - LT: RHEL8.0でNVME-oFを設定してみた20](https://image.slidesharecdn.com/20190926rhel8ltnvmeof-190927101928/85/20190926_Try_RHEL8_NVMEoF_Beta-20-320.jpg)