Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
株式会社 NTTテクノクロス
PDF, PPTX
3,901 views
OpenStack入門 2016/06/10
2016年6月10日 LPI-Japanと共催しました、「OpenStackってなに?ゼロから始めるOpenStack入門セミナー」にて、NTTソフトウェアが講演した資料です
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 51
2
/ 51
3
/ 51
4
/ 51
5
/ 51
6
/ 51
7
/ 51
8
/ 51
9
/ 51
10
/ 51
11
/ 51
12
/ 51
13
/ 51
14
/ 51
15
/ 51
16
/ 51
17
/ 51
18
/ 51
19
/ 51
20
/ 51
21
/ 51
22
/ 51
23
/ 51
24
/ 51
25
/ 51
26
/ 51
27
/ 51
28
/ 51
29
/ 51
30
/ 51
31
/ 51
32
/ 51
33
/ 51
34
/ 51
35
/ 51
36
/ 51
37
/ 51
38
/ 51
39
/ 51
40
/ 51
41
/ 51
42
/ 51
43
/ 51
44
/ 51
45
/ 51
46
/ 51
47
/ 51
48
/ 51
49
/ 51
50
/ 51
51
/ 51
More Related Content
PDF
OpenStackクラウド基盤構築ハンズオンセミナー 第1日:講義No1
by
Etsuji Nakai
PDF
OpenStack勉強会
by
Yuki Obara
PDF
OpenStack入門 2016/06/27
by
株式会社 NTTテクノクロス
PDF
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
PDF
Pacemakerを使いこなそう
by
Takatoshi Matsuo
PPTX
OpenStack マルチノード環境構築
by
HommasSlide
PDF
ML2/OVN アーキテクチャ概観
by
Yamato Tanaka
PDF
OpenStackトラブルシューティング入門
by
VirtualTech Japan Inc.
OpenStackクラウド基盤構築ハンズオンセミナー 第1日:講義No1
by
Etsuji Nakai
OpenStack勉強会
by
Yuki Obara
OpenStack入門 2016/06/27
by
株式会社 NTTテクノクロス
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
Pacemakerを使いこなそう
by
Takatoshi Matsuo
OpenStack マルチノード環境構築
by
HommasSlide
ML2/OVN アーキテクチャ概観
by
Yamato Tanaka
OpenStackトラブルシューティング入門
by
VirtualTech Japan Inc.
What's hot
PDF
OpenStackによる、実践オンプレミスクラウド
by
Masanori Itoh
PDF
日本OpenStackユーザ会 第37回勉強会
by
Yushiro Furukawa
PDF
第20回 OpenStack勉強会 Neutron Deep Dive - DVR
by
Toru Makabe
PDF
IOS/IOS-XE 運用管理機能アップデート
by
シスコシステムズ合同会社
PDF
本当にあったApache Spark障害の話
by
x1 ichi
PDF
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
PDF
昨今のストレージ選定のポイントとCephStorageの特徴
by
Takuya Utsunomiya
PDF
Openv switchの使い方とか
by
kotto_hihihi
PDF
Linux KVMではじめるカンタン仮想化入門
by
VirtualTech Japan Inc.
PDF
OpenStack超入門シリーズ Novaのディスク周りあれこれ
by
Toru Makabe
PPTX
Ceph and Openstack in a Nutshell
by
Karan Singh
PDF
OpenStackでも重要な役割を果たすPacemakerを知ろう!
by
ksk_ha
PDF
OpenStackで始めるクラウド環境構築入門(Horizon 基礎編)
by
VirtualTech Japan Inc.
PDF
Docker道場「Dockerの基本概念」0825インフラ勉強会資料
by
Masahito Zembutsu
PDF
大規模環境のOpenStack アップグレードの考え方と実施のコツ
by
Tomoya Hashimoto
PDF
Apache Hadoop YARNとマルチテナントにおけるリソース管理
by
Cloudera Japan
PPTX
Zabbix による ms sql監視 ~データベースモニタリング~ odbc
by
真乙 九龍
PPTX
OVN 設定サンプル | OVN config example 2015/12/27
by
Kentaro Ebisawa
PDF
IPv4/IPv6 移行・共存技術の動向
by
Yuya Rin
PDF
[D35] インメモリーデータベース徹底比較 by Komori
by
Insight Technology, Inc.
OpenStackによる、実践オンプレミスクラウド
by
Masanori Itoh
日本OpenStackユーザ会 第37回勉強会
by
Yushiro Furukawa
第20回 OpenStack勉強会 Neutron Deep Dive - DVR
by
Toru Makabe
IOS/IOS-XE 運用管理機能アップデート
by
シスコシステムズ合同会社
本当にあったApache Spark障害の話
by
x1 ichi
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
昨今のストレージ選定のポイントとCephStorageの特徴
by
Takuya Utsunomiya
Openv switchの使い方とか
by
kotto_hihihi
Linux KVMではじめるカンタン仮想化入門
by
VirtualTech Japan Inc.
OpenStack超入門シリーズ Novaのディスク周りあれこれ
by
Toru Makabe
Ceph and Openstack in a Nutshell
by
Karan Singh
OpenStackでも重要な役割を果たすPacemakerを知ろう!
by
ksk_ha
OpenStackで始めるクラウド環境構築入門(Horizon 基礎編)
by
VirtualTech Japan Inc.
Docker道場「Dockerの基本概念」0825インフラ勉強会資料
by
Masahito Zembutsu
大規模環境のOpenStack アップグレードの考え方と実施のコツ
by
Tomoya Hashimoto
Apache Hadoop YARNとマルチテナントにおけるリソース管理
by
Cloudera Japan
Zabbix による ms sql監視 ~データベースモニタリング~ odbc
by
真乙 九龍
OVN 設定サンプル | OVN config example 2015/12/27
by
Kentaro Ebisawa
IPv4/IPv6 移行・共存技術の動向
by
Yuya Rin
[D35] インメモリーデータベース徹底比較 by Komori
by
Insight Technology, Inc.
Viewers also liked
PDF
いまさら聞けないOpen stack
by
Hayato Otsuka
PDF
実用段階に入ったOpenStack ~ もうすぐ絶滅するというPrivate Cloudの多様性について ~
by
Rakuten Group, Inc.
PDF
OpenStack 最新動向 2016/11
by
Akira Yoshiyama
PDF
OpenStackをさらに”使う”技術 概要と基礎操作
by
irix_jp
PDF
WebRTC研修
by
株式会社 NTTテクノクロス
PDF
OpenStack超入門シリーズ いまさら聞けないSwiftの使い方
by
Toru Makabe
PDF
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
PDF
仮想化専門コンサルタントが教える「成功するエンタープライズクラウド環境構のポイント」
by
VirtualTech Japan Inc.
PDF
ガチで聞く!ヤフーのOpenStackプライベート・クラウドの実態とは
by
Brocade
PDF
OpenStack最新動向 2016/2
by
Akira Yoshiyama
PDF
Red Hat Enterprise Linux OpenStack Platform環境でのDocker活用テクニック
by
Etsuji Nakai
PDF
Red Hat Enterprise Linux OpenStack Platform 7 - VM Instance HA Architecture
by
Etsuji Nakai
PPTX
Open stack界でのコンテナの現状
by
株式会社 NTTテクノクロス
PDF
OpenStack Trove 技術解説
by
Toru Makabe
PDF
ネットワークスイッチ構築実践 1.VLAN・LinkAggregation編
by
株式会社 NTTテクノクロス
PDF
ネットワークエンジニアはどこでウデマエをみがくのか?
by
Yuya Rin
PDF
Androidアプリケーション開発中級研修 後編
by
株式会社 NTTテクノクロス
PPTX
OpenStackユーザ会資料 - Masakari
by
masahito12
PDF
Osc cloud2012 open_stackabstract
by
Ayumi Oka
PDF
ネットワークスイッチ構築実践 2.STP・RSTP・PortSecurity・StormControl・SPAN・Stacking編
by
株式会社 NTTテクノクロス
いまさら聞けないOpen stack
by
Hayato Otsuka
実用段階に入ったOpenStack ~ もうすぐ絶滅するというPrivate Cloudの多様性について ~
by
Rakuten Group, Inc.
OpenStack 最新動向 2016/11
by
Akira Yoshiyama
OpenStackをさらに”使う”技術 概要と基礎操作
by
irix_jp
WebRTC研修
by
株式会社 NTTテクノクロス
OpenStack超入門シリーズ いまさら聞けないSwiftの使い方
by
Toru Makabe
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
仮想化専門コンサルタントが教える「成功するエンタープライズクラウド環境構のポイント」
by
VirtualTech Japan Inc.
ガチで聞く!ヤフーのOpenStackプライベート・クラウドの実態とは
by
Brocade
OpenStack最新動向 2016/2
by
Akira Yoshiyama
Red Hat Enterprise Linux OpenStack Platform環境でのDocker活用テクニック
by
Etsuji Nakai
Red Hat Enterprise Linux OpenStack Platform 7 - VM Instance HA Architecture
by
Etsuji Nakai
Open stack界でのコンテナの現状
by
株式会社 NTTテクノクロス
OpenStack Trove 技術解説
by
Toru Makabe
ネットワークスイッチ構築実践 1.VLAN・LinkAggregation編
by
株式会社 NTTテクノクロス
ネットワークエンジニアはどこでウデマエをみがくのか?
by
Yuya Rin
Androidアプリケーション開発中級研修 後編
by
株式会社 NTTテクノクロス
OpenStackユーザ会資料 - Masakari
by
masahito12
Osc cloud2012 open_stackabstract
by
Ayumi Oka
ネットワークスイッチ構築実践 2.STP・RSTP・PortSecurity・StormControl・SPAN・Stacking編
by
株式会社 NTTテクノクロス
Similar to OpenStack入門 2016/06/10
PDF
OpenStack概要
by
Akira Yoshiyama
PDF
Okinawa Open Days 2014 OpenStackハンズオンセミナー / OpenStackの機能概要
by
Etsuji Nakai
PDF
OSC2013 Tokyo Spring OpenStack Overview
by
irix_jp
PDF
OpenStack 向けネットワーク入門
by
Dell TechCenter Japan
PPTX
OpenStack最新動向と構築のポイント - EMC様セミナー 「あなたのビジネスを高速化! OpenStackが実現する戦略的なクラウドインフラ」
by
Nobuyuki Tamaoki
PDF
Open stack概要とよくある議論
by
shintaro mizuno
PDF
H26第1回 沖縄オープンラボラトリ・ハンズオンセミナー:OpenStack入門
by
Etsuji Nakai
PDF
そろそろビジネスに貢献するSDNを考えませんか?~キーワードは“オープン”~
by
Brocade
PDF
OpenStack Vancouver Summit Report presented at nttgroup meeting in Japanese
by
Toshikazu Ichikawa
PDF
「hbstudy#23 OpenStack祭!!」資料 ~OpenStackプロジェクトの全体像~
by
Masanori Itoh
PDF
OpenCloudCampus : Cloud Technologies Meeting (OpenStack)
by
Masanori Itoh
PDF
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
PDF
Open stack nova_austin報告書
by
Yasuhiro Arai
PPTX
OpenStack管理者入門 - OpenStack最新情報セミナー 2014年12月
by
VirtualTech Japan Inc.
PDF
おぷ☆すたあど彼
by
samemoon
PDF
Miracle Linux seminer Hatohol and ConoHa
by
Naoto Gohko
PDF
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
PPTX
クラウド環境におけるオープンソースウェアの現状について、OpenStackを中心に
by
VirtualTech Japan Inc.
PDF
OpenStack, Hadoop -- OSSクラウドの最新動向
by
Masanori Itoh
PDF
データセンター進化論:SDNは今オープンに ~攻めるITインフラにの絶対条件とは?~
by
Brocade
OpenStack概要
by
Akira Yoshiyama
Okinawa Open Days 2014 OpenStackハンズオンセミナー / OpenStackの機能概要
by
Etsuji Nakai
OSC2013 Tokyo Spring OpenStack Overview
by
irix_jp
OpenStack 向けネットワーク入門
by
Dell TechCenter Japan
OpenStack最新動向と構築のポイント - EMC様セミナー 「あなたのビジネスを高速化! OpenStackが実現する戦略的なクラウドインフラ」
by
Nobuyuki Tamaoki
Open stack概要とよくある議論
by
shintaro mizuno
H26第1回 沖縄オープンラボラトリ・ハンズオンセミナー:OpenStack入門
by
Etsuji Nakai
そろそろビジネスに貢献するSDNを考えませんか?~キーワードは“オープン”~
by
Brocade
OpenStack Vancouver Summit Report presented at nttgroup meeting in Japanese
by
Toshikazu Ichikawa
「hbstudy#23 OpenStack祭!!」資料 ~OpenStackプロジェクトの全体像~
by
Masanori Itoh
OpenCloudCampus : Cloud Technologies Meeting (OpenStack)
by
Masanori Itoh
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
Open stack nova_austin報告書
by
Yasuhiro Arai
OpenStack管理者入門 - OpenStack最新情報セミナー 2014年12月
by
VirtualTech Japan Inc.
おぷ☆すたあど彼
by
samemoon
Miracle Linux seminer Hatohol and ConoHa
by
Naoto Gohko
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
クラウド環境におけるオープンソースウェアの現状について、OpenStackを中心に
by
VirtualTech Japan Inc.
OpenStack, Hadoop -- OSSクラウドの最新動向
by
Masanori Itoh
データセンター進化論:SDNは今オープンに ~攻めるITインフラにの絶対条件とは?~
by
Brocade
More from 株式会社 NTTテクノクロス
PPTX
ブロックチェーン活用事例
by
株式会社 NTTテクノクロス
PDF
ネットワーク構築訓練 入門
by
株式会社 NTTテクノクロス
PDF
Androidテスティング実践3 ユニットテスト・CI編
by
株式会社 NTTテクノクロス
PDF
Androidテスティング実践2 システムテスト編
by
株式会社 NTTテクノクロス
PDF
Androidテスティング実践 基礎編
by
株式会社 NTTテクノクロス
PDF
Androidアプリケーション開発中級研修 前編
by
株式会社 NTTテクノクロス
ブロックチェーン活用事例
by
株式会社 NTTテクノクロス
ネットワーク構築訓練 入門
by
株式会社 NTTテクノクロス
Androidテスティング実践3 ユニットテスト・CI編
by
株式会社 NTTテクノクロス
Androidテスティング実践2 システムテスト編
by
株式会社 NTTテクノクロス
Androidテスティング実践 基礎編
by
株式会社 NTTテクノクロス
Androidアプリケーション開発中級研修 前編
by
株式会社 NTTテクノクロス
OpenStack入門 2016/06/10
1.
Copyright© 2016 NTT
Software Corporation OpenStack入門 OpenStackってなに?ゼロから始めるOpenStack入門セミナー 2016/06/10 NTT ソフトウェア株式会社 クラウド&セキュリティ事業部
2.
Copyright© 2016 NTT
Software Corporation 2 【著作権・免責事項】 • 本セミナーコースの内容、本資料のすべての著作権は、NTTソフトウェア株式会社に帰属します。 • 無断での本資料の複写、複製、再利用、転載、転用を禁じます。 • 本資料は、NTTソフトウェア株式会社から保証なしに提供されます。 • 本資料に記載されている会社名および製品名は、一般に各社の商標または登録商標です。
3.
Copyright© 2016 NTT
Software Corporation 4 目次 1. 講師紹介&弊社紹介 2. OpenStackとは何か? 3. 世の中の動向 4. OpenStack導入のメリット・デメリット 5. 質疑応答 6. OpenStack入門 各コンポーネントの役割、できること 1. Horizon( Web GUI ) 2. Keystone ( 認証 ) 3. Glance ( イメージ ) 4. Neutron ( ネットワーク , ルーター) 5. Nova (インスタンス ) 6. Cinder ( ボリューム ) 7. OpenStackの本格導入へ向けて 8. 質疑応答 40分 30分 5分
4.
Copyright© 2016 NTT
Software Corporation 5 弊社紹介 NTTソフトウェア株式会社 • 社員数1,463名(2016年3月末現在) • OpenStackエンジニア⇒およそ100人 • OpenStackに関する主な活動 • 2012年 Essex版からNTT研究所と共に活動開始 • OpenStackの検証 • NTTG会社にOpenStackを導入するために必要な独自機能の開発 • OpenStackベースのプライベートクラウド構築 • 保守運用、監視サポート • サービス展開に向けたコンサルティング • コミュニティUpstream活動 • OpenStack関連イベントでの講演
5.
Copyright© 2016 NTT
Software Corporation 7 OpenStackとは何か?
6.
Copyright© 2016 NTT
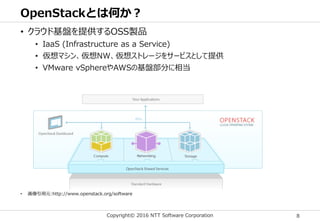
Software Corporation 8 OpenStackとは何か? • クラウド基盤を提供するOSS製品 • IaaS (Infrastructure as a Service) • 仮想マシン、仮想NW、仮想ストレージをサービスとして提供 • VMware vSphereやAWSの基盤部分に相当 • 画像引用元:http://www.openstack.org/software
7.
Copyright© 2016 NTT
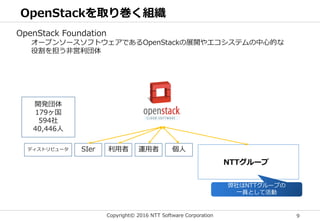
Software Corporation 9 OpenStackを取り巻く組織 開発団体 179ヶ国 594社 40,446人 弊社はNTTグループの 一員として活動 SIer 利用者 運用者 個人ディストリビュータ OpenStack Foundation オープンソースソフトウェアであるOpenStackの展開やエコシステムの中心的な 役割を担う非営利団体 NTTグループ
8.
Copyright© 2016 NTT
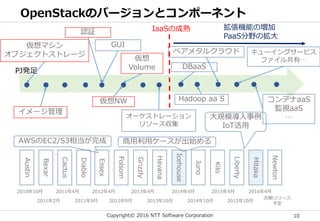
Software Corporation 10 OpenStackのバージョンとコンポーネント Austin Bexar Cactus Diablo Essex Folsom Grizzly Havana Icehouse Juno Kilo Liberty Mitaka 仮想NW 仮想 Volume DBaaS Hadoop aa S 仮想マシン オブジェクトストレージ イメージ管理 認証 オーケストレーション リソース収集 ベアメタルクラウド キューイングサービス ファイル共有… 2010年10月 2011年2月 2011年4月 2011年9月 2012年4月 2012年9月 2013年4月 2013年10月 2014年4月 2014年10月 2015年4月 2015年10月 2016年4月 AWSのEC2/S3相当が完成 商用利用ケースが出始める 大規模導入事例 IoT活用 Newton 次期リリース 予定 コンテナaaS 監視aaS … IaaSの成熟 拡張機能の増加 PaaS分野の拡大 GUI PJ発足
9.
Copyright© 2016 NTT
Software Corporation 11 世の中の動向
10.
Copyright© 2016 NTT
Software Corporation 12 世の中の動向 • OpenStack Foundationが半年に1回実施している アンケート結果より、 世の中のOpenStack利用者はどのような使い方をし ているのかを紹介する。
11.
Copyright© 2016 NTT
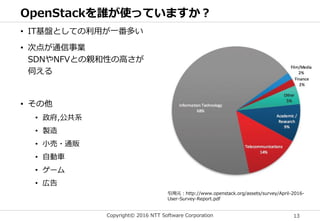
Software Corporation 13 OpenStackを誰が使っていますか? • IT基盤としての利用が一番多い • 次点が通信事業 SDNやNFVとの親和性の高さが 伺える • その他 • 政府,公共系 • 製造 • 小売・通販 • 自動車 • ゲーム • 広告 引用元:http://www.openstack.org/assets/survey/April-2016- User-Survey-Report.pdf
12.
Copyright© 2016 NTT
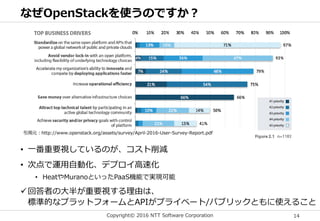
Software Corporation 14 • 一番重要視しているのが、コスト削減 • 次点で運用自動化、デプロイ高速化 • HeatやMuranoといったPaaS機能で実現可能 回答者の大半が重要視する理由は、 標準的なプラットフォームとAPIがプライベート/パブリックともに使えること なぜOpenStackを使うのですか? 引用元:http://www.openstack.org/assets/survey/April-2016-User-Survey-Report.pdf
13.
Copyright© 2016 NTT
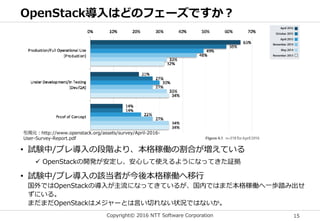
Software Corporation 15 OpenStack導入はどのフェーズですか? 引用元:http://www.openstack.org/assets/survey/April-2016- User-Survey-Report.pdf • 試験中/プレ導入の段階より、本格稼働の割合が増えている OpenStackの開発が安定し、安心して使えるようになってきた証拠 • 試験中/プレ導入の該当者が今後本格稼働へ移行 国外ではOpenStackの導入が主流になってきているが、国内ではまだ本格稼働へ一歩踏み出せ ずにいる。 まだまだOpenStackはメジャーとは言い切れない状況ではないか。
14.
Copyright© 2016 NTT
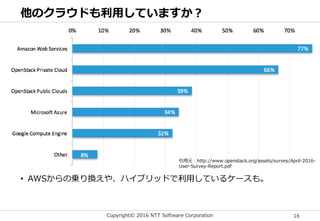
Software Corporation 16 他のクラウドも利用していますか? • AWSからの乗り換えや、ハイブリッドで利用しているケースも。 引用元:http://www.openstack.org/assets/survey/April-2016- User-Survey-Report.pdf
15.
Copyright© 2016 NTT
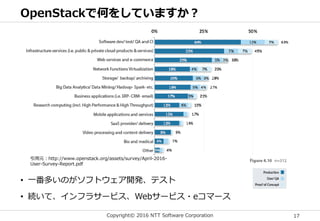
Software Corporation 17 OpenStackで何をしていますか? 引用元:http://www.openstack.org/assets/survey/April-2016- User-Survey-Report.pdf • 一番多いのがソフトウェア開発、テスト • 続いて、インフラサービス、Webサービス・eコマース
16.
Copyright© 2016 NTT
Software Corporation 18 OpenStack導入の メリット・デメリット
17.
Copyright© 2016 NTT
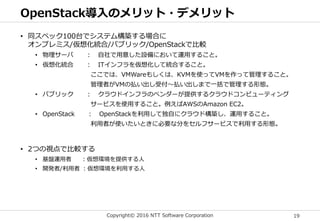
Software Corporation 19 OpenStack導入のメリット・デメリット • 同スペック100台でシステム構築する場合に オンプレミス/仮想化統合/パブリック/OpenStackで比較 • 物理サーバ : 自社で用意した設備において運用すること。 • 仮想化統合 : ITインフラを仮想化して統合すること。 ここでは、VMWareもしくは、KVMを使ってVMを作って管理すること。 管理者がVMの払い出し受付~払い出しまで一括で管理する形態。 • パブリック : クラウドインフラのベンダーが提供するクラウドコンピューティング サービスを使用すること。例えばAWSのAmazon EC2。 • OpenStack : OpenStackを利用して独自にクラウド構築し、運用すること。 利用者が使いたいときに必要な分をセルフサービスで利用する形態。 • 2つの視点で比較する • 基盤運用者 :仮想環境を提供する人 • 開発者/利用者 :仮想環境を利用する人
18.
Copyright© 2016 NTT
Software Corporation 20 OpenStack導入のメリット・デメリット(基盤運用者) 物理サーバ 仮想化統合 パブリック クラウド OpenStack 仮想マシン管理 の容易さ × ○ ◎ ◎ メンテナンス △ △ - △ アップデート △ △ - △ トラブル対応 ◎ △ △ △ 学習コスト ◎ △ - △
19.
Copyright© 2016 NTT
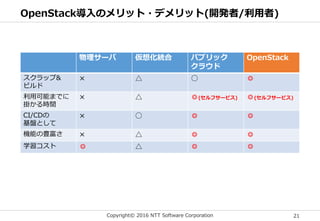
Software Corporation 21 OpenStack導入のメリット・デメリット(開発者/利用者) 物理サーバ 仮想化統合 パブリック クラウド OpenStack スクラップ& ビルド × △ ○ ◎ 利用可能までに 掛かる時間 × △ ◎(セルフサービス) ◎(セルフサービス) CI/CDの 基盤として × ○ ◎ ◎ 機能の豊富さ × △ ◎ ◎ 学習コスト ◎ △ ◎ ◎
20.
Copyright© 2016 NTT
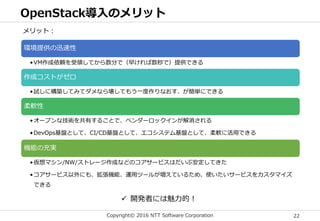
Software Corporation 22 OpenStack導入のメリット 環境提供の迅速性 •VM作成依頼を受領してから数分で(早ければ数秒で)提供できる 作成コストがゼロ •試しに構築してみてダメなら壊してもう一度作りなおす、が簡単にできる 柔軟性 •オープンな技術を共有することで、ベンダーロックインが解消される •DevOps基盤として、CI/CD基盤として、エコシステム基盤として、柔軟に活用できる 機能の充実 •仮想マシン/NW/ストレージ作成などのコアサービスはだいぶ安定してきた •コアサービス以外にも、拡張機能、運用ツールが増えているため、使いたいサービスをカスタマイズ できる メリット: 開発者には魅力的!
21.
Copyright© 2016 NTT
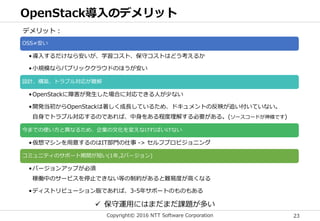
Software Corporation 23 OpenStack導入のデメリット OSS≠安い •導入するだけなら安いが、学習コスト、保守コストはどう考えるか •小規模ならパブリッククラウドのほうが安い 設計、構築、トラブル対応が難解 •OpenStackに障害が発生した場合に対応できる人が少ない •開発当初からOpenStackは著しく成長しているため、ドキュメントの反映が追い付いていない。 自身でトラブル対応するのであれば、中身をある程度理解する必要がある。(ソースコードが神様です) 今までの使い方と異なるため、企業の文化を変えなければいけない •仮想マシンを用意するのはIT部門の仕事 -> セルフプロビジョニング コミュニティのサポート期間が短い(1年,2バージョン) •バージョンアップが必須 稼働中のサービスを停止できない等の制約があると難易度が高くなる •ディストリビューション版であれば、3-5年サポートのものもある デメリット: 保守運用にはまだまだ課題が多い
22.
Copyright© 2016 NTT
Software Corporation 24 OpenStack導入 こんな人にオススメ 基盤運用者: 今後大規模環境が必要になるので、導入コストを減らしたい! 幅広いサービス展開を見込んでおり、スムーズに環境提供、運用をおこないたい! 開発者、利用者: VMを作ったり消したり、自分たちで手軽に使いたい! OpenStackが提供している様々な運用・拡張機能を組み合わせて便利にしたい!
23.
Copyright© 2016 NTT
Software Corporation 25 質疑応答
24.
Copyright© 2016 NTT
Software Corporation 26 OpenStack入門 各コンポーネントの役割 できること
25.
Copyright© 2016 NTT
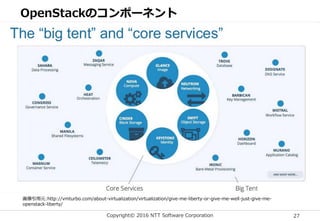
Software Corporation 27 OpenStackのコンポーネント 画像引用元:http://vmturbo.com/about-virtualization/virtualization/give-me-liberty-or-give-me-well-just-give-me- openstack-liberty/
26.
Copyright© 2016 NTT
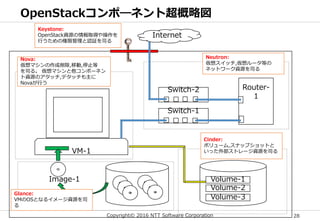
Software Corporation 28 OpenStackコンポ―ネント超概略図 VM-1 Volume-1 Volume-2 Volume-3 Image-1 Internet Keystone: OpenStack資源の情報取得や操作を 行うための権限管理と認証を司る Neutron: 仮想スイッチ,仮想ルータ等の ネットワーク資源を司る Cinder: ボリューム,スナップショットと いった外部ストレージ資源を司る Glance: VMのOSとなるイメージ資源を司 る Nova: 仮想マシンの作成削除,移動,停止等 を司る。 仮想マシンと他コンポーネン ト資源のアタッチ,デタッチも主に Novaが行う Switch-1 Switch-2 Router- 1
27.
Copyright© 2016 NTT
Software Corporation 29 Horizon
28.
Copyright© 2016 NTT
Software Corporation 30 Horizon(Web GUI) • WebブラウザからOpenStackを操作す る機能 • インスタンス、ネットワーク、スト レージ等のOpenStackコンポーネント の操作が可能 • HTML5をサポートしているブラウザか ら利用できる • 別のCSSやJavaScriptを読み込ませる 等のカスタマイズが可能
29.
Copyright© 2016 NTT
Software Corporation 31 Horizonの画面
30.
Copyright© 2016 NTT
Software Corporation 32 Keystone
31.
Copyright© 2016 NTT
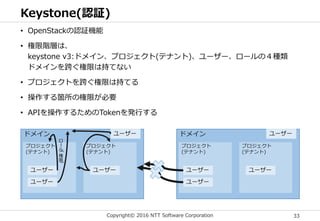
Software Corporation 33 Keystone(認証) • OpenStackの認証機能 • 権限階層は、 keystone v3:ドメイン、プロジェクト(テナント)、ユーザー、ロールの4種類 ドメインを跨ぐ権限は持てない • プロジェクトを跨ぐ権限は持てる • 操作する箇所の権限が必要 • APIを操作するためのTokenを発行する ドメイン プロジェクト (テナント) プロジェクト (テナント) ユーザー ユーザー ユーザー ユーザー ロ ー ル ( 権 限 ) ドメイン プロジェクト (テナント) プロジェクト (テナント) ユーザー ユーザー ユーザー ユーザー
32.
Copyright© 2016 NTT
Software Corporation 34 Glance(イメージ)
33.
Copyright© 2016 NTT
Software Corporation 35 Glance(イメージ) • インスタンス起動のための元ディスクとなるイメージを管理する機能 • raw,qcow2,ami,isoが扱える • イメージ作成 • イメージアップロード、ダウンロード • インスタンスのイメージバックアップ • イメージからボリュームの作成
34.
Copyright© 2016 NTT
Software Corporation 36 Neutron ( NW, Router , LB)
35.
Copyright© 2016 NTT
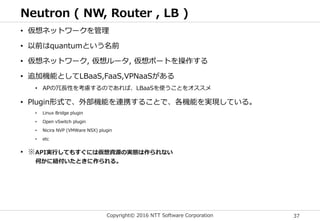
Software Corporation 37 Neutron ( NW, Router , LB ) • 仮想ネットワークを管理 • 以前はquantumという名前 • 仮想ネットワーク, 仮想ルータ, 仮想ポートを操作する • 追加機能としてLBaaS,FaaS,VPNaaSがある • APの冗長性を考慮するのであれば、LBaaSを使うことをオススメ • Plugin形式で、外部機能を連携することで、各機能を実現している。 • Linux Bridge plugin • Open vSwitch plugin • Nicira NVP (VMWare NSX) plugin • etc • ※API実行してもすぐには仮想資源の実態は作られない 何かに紐付いたときに作られる。
36.
Copyright© 2016 NTT
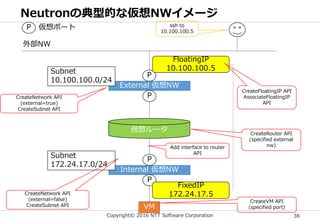
Software Corporation 38 Neutronの典型的な仮想NWイメージ VM External 仮想NW Internal 仮想NW 仮想ルータ P P P Subnet 172.24.17.0/24 Subnet 10.100.100.0/24 P P 仮想ポート FloatingIP 10.100.100.5 ssh to 10.100.100.5 FixedIP 172.24.17.5 外部NW CreateFloatingIP API AssociateFloatingIP API CreateNetwork API (external=true) CreateSubnet API CreateNetwork API (external=false) CreateSubnet API CreateVM API (specified port) CreateRouter API (specified external nw)Add interface to router API
37.
Copyright© 2016 NTT
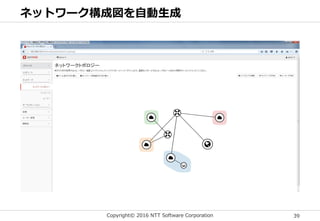
Software Corporation 39 ネットワーク構成図を自動生成
38.
Copyright© 2016 NTT
Software Corporation 40 Nova ( インスタンス )
39.
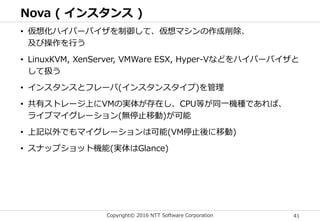
Copyright© 2016 NTT
Software Corporation 41 Nova ( インスタンス ) • 仮想化ハイパーバイザを制御して、仮想マシンの作成削除、 及び操作を行う • LinuxKVM, XenServer, VMWare ESX, Hyper-Vなどをハイパーバイザと して扱う • インスタンスとフレーバ(インスタンスタイプ)を管理 • 共有ストレージ上にVMの実体が存在し、CPU等が同一機種であれば、 ライブマイグレーション(無停止移動)が可能 • 上記以外でもマイグレーションは可能(VM停止後に移動) • スナップショット機能(実体はGlance)
40.
Copyright© 2016 NTT
Software Corporation 42 Cinder ( ボリューム )
41.
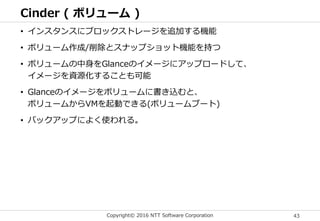
Copyright© 2016 NTT
Software Corporation 43 Cinder ( ボリューム ) • インスタンスにブロックストレージを追加する機能 • ボリューム作成/削除とスナップショット機能を持つ • ボリュームの中身をGlanceのイメージにアップロードして、 イメージを資源化することも可能 • Glanceのイメージをボリュームに書き込むと、 ボリュームからVMを起動できる(ボリュームブート) • バックアップによく使われる。
42.
Copyright© 2016 NTT
Software Corporation 44 OpenStackの本格導入へ向けて
43.
Copyright© 2016 NTT
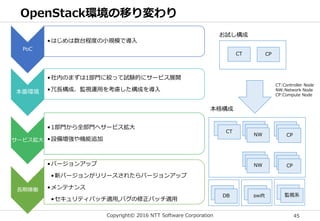
Software Corporation 45 OpenStack環境の移り変わり PoC •はじめは数台程度の小規模で導入 本番環境 •社内のまずは1部門に絞って試験的にサービス展開 •冗長構成、監視運用を考慮した構成を導入 サービス拡大 •1部門から全部門へサービス拡大 •設備増強や機能追加 長期稼働 •バージョンアップ •新バージョンがリリースされたらバージョンアップ •メンテナンス •セキュリティパッチ適用,バグの修正パッチ適用 CT CP NW CP CT NW CP DB swift 監視系 CT:Controller Node NW:Network Node CP:Compute Node お試し構成 本格構成
44.
Copyright© 2016 NTT
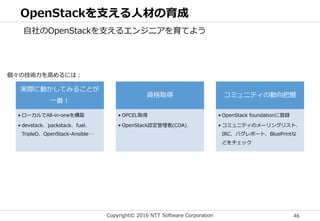
Software Corporation 46 OpenStackを支える人材の育成 実際に動かしてみることが 一番! • ローカルでAll-in-oneを構築 • devstack、packstack、fuel、 TripleO、OpenStack-Ansible… 資格取得 • OPCEL取得 • OpenStack認定管理者(COA) コミュニティの動向把握 • OpenStack foundationに登録 • コミュニティのメーリングリスト、 IRC、バグレポート、BluePrintな どをチェック 自社のOpenStackを支えるエンジニアを育てよう 個々の技術力を高めるには:
45.
Copyright© 2016 NTT
Software Corporation 47 質疑応答
46.
Copyright© 2016 NTT
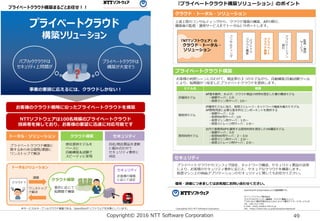
Software Corporation 48 当社が展開しているサービス
47.
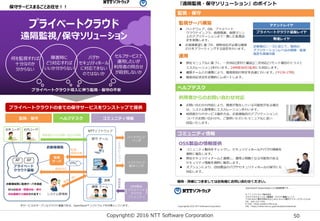
Copyright© 2016 NTT
Software Corporation 49
48.
Copyright© 2016 NTT
Software Corporation 50
49.
Copyright© 2016 NTT
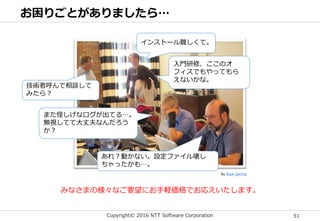
Software Corporation 51 お困りごとがありましたら… By Book Sprints みなさまの様々なご要望にお手軽価格でお応えいたします。 あれ?動かない。設定ファイル壊し ちゃったかも…。 インストール難しくて。 技術者呼んで相談して みたら? 入門研修、ここのオ フィスでもやってもら えないかな。 また怪しげなログが出てる…。 無視してて大丈夫なんだろう か?
50.
Copyright© 2016 NTT
Software Corporation 52 お問い合わせ先 • お問い合わせはこちらまで cloud_sup@cs.ntts.co.jp
51.
Copyright© 2016 NTT
Software Corporation 53 以上です。 ありがとうございました。
Download































![[D35] インメモリーデータベース徹底比較 by Komori](https://cdn.slidesharecdn.com/ss_thumbnails/d35hp-140623212142-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)













































