Download as PDF, PPTX
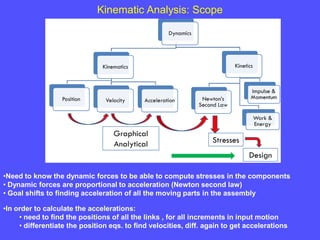
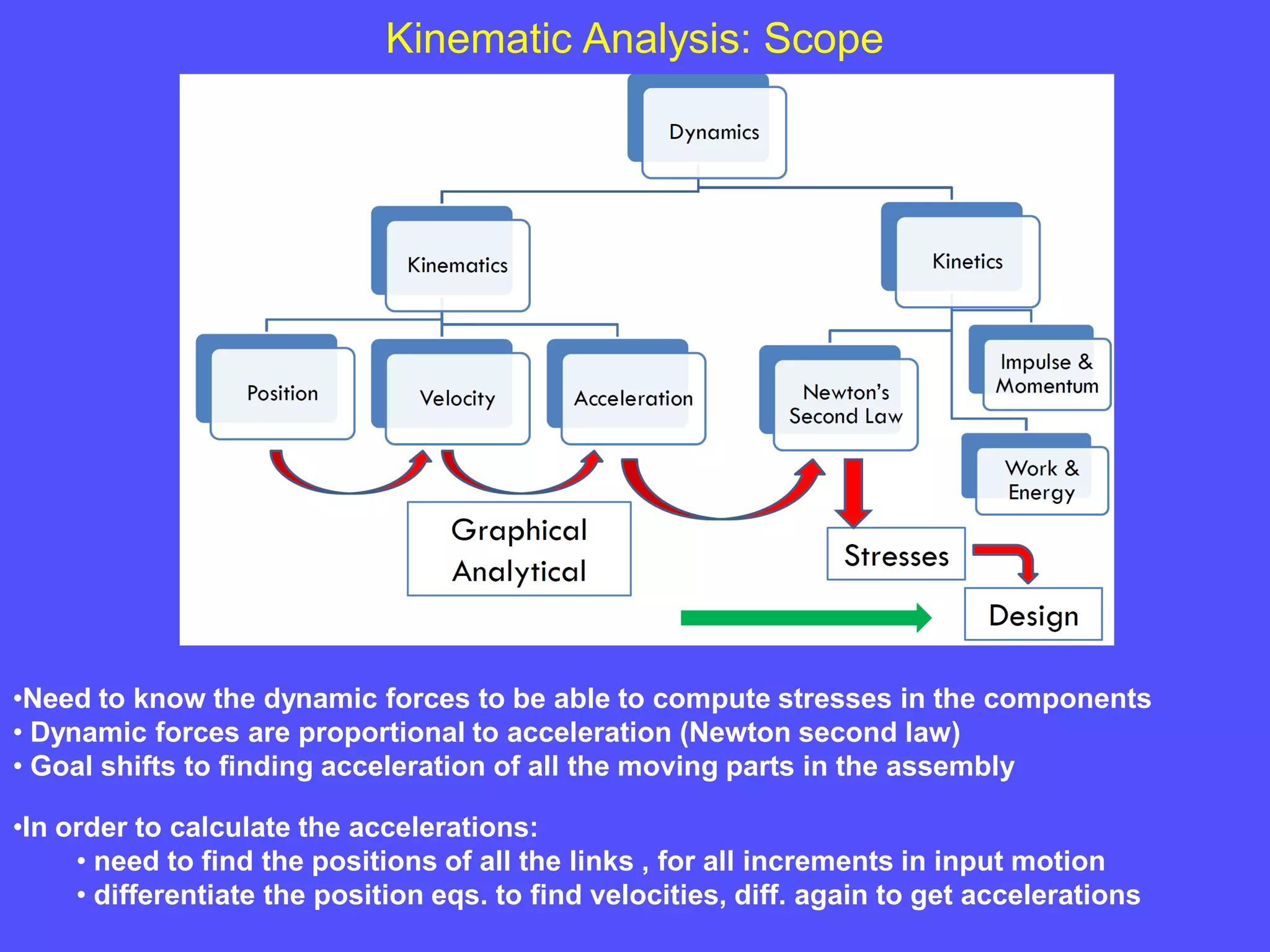
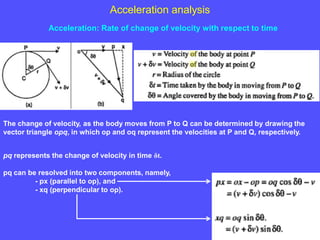
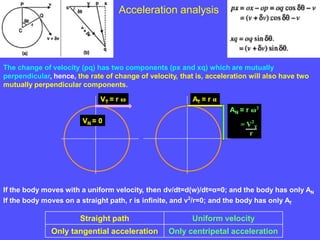
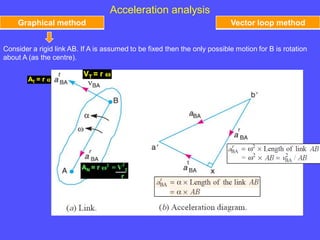
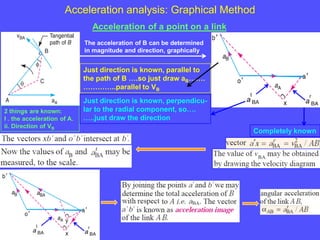
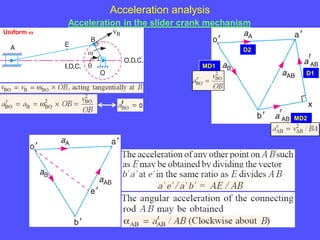
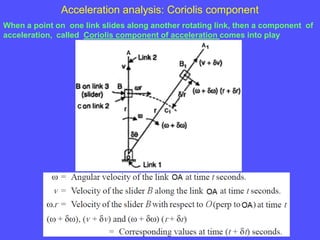
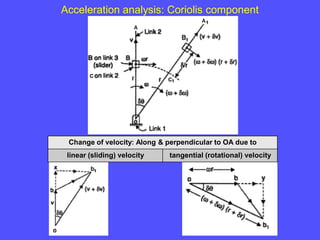
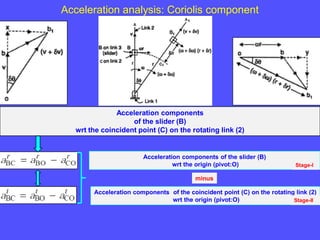
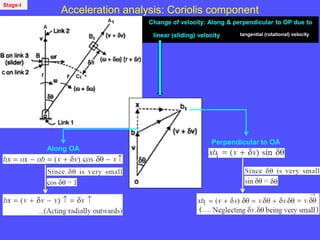
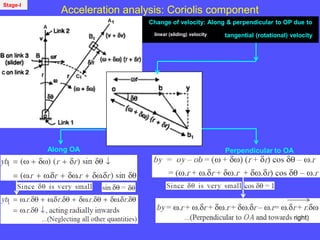
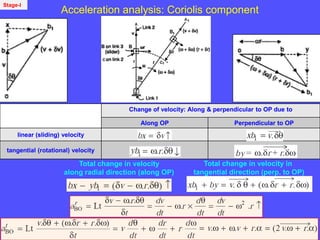
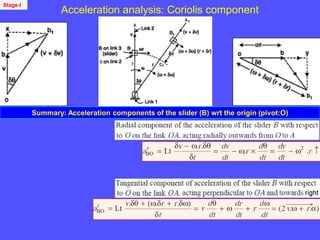
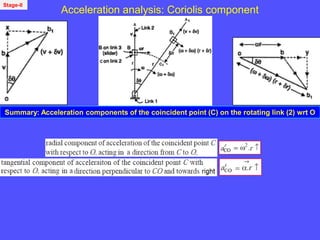
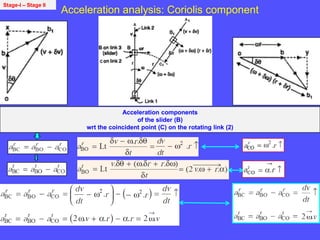
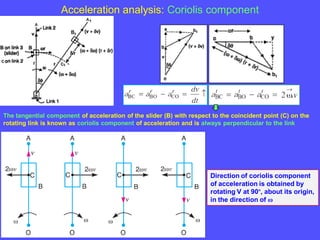
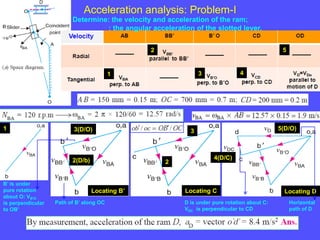
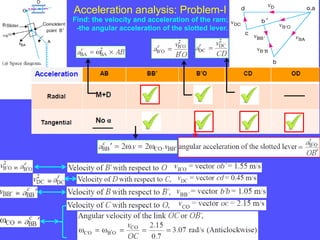
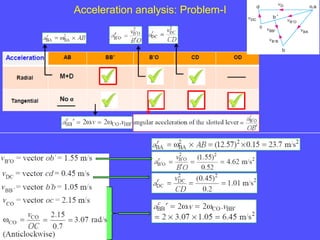
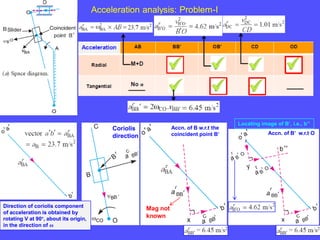
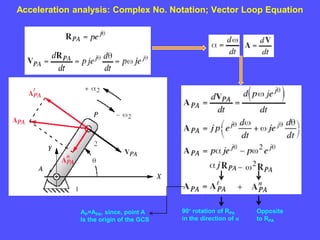
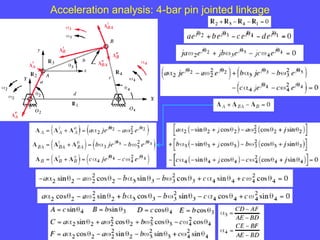
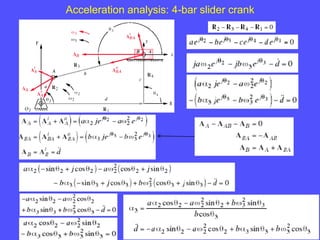
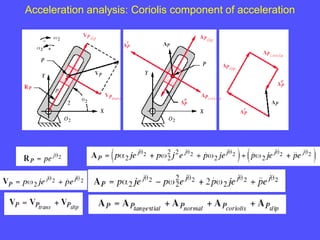
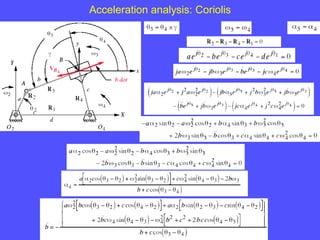
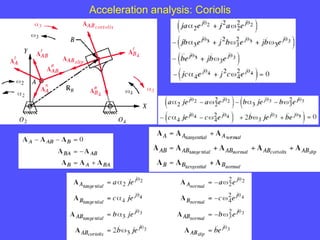

1) To analyze accelerations, positions must first be found to calculate velocities by differentiation and accelerations by further differentiation. 2) Acceleration has two components - tangential and centripetal. For uniform motion only centripetal acceleration exists, and for straight-line motion only tangential acceleration exists. 3) The Coriolis component arises for points moving on rotating links and is perpendicular to the link and proportional to the product of linear and angular velocities.




























































