Downloaded 10 times
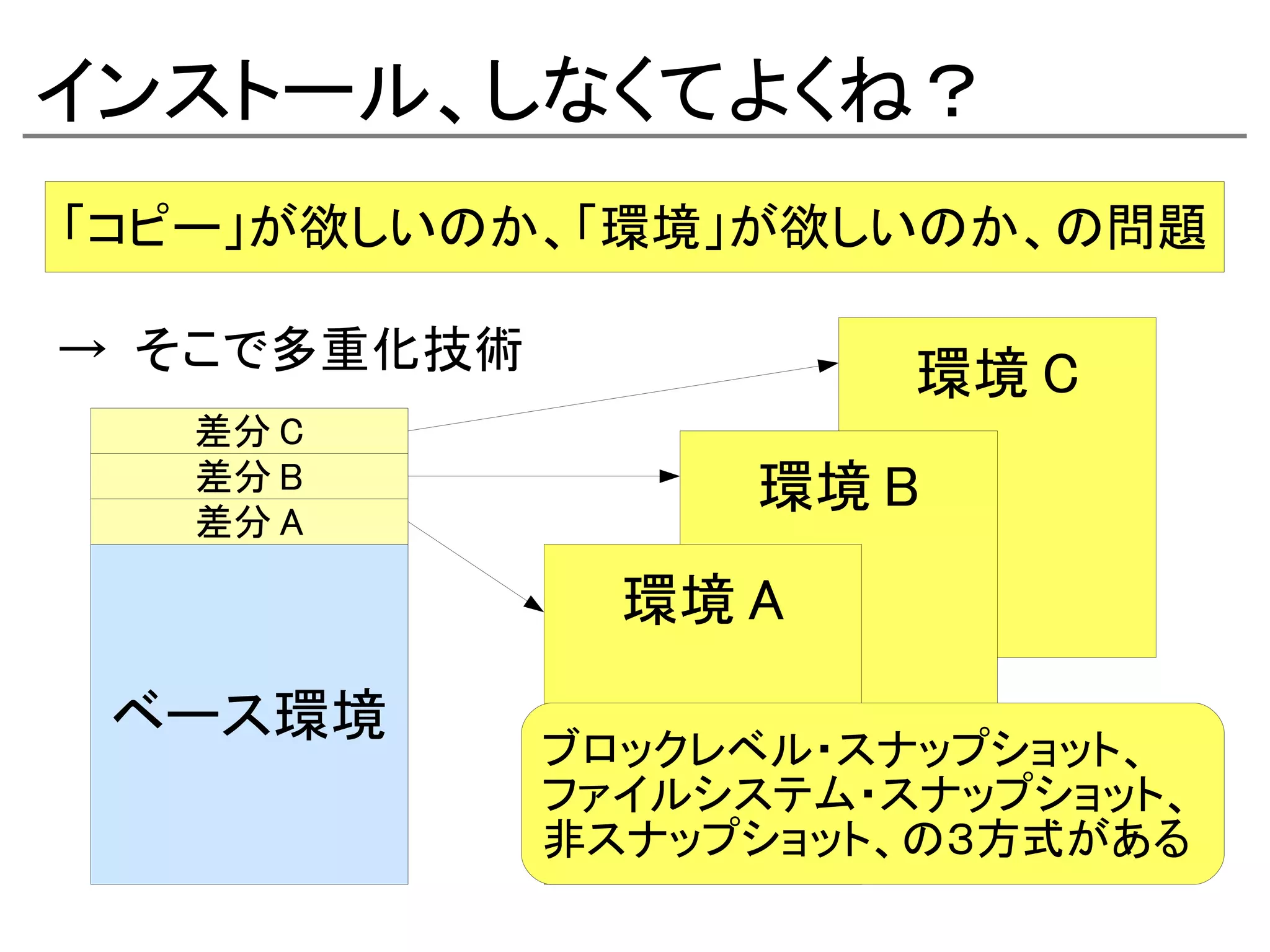
![d-i [+ preseeding] の中身
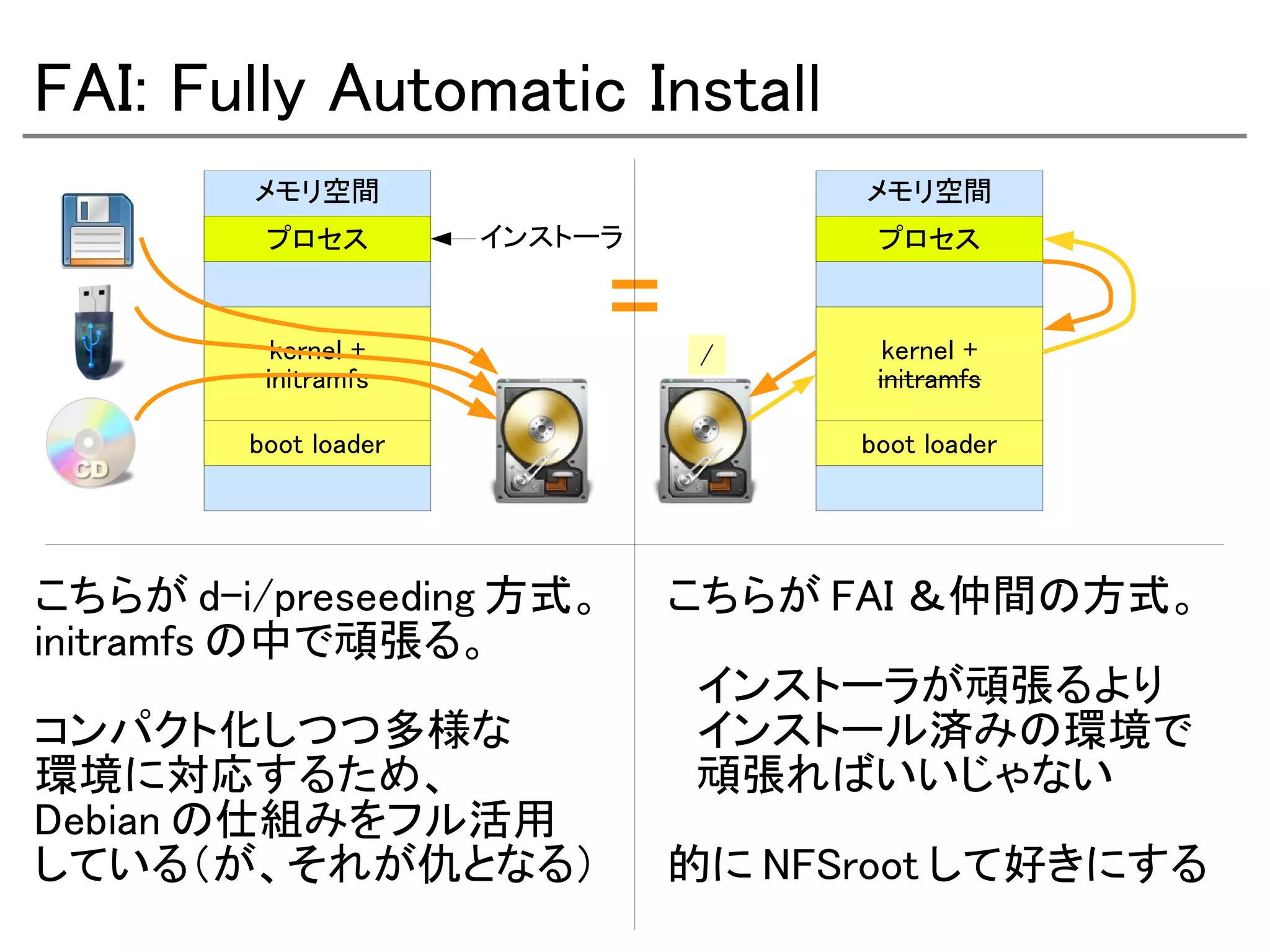
1. initramfs 環境として起動
2. init は /sbin/debian-installer* を
実行(これ+ rescue console 用意)
3. /sbin/d-i は preseeding file を
同梱ファイルや指定 URL からロード
4. initrd 同梱 +DL したパッケージの
「普通」の apt-get/dpkg 処理をする
※ 「普通」といっても initrd 同梱分はサイズ削減のため udeb というサイズ縮小された deb ベース](https://image.slidesharecdn.com/infinite-debian-mass-production-120218080754-phpapp02/75/Infinite-Debian-Platform-for-mass-producing-system-every-second-28-2048.jpg)
![sid.conf
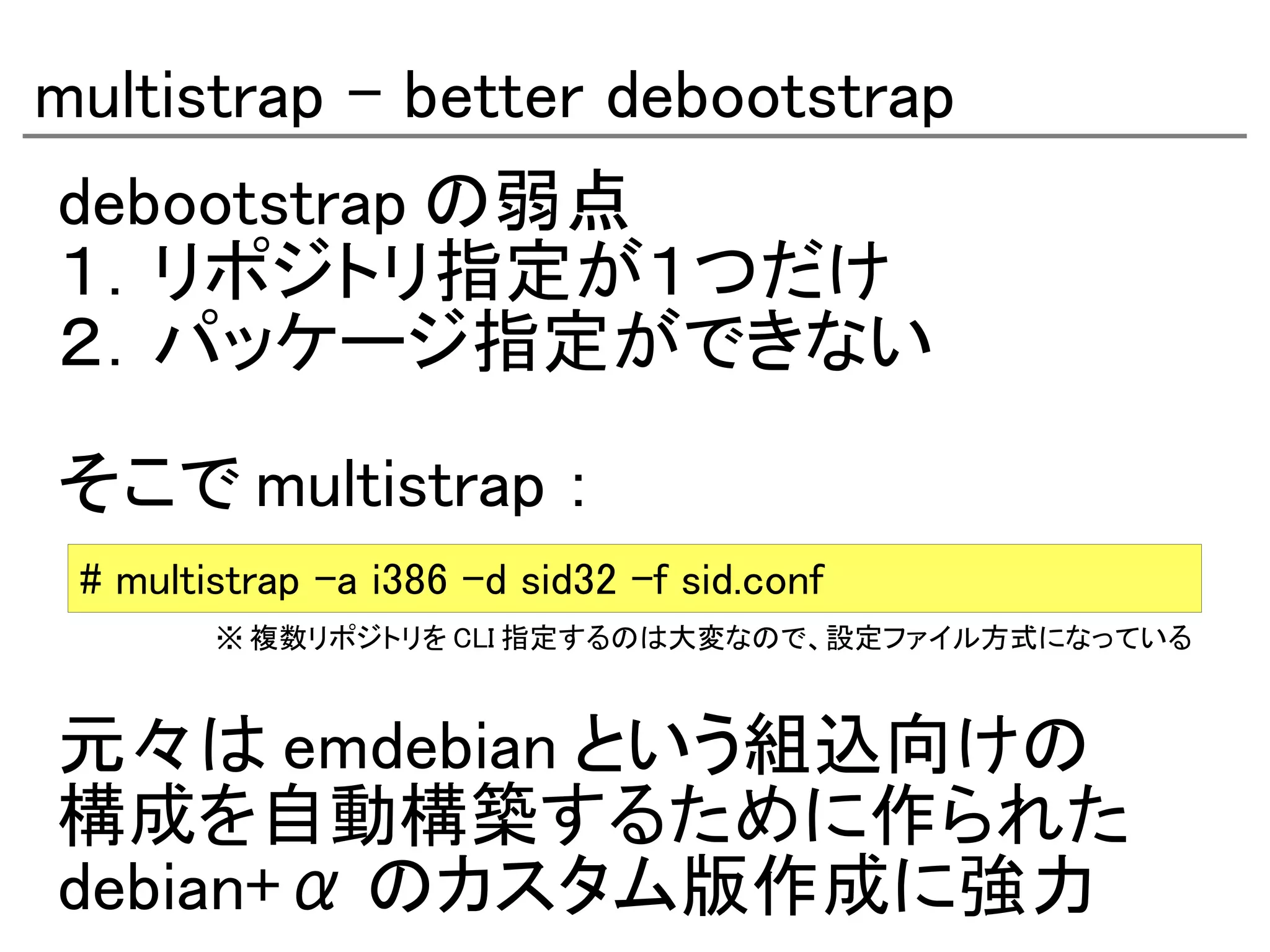
[general] # セクション名は case-insensitive
cleanup=true # 構築ツリー中の *.deb cache を残す
noauth=true # キーサインのチェックをするかどうか
bootstrap=sid local # 構築に使うリポジトリ
aptsources=sid local # /etc/apt/sources.list.d/* に残す
[sid]
suite=sid
source=http://my.repo.local:9999/debian
keyring=debian-archive-keyring
[local]
suite=sid
components=local # dists/(suite)/(components)/ を使う
source=http://my.repo.local/debian
packages=lx-image-3.2.5-tai-4f364f2e # このパッケージも入れる](https://image.slidesharecdn.com/infinite-debian-mass-production-120218080754-phpapp02/75/Infinite-Debian-Platform-for-mass-producing-system-every-second-44-2048.jpg)

Starting from standard install and various "Debian internal" for mass-installation system, the talk goes on to describe generic "instant system generation" which shortens turnaround time from 10s of minutes to seconds. All based on Debian. Prepared for kickstart meetup of FukuokaDebian.



































































