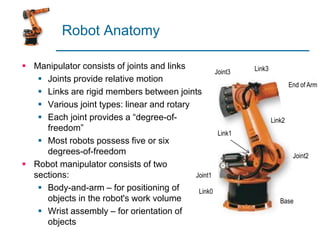
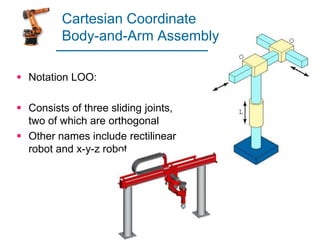
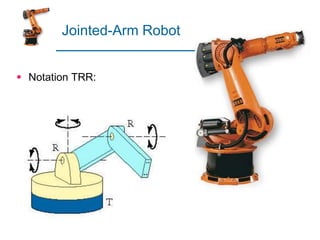
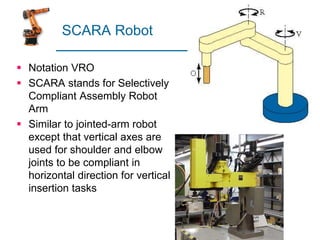
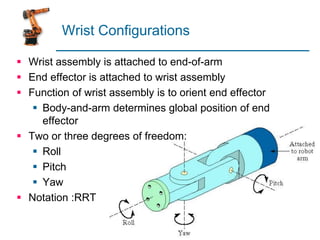
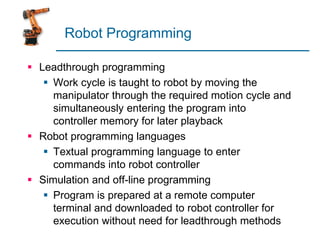
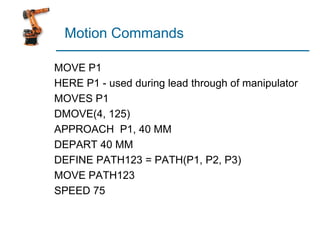
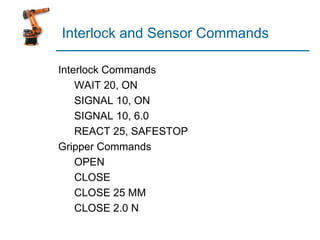
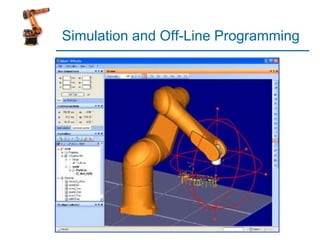
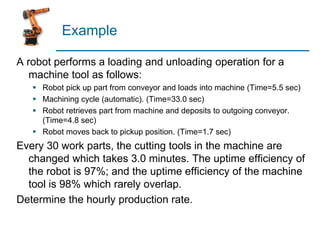
This document discusses industrial robotics, including robot anatomy, control systems, end effectors, applications, and programming. It describes the typical components of an industrial robot, such as joints, links, and degrees of freedom. Common robot configurations and their joint notation are presented. The document also covers robot control systems, end effectors, applications in material handling and processing, and programming methods like leadthrough and offline programming.