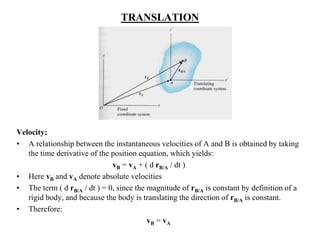
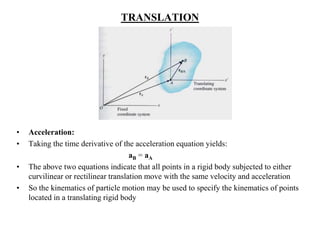
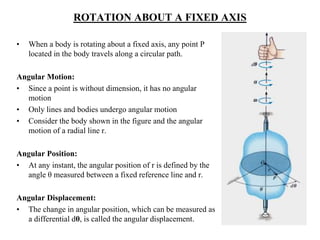
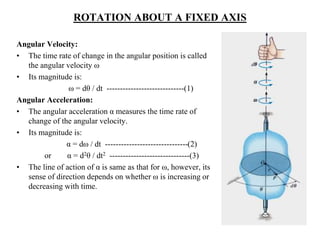
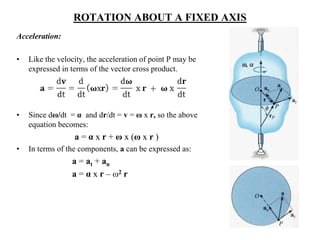
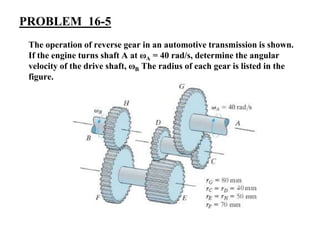
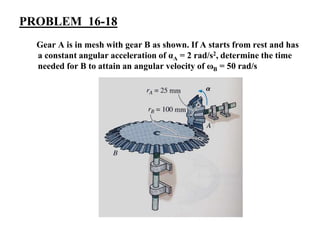
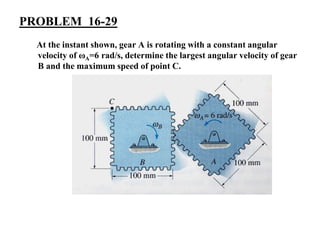
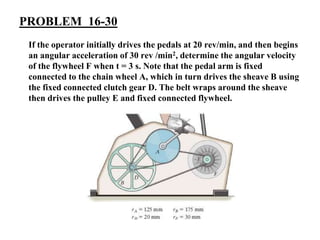
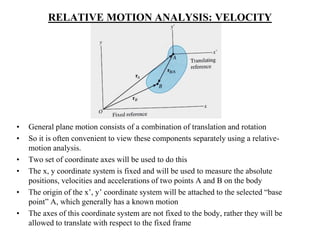
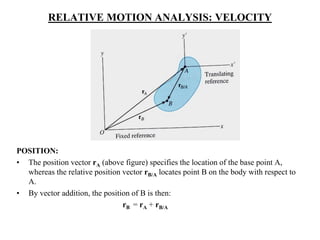
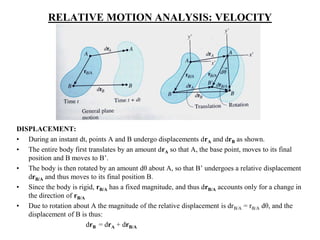
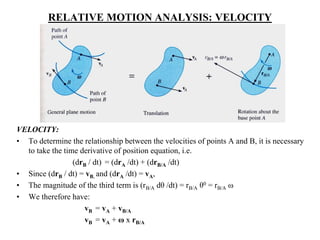
This document discusses planar kinematics of rigid bodies. It describes three types of planar rigid body motion: translation, rotation about a fixed axis, and general plane motion which is a combination of translation and rotation. Translation and rotation about a fixed axis are analyzed in detail. Translation results in all points of the rigid body having equal velocities and accelerations. During rotation about a fixed axis, a point's velocity is equal to the product of the angular velocity and distance from the axis of rotation, and its acceleration has both tangential and normal components. Relative motion analysis using two coordinate systems is introduced to analyze general plane rigid body motion.