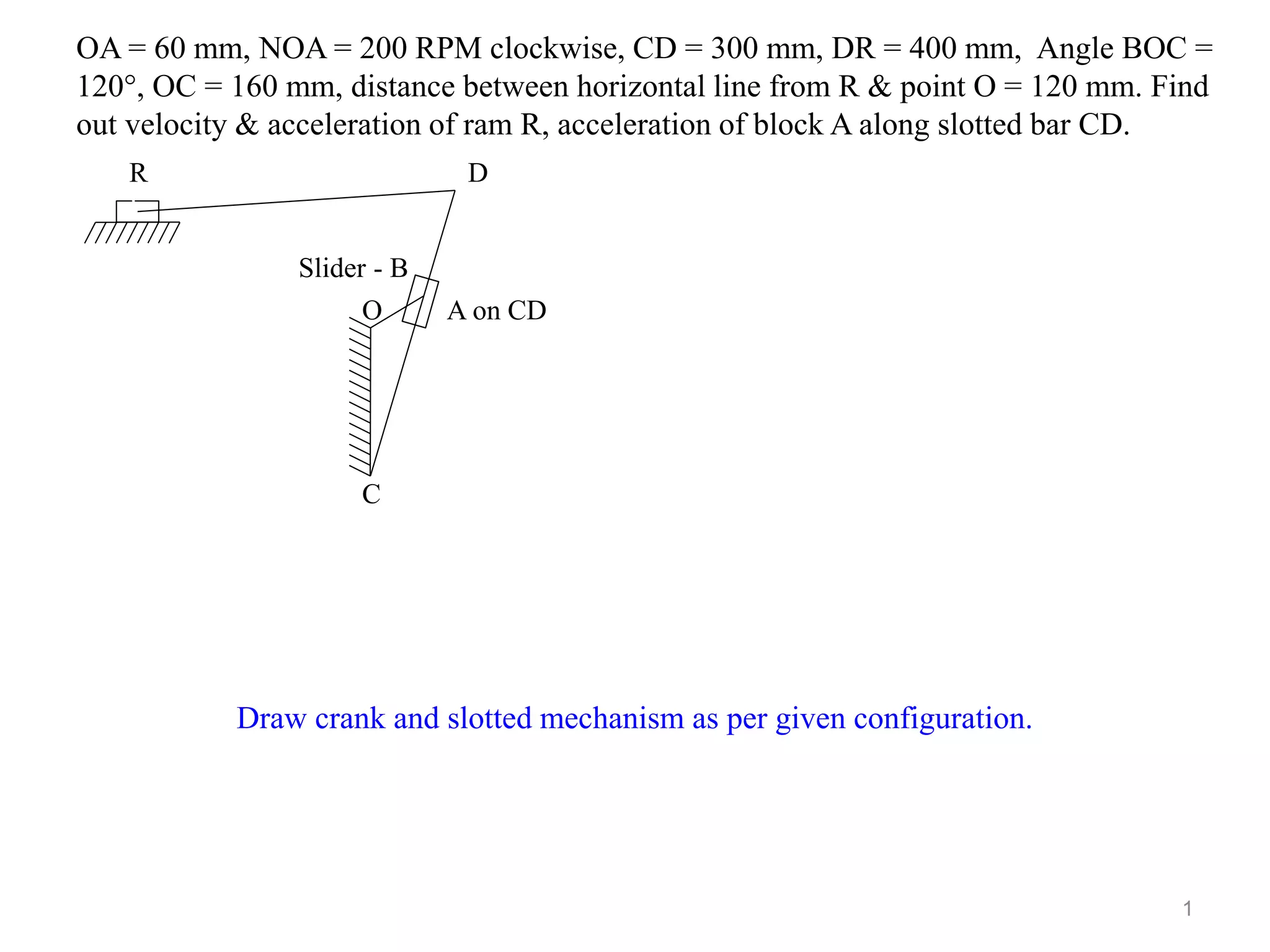
This document provides instructions for drawing velocity and acceleration diagrams for a slider-crank mechanism. It includes the following key steps:
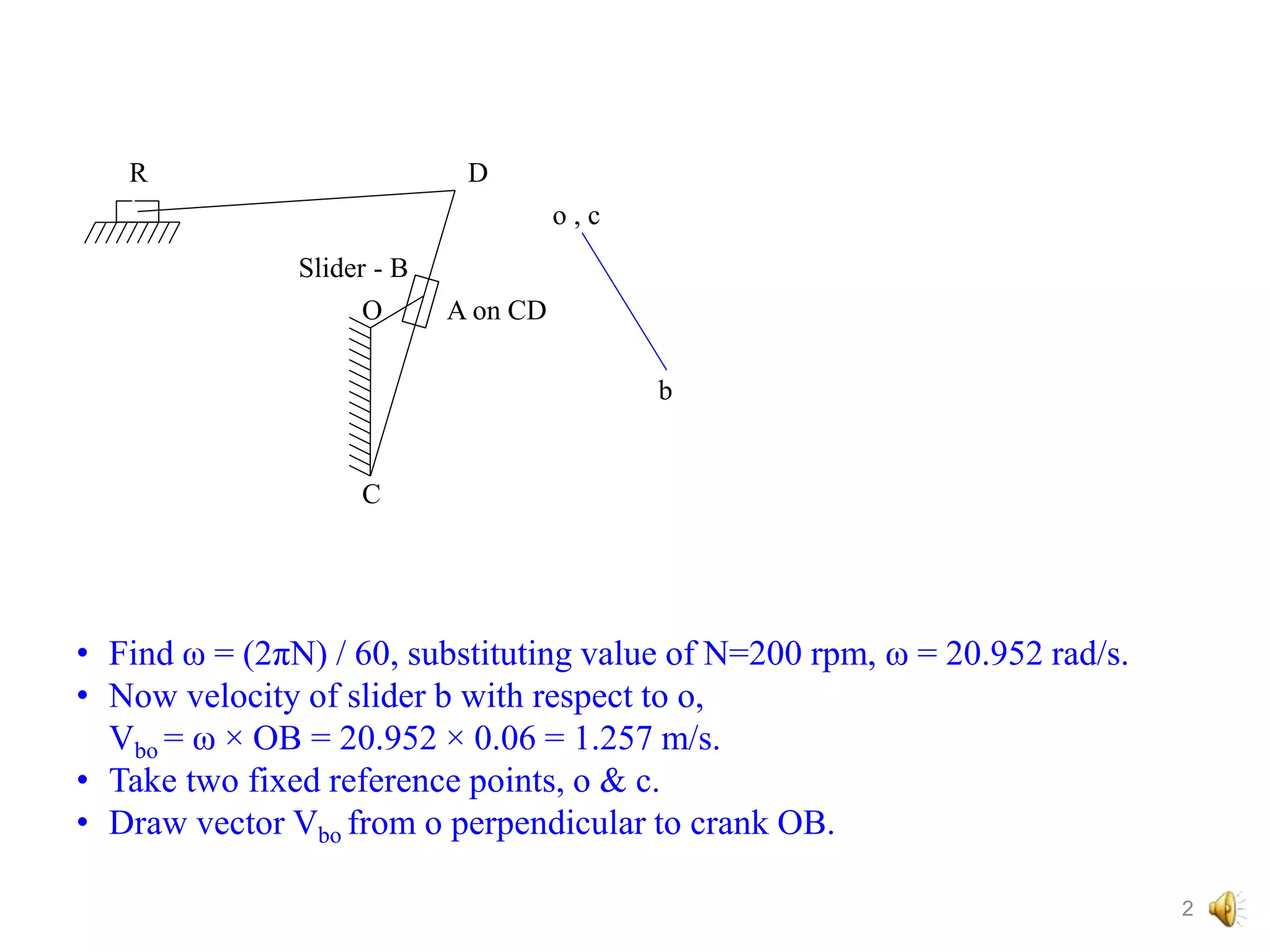
1. Calculate angular velocity and linear velocities of points using given dimensions and rotational speed.
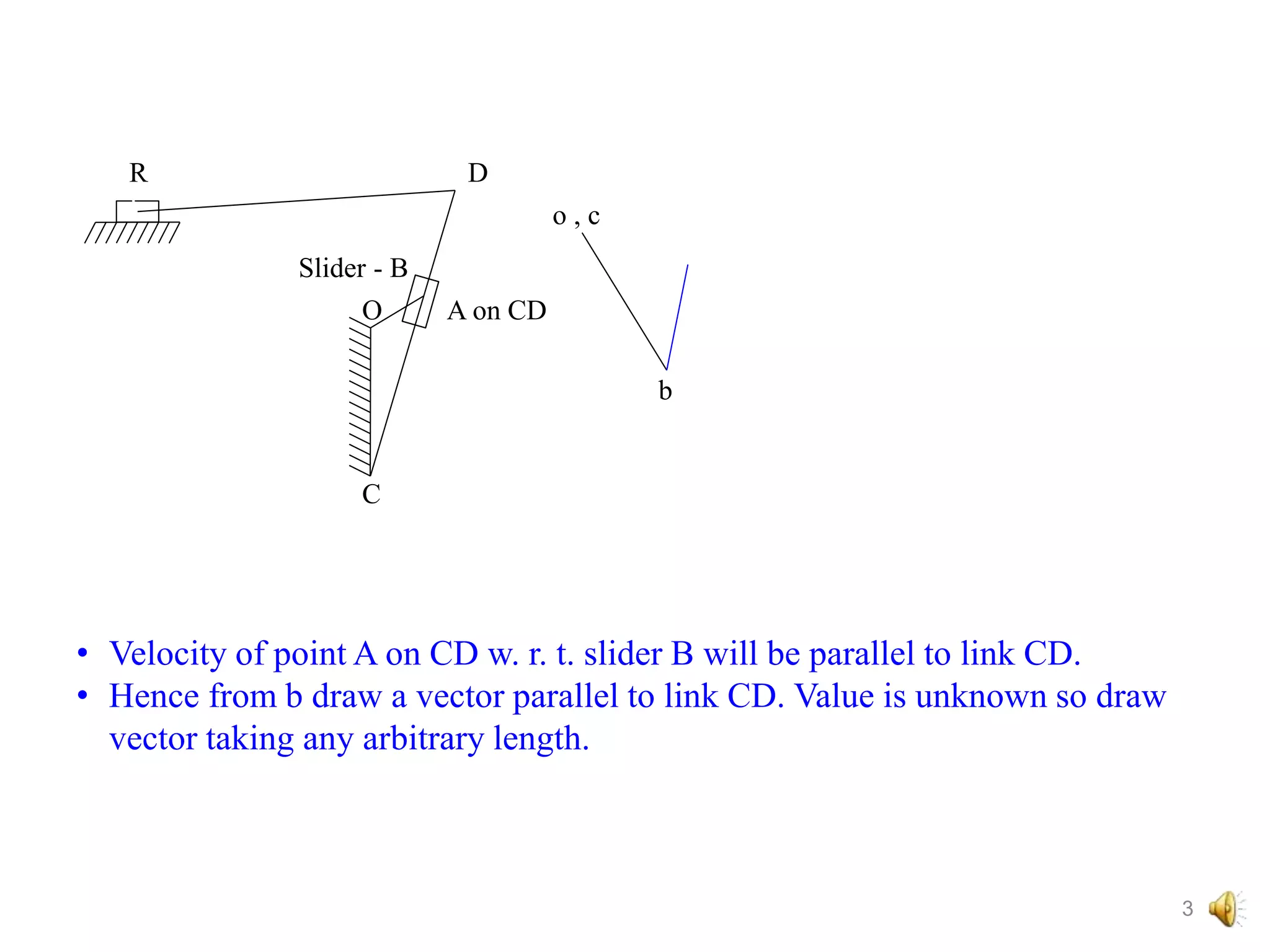
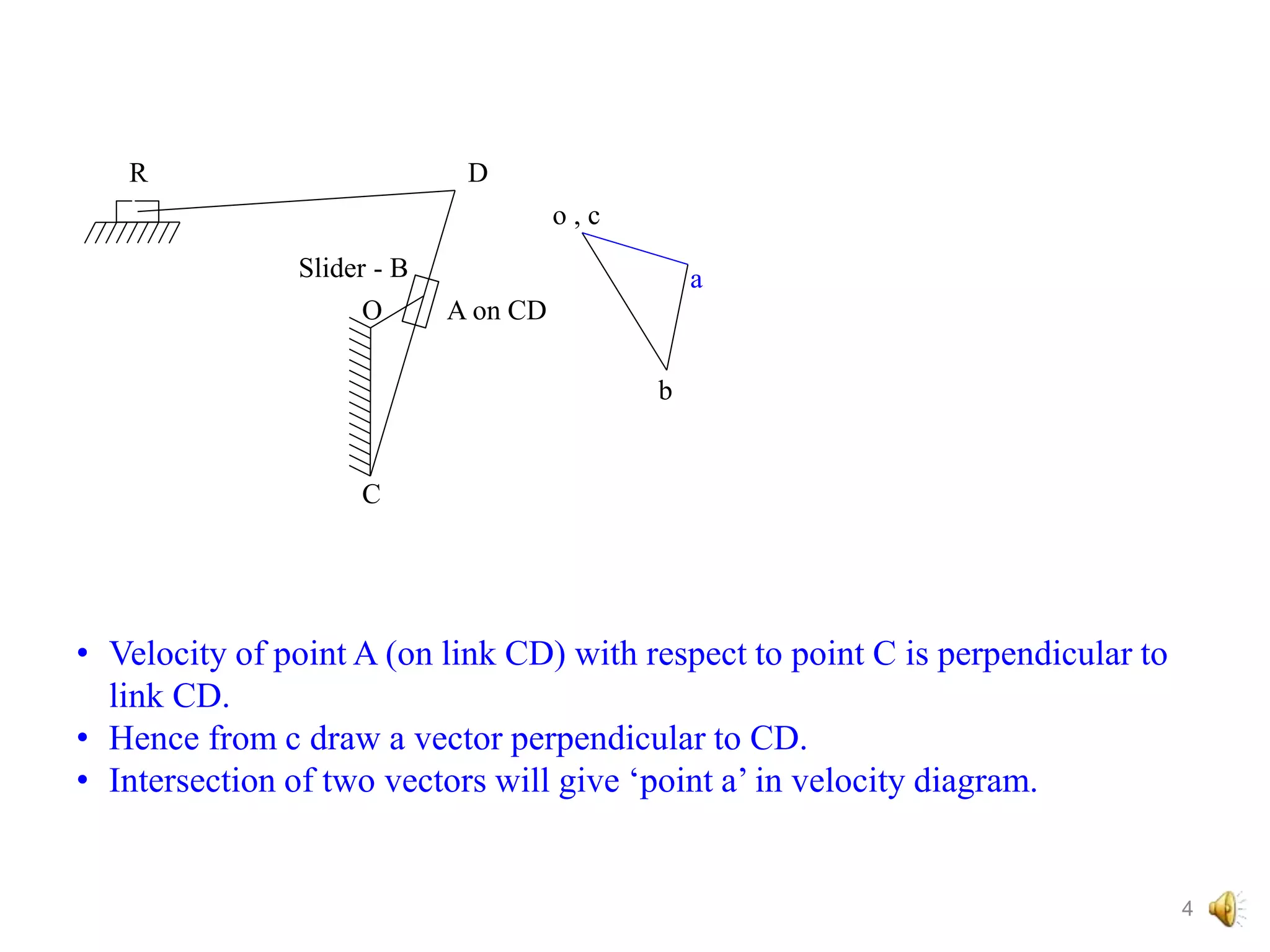
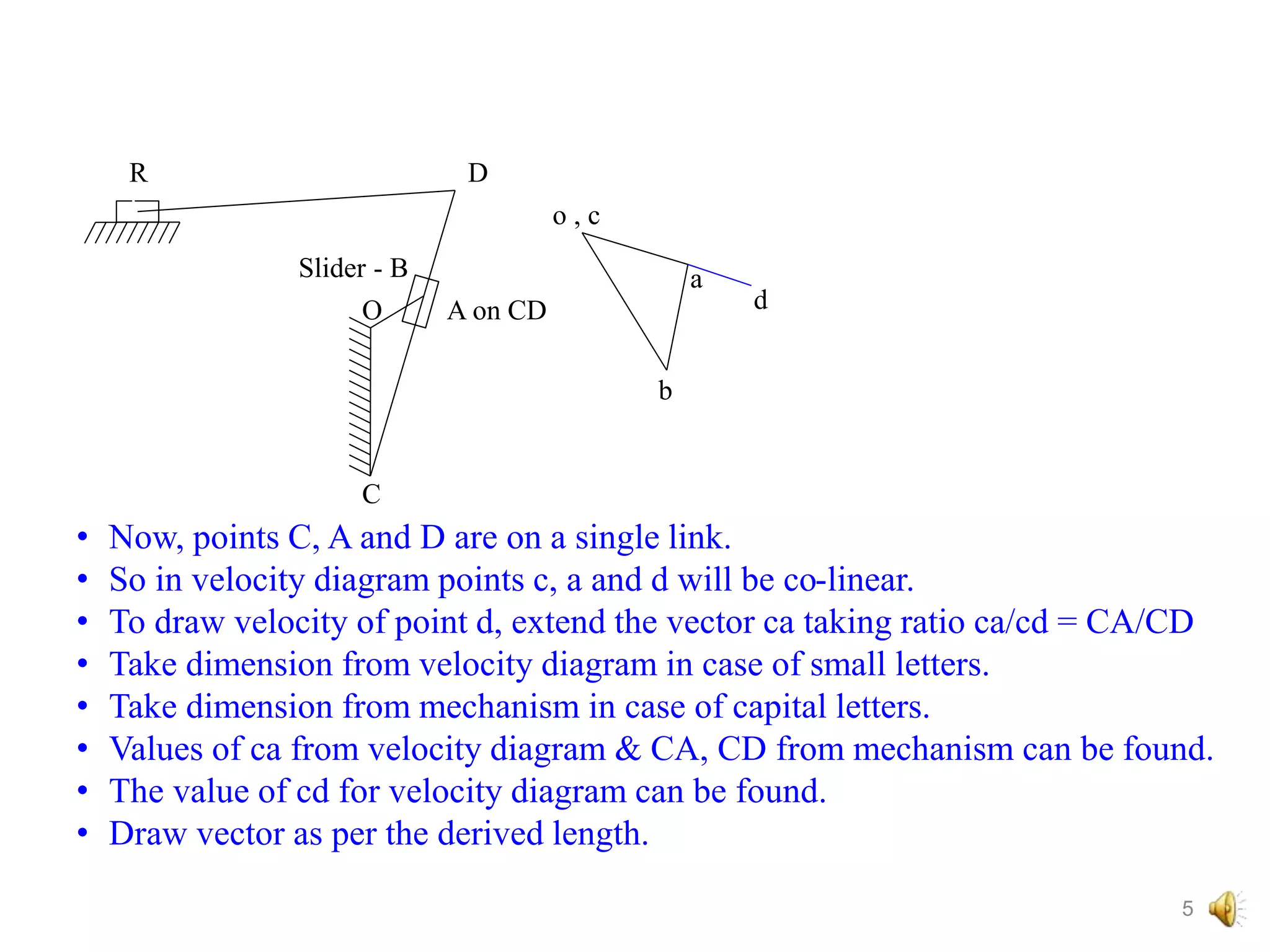
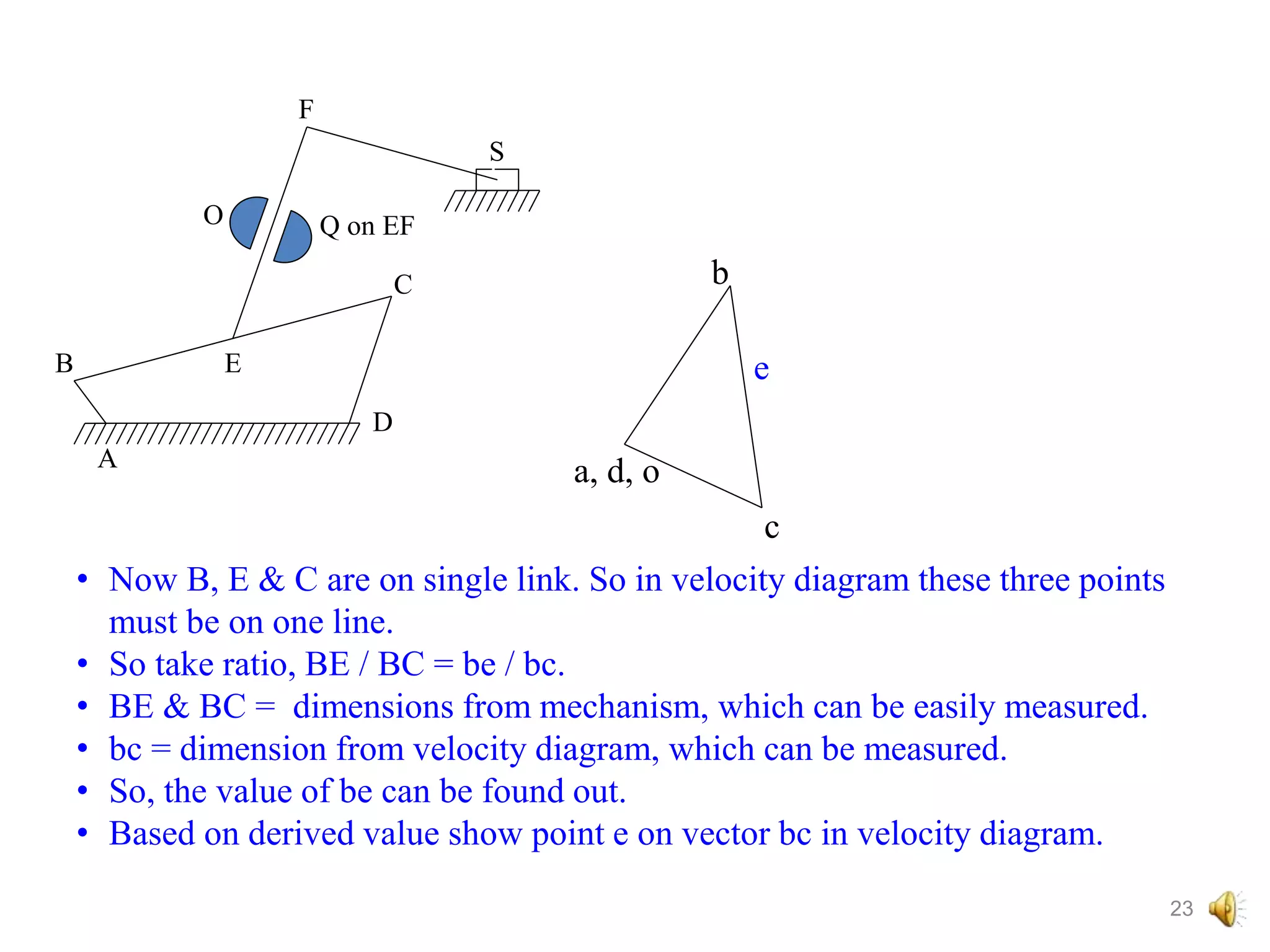
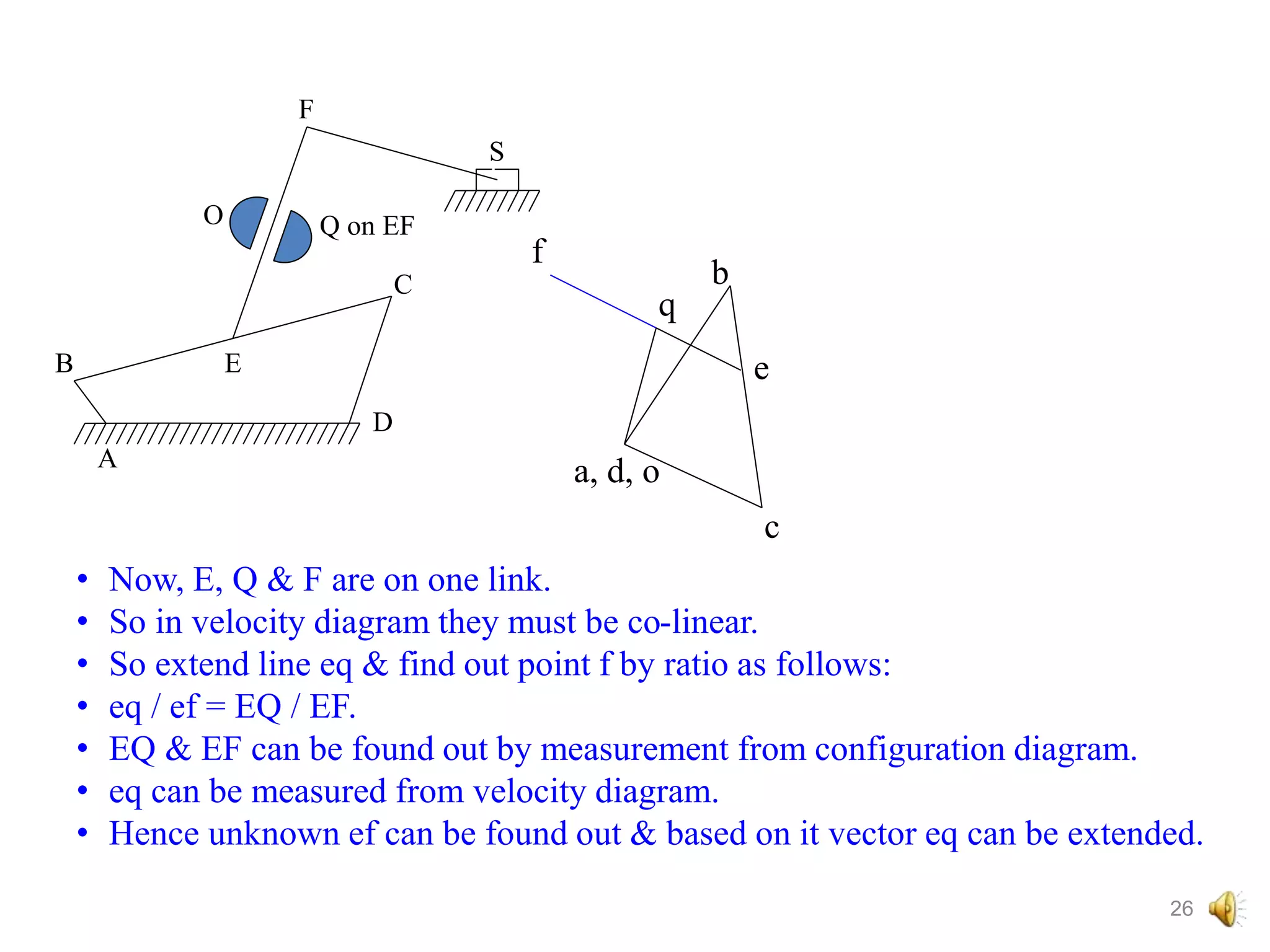
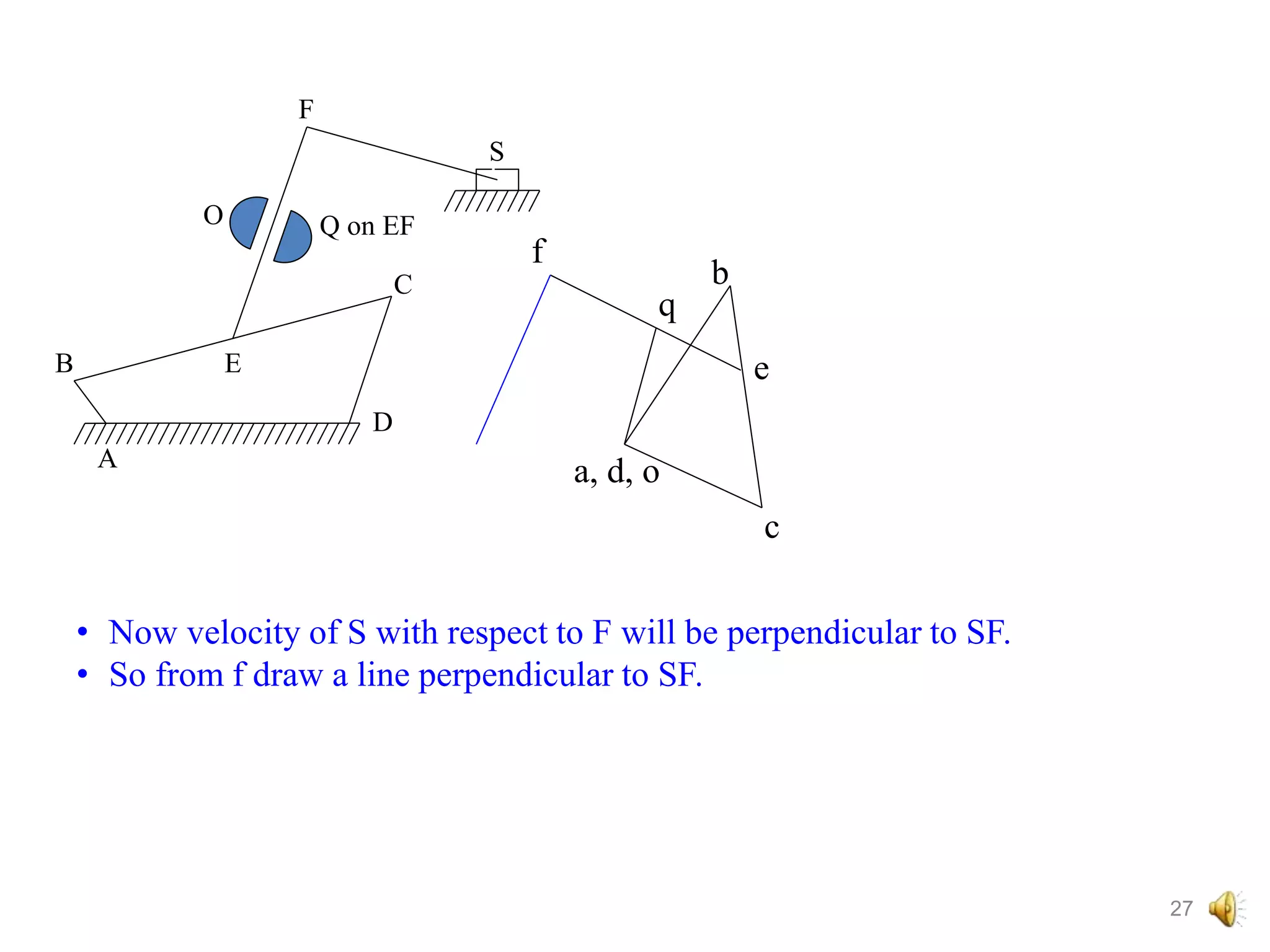
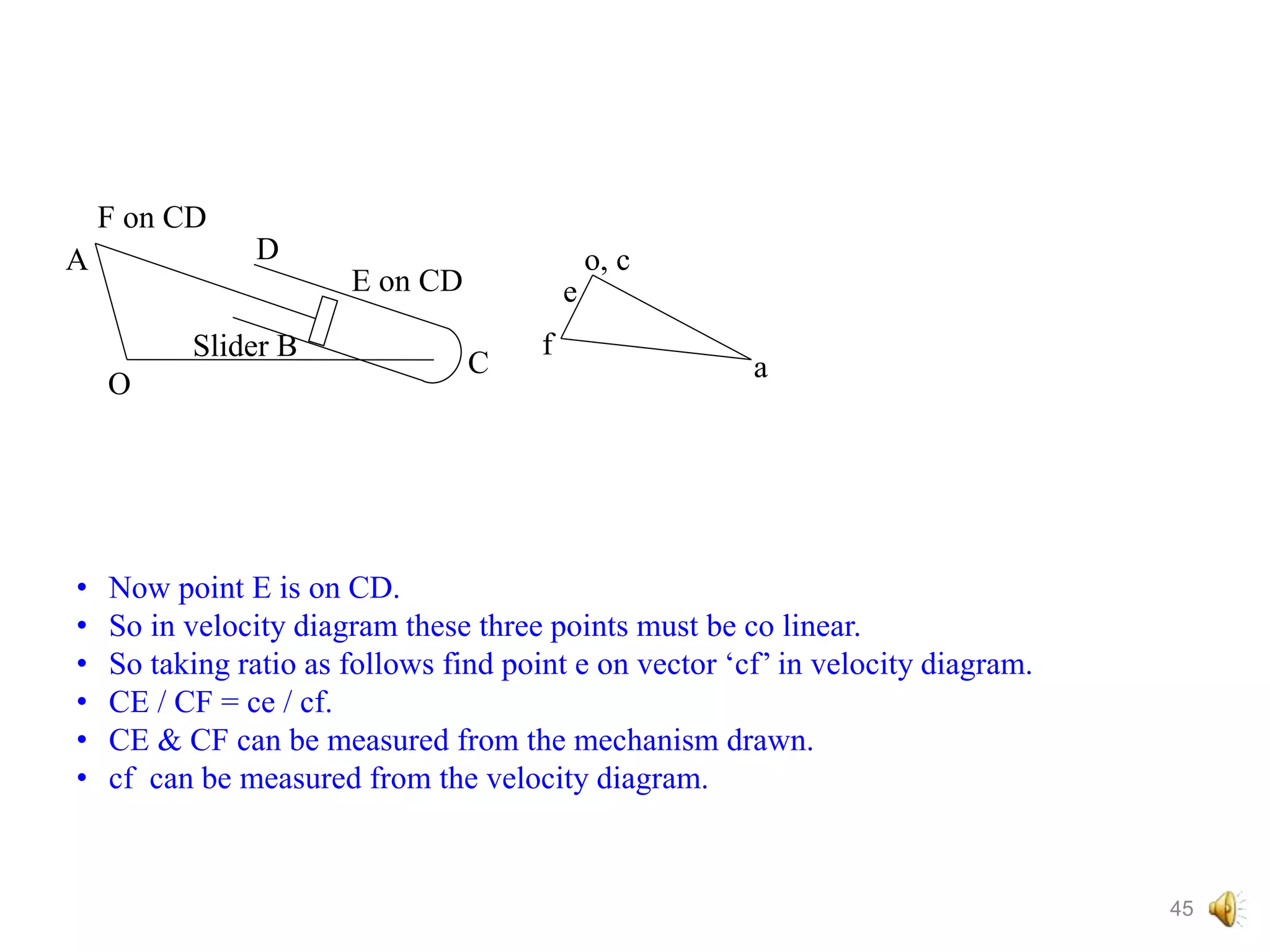
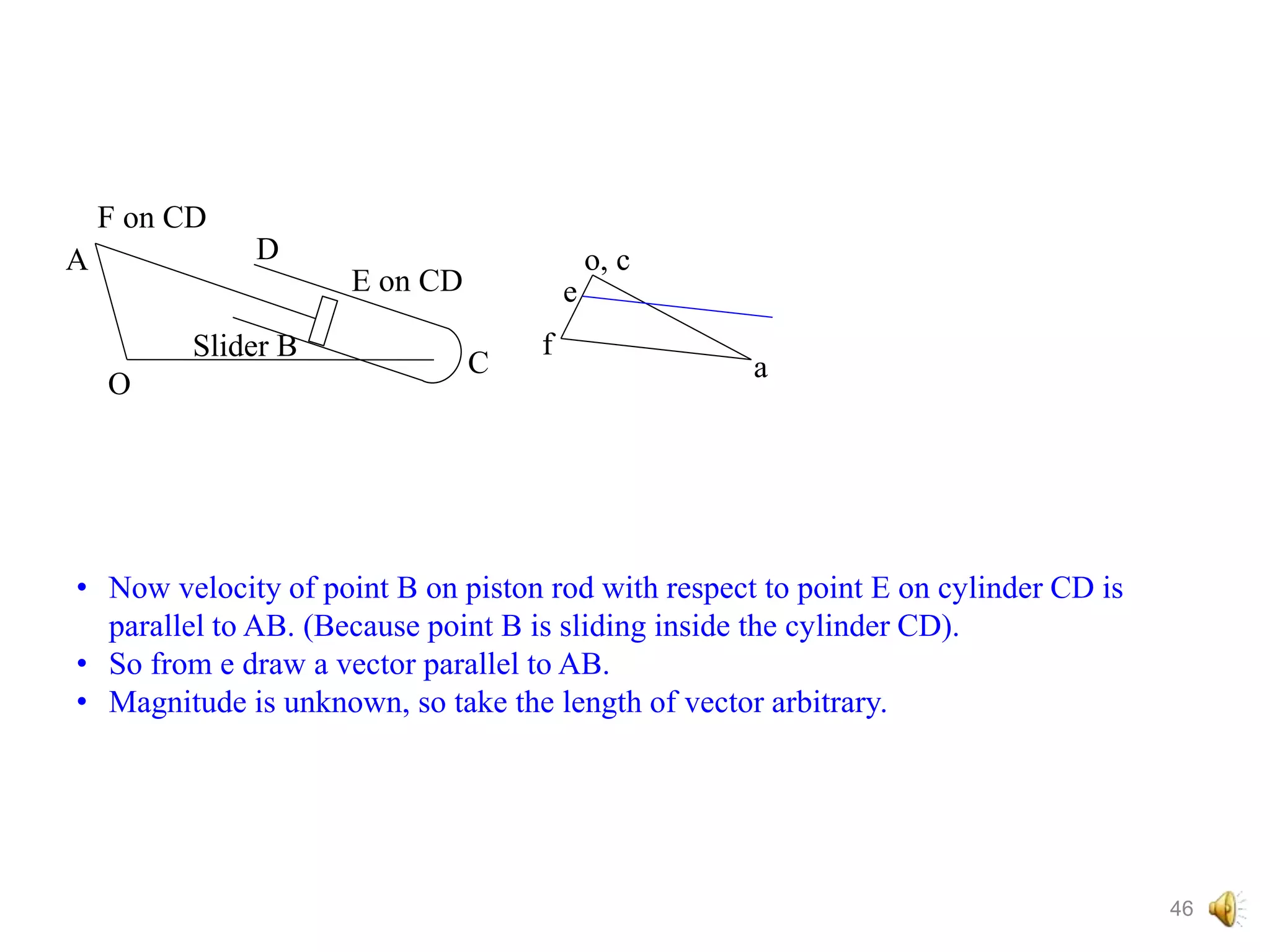
2. Draw velocity vectors in the velocity diagram showing velocities of all points relative to fixed references and each other.
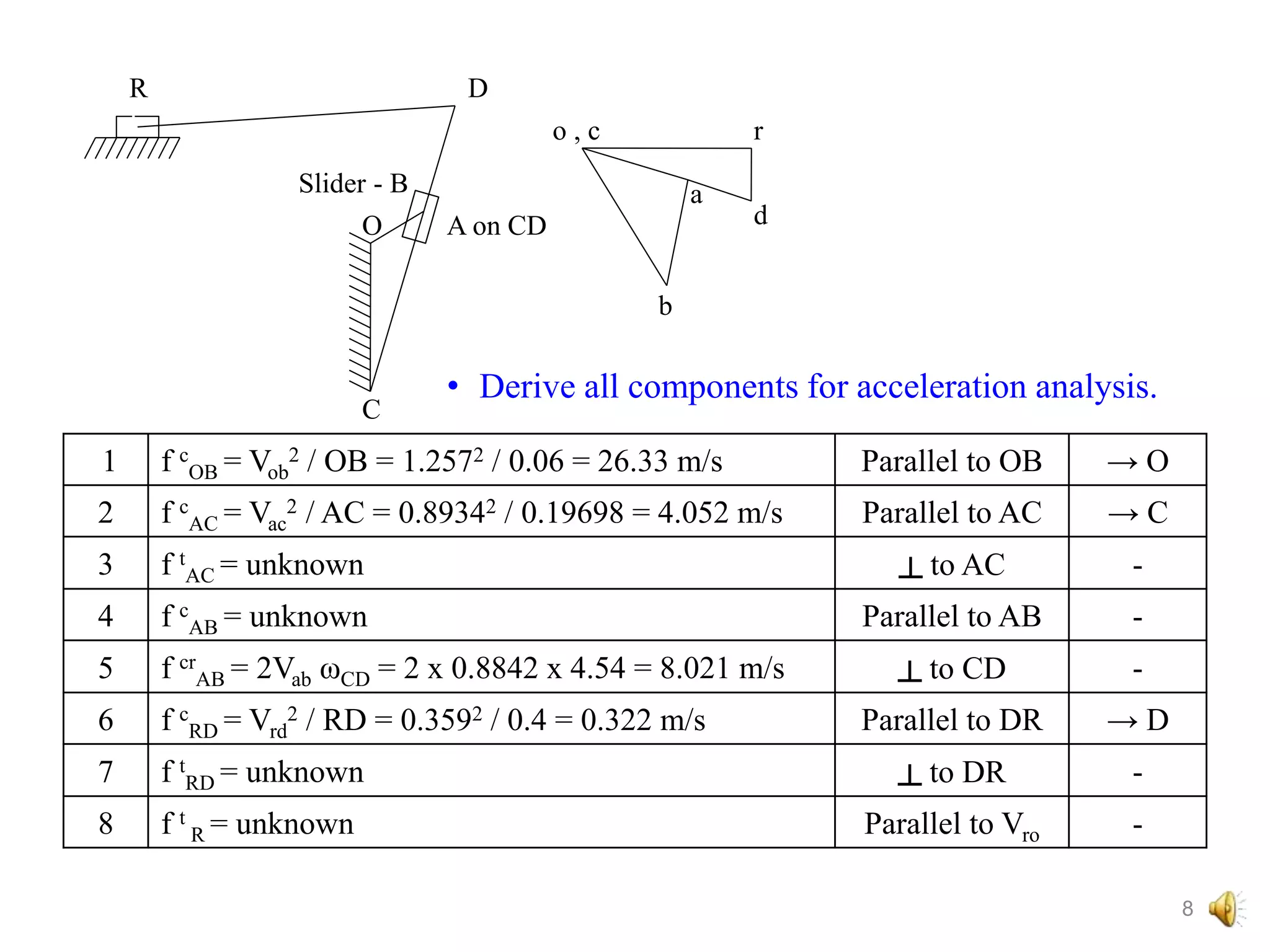
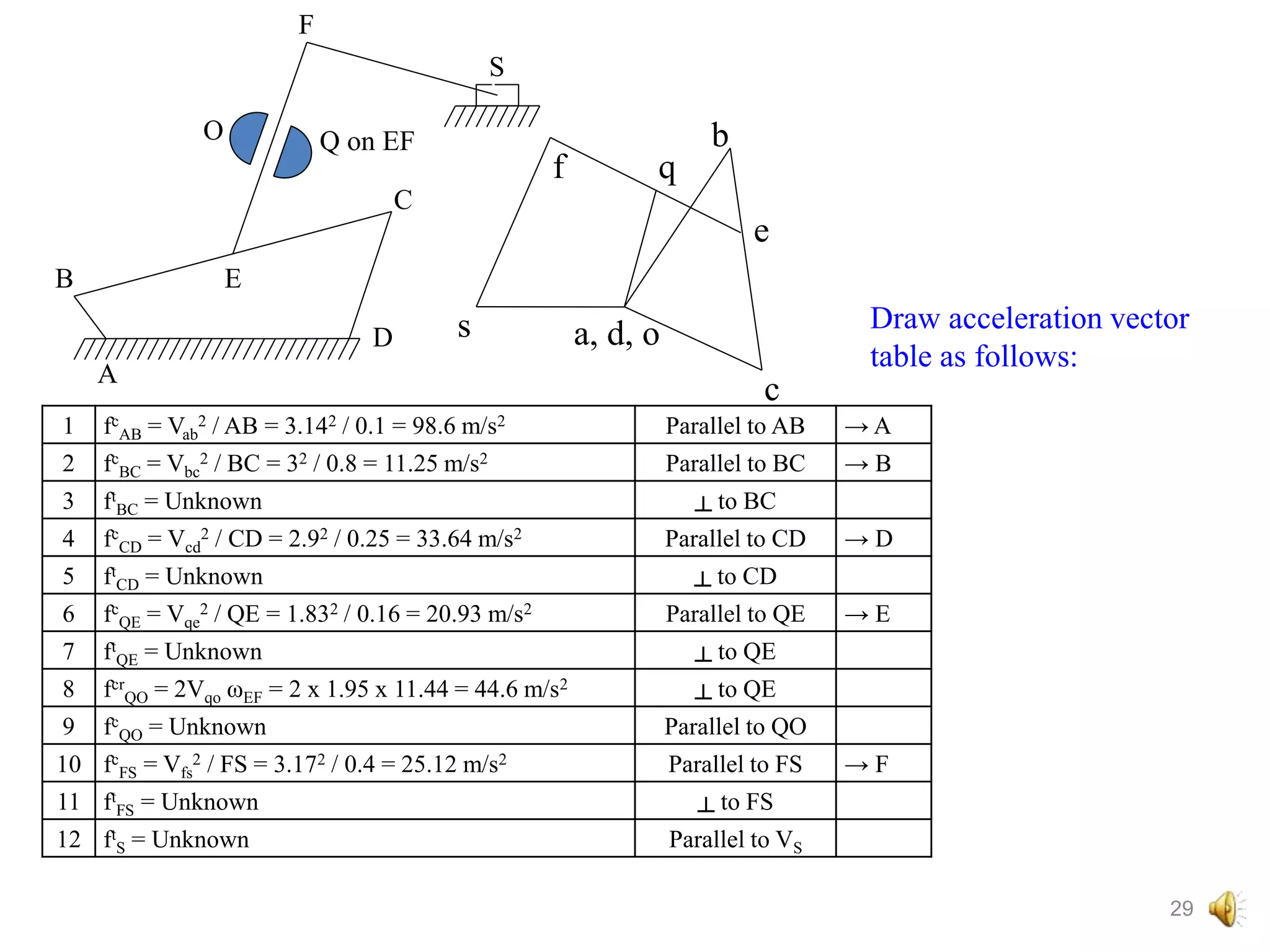
3. Derive accelerations of points from the velocity diagram and mechanism dimensions.
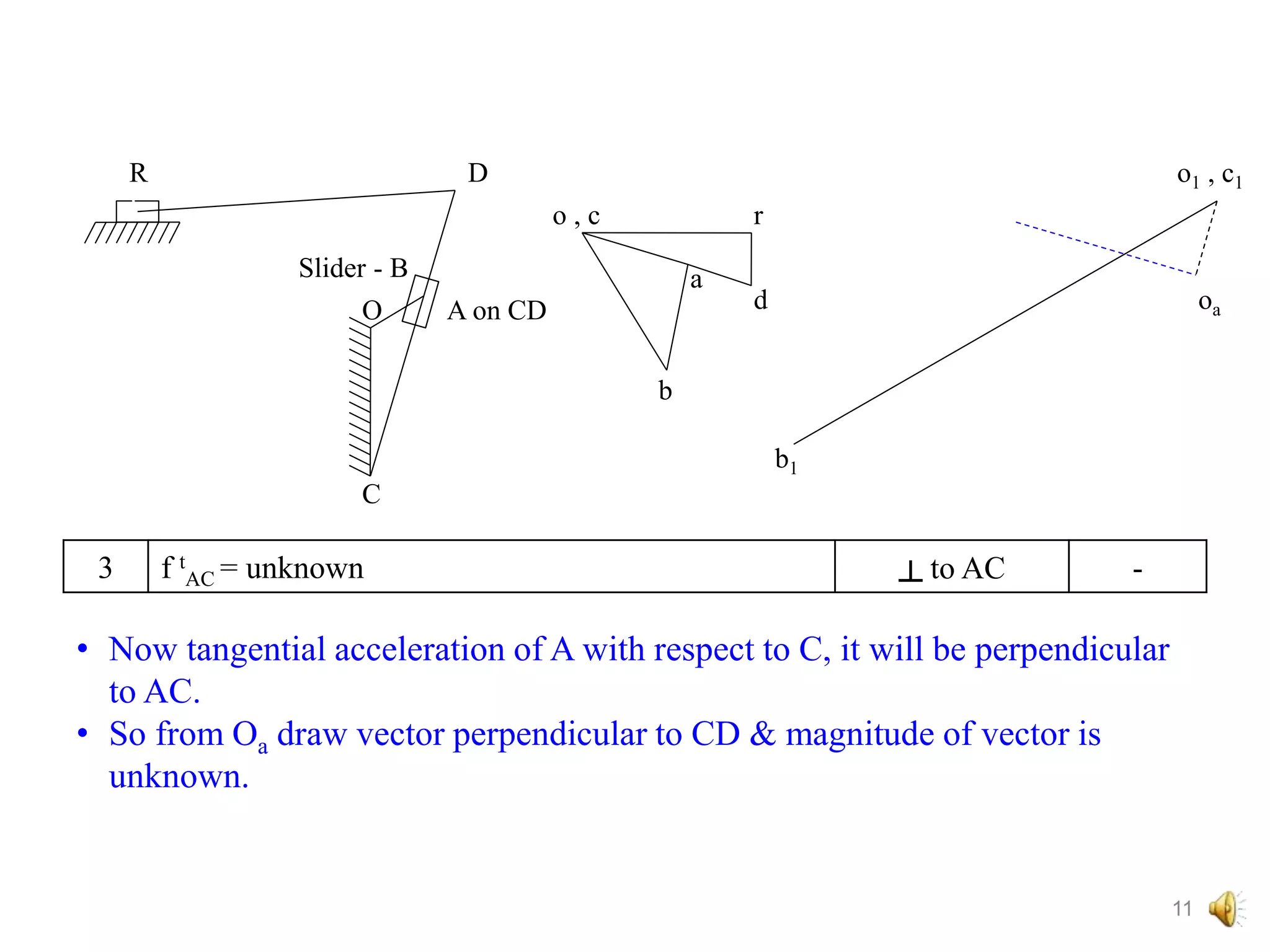
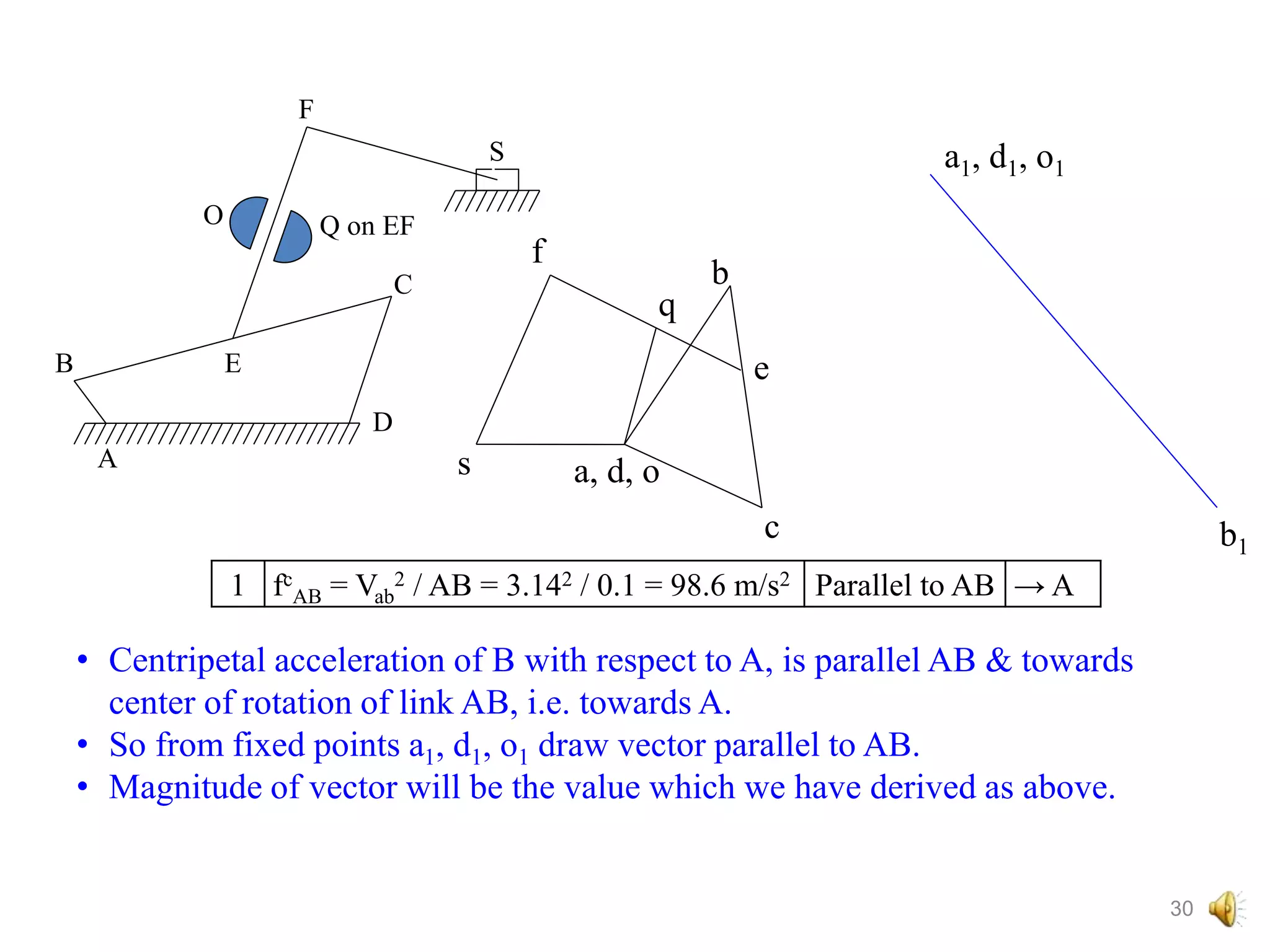
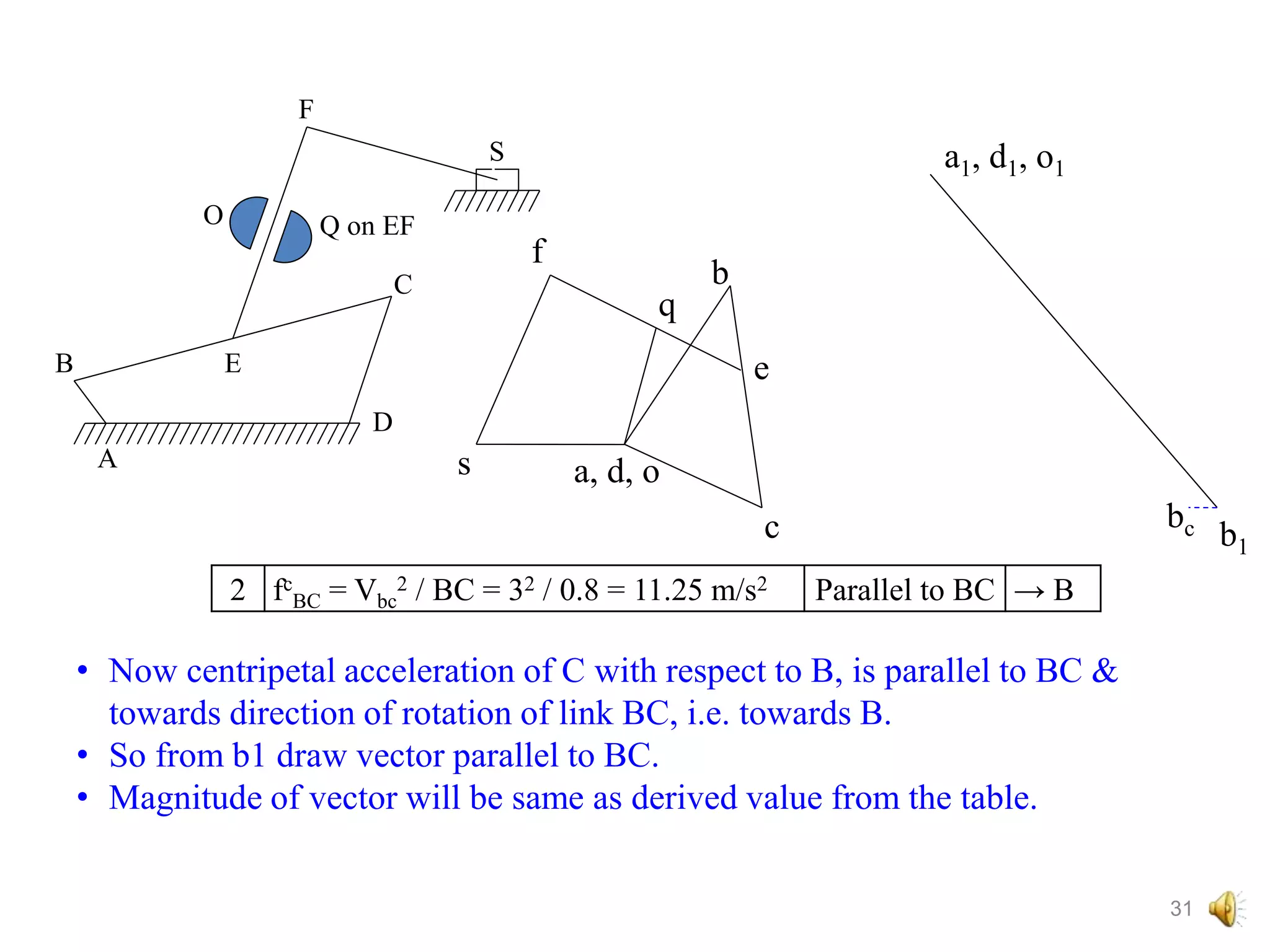
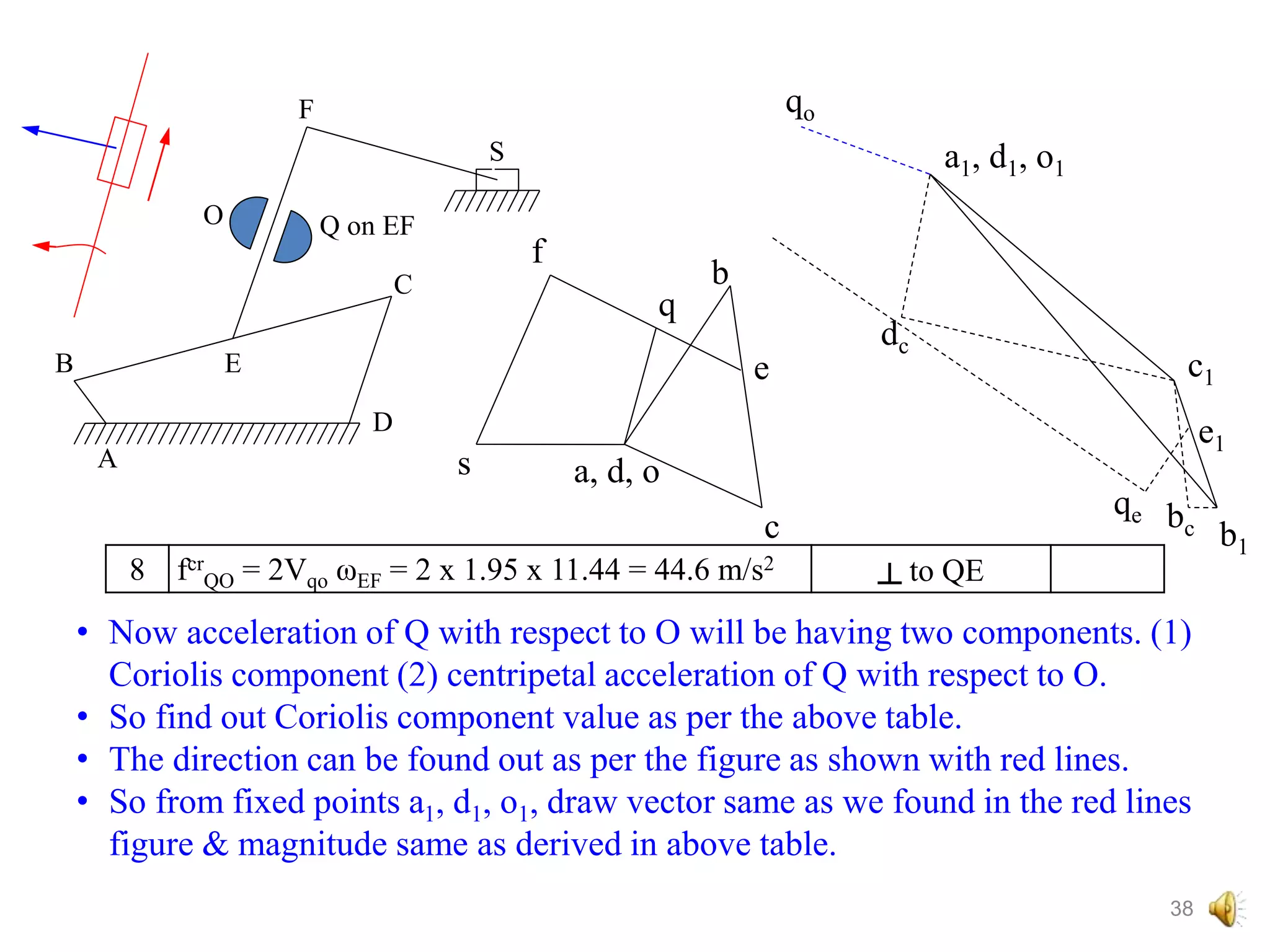
4. Draw acceleration vectors in the acceleration diagram showing centripetal, tangential, and coriolis accelerations of all points.