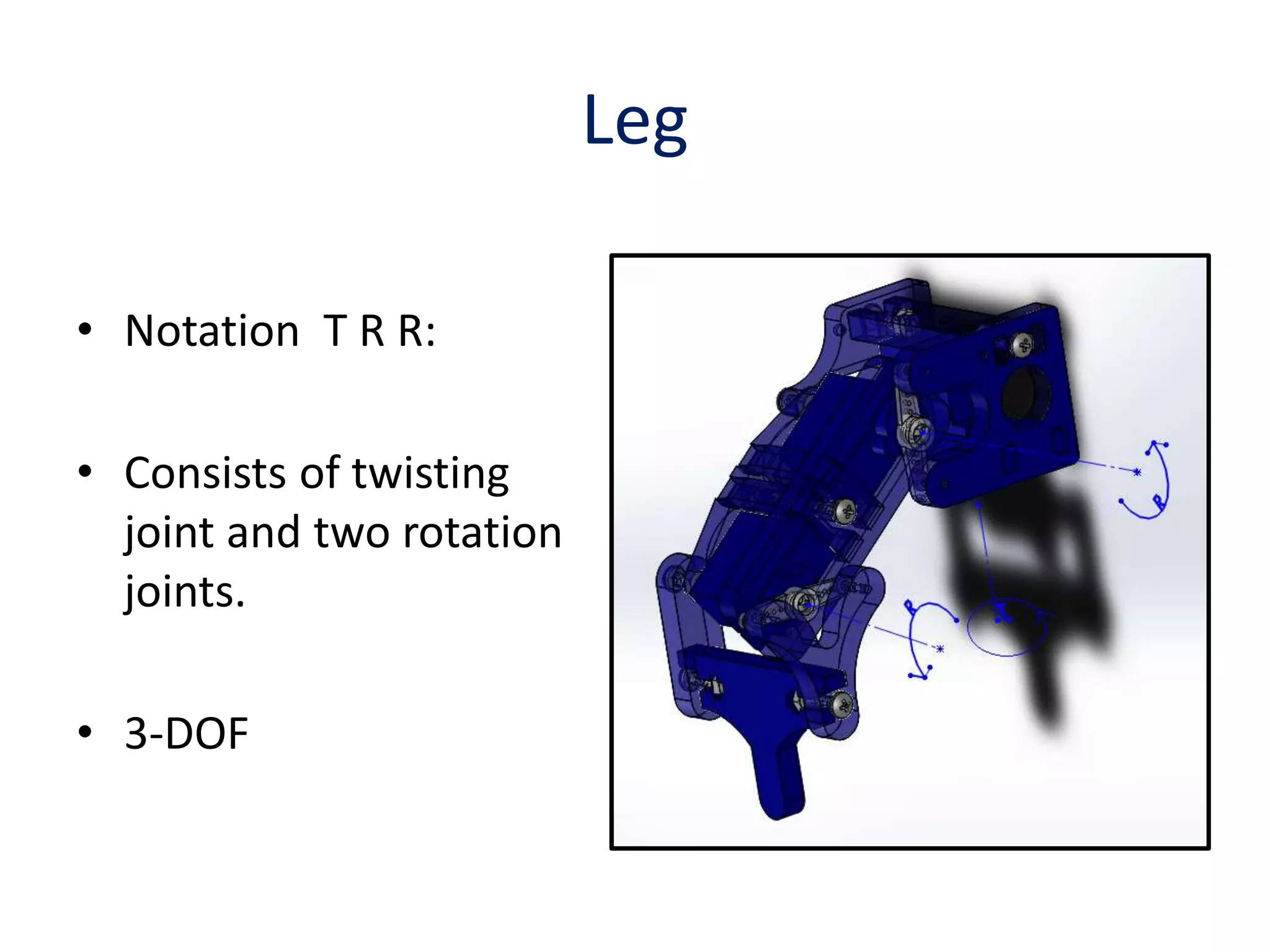
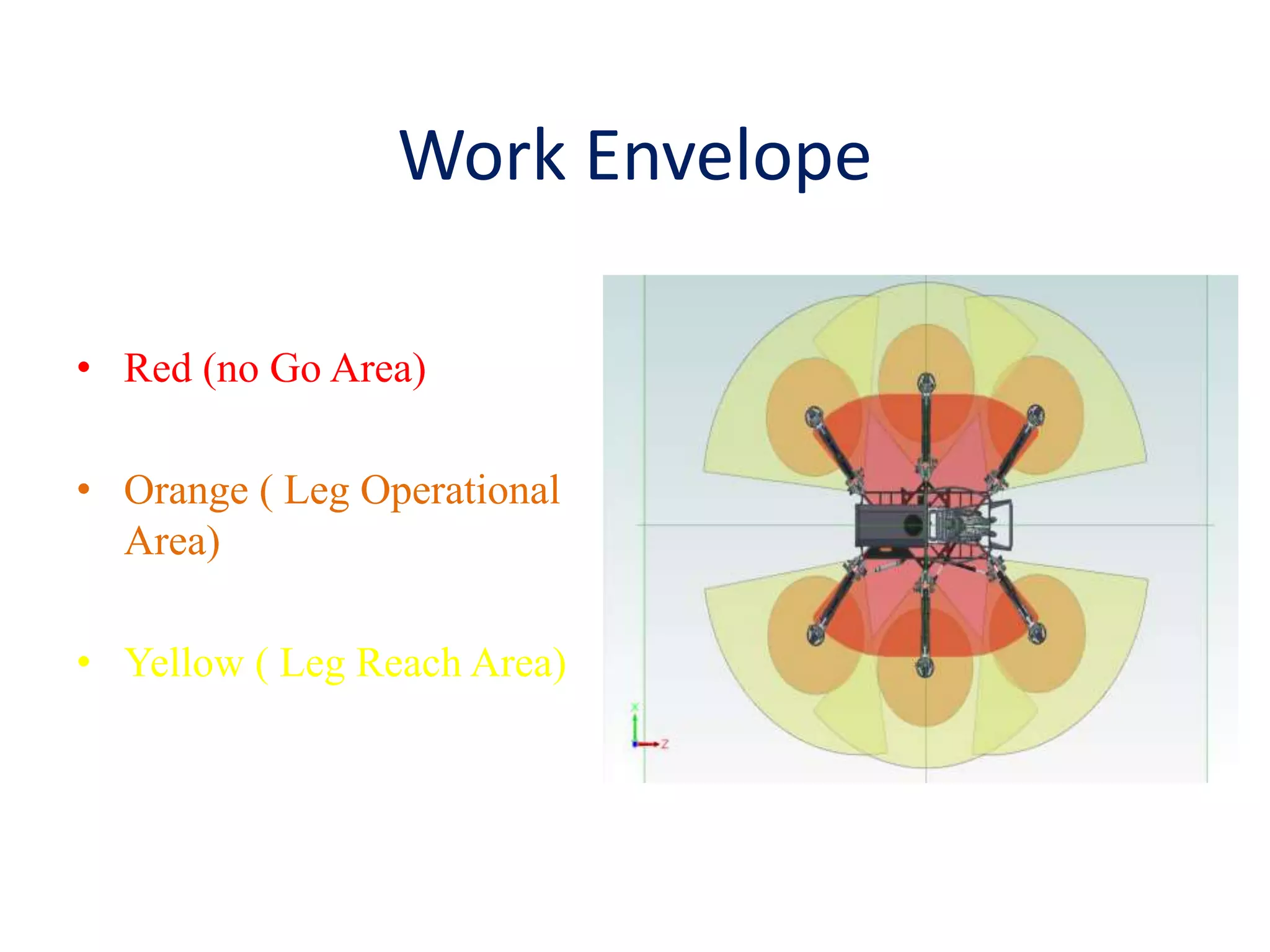
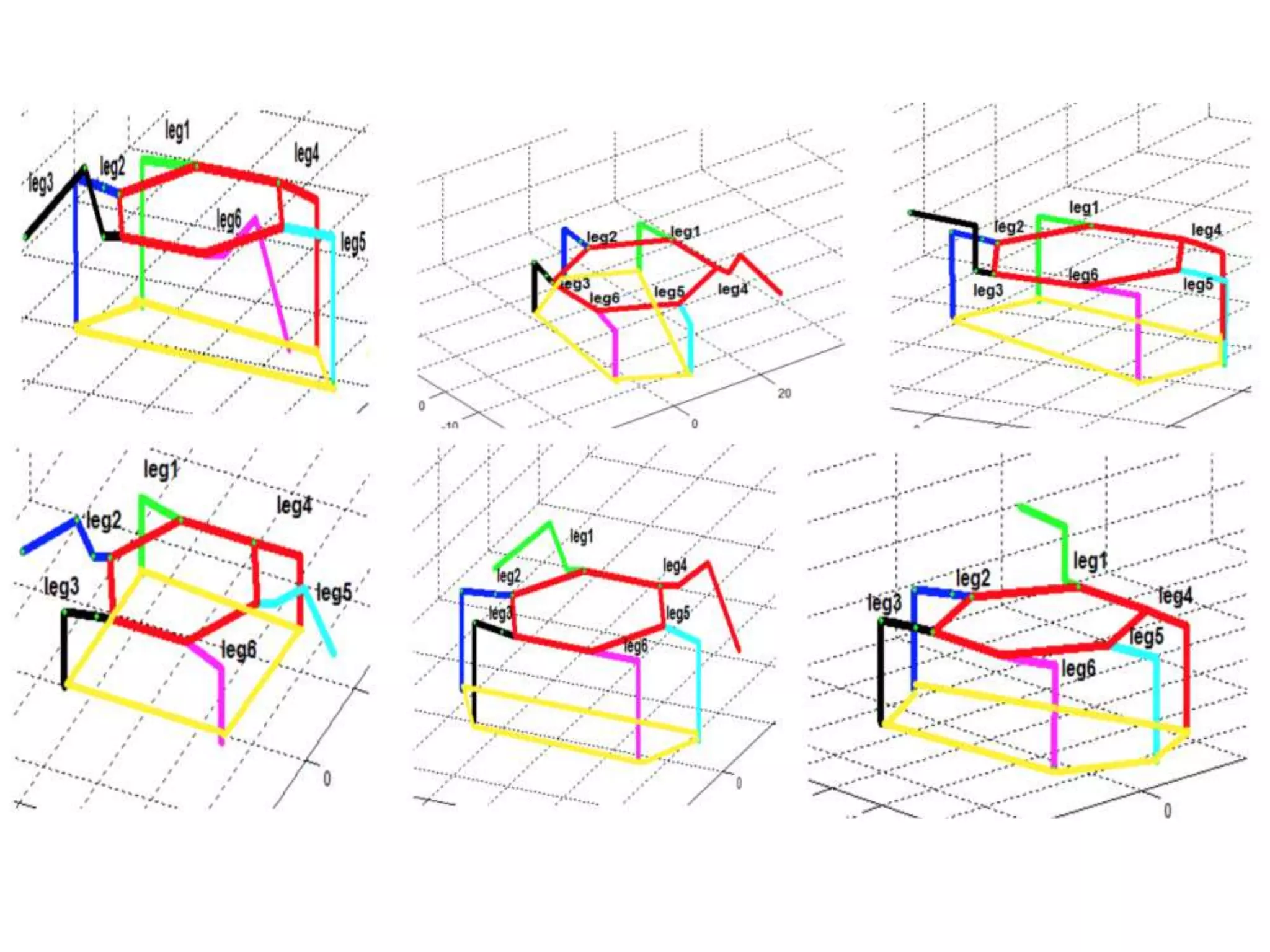
This document discusses the design and capabilities of a hexapod robot. It consists of 6 legs, each with 3 degrees of freedom, for a total of 18 degrees of freedom. The robot can perform basic tasks like walking forward and backward, as well as rotating. Hexapod robots have applications in areas like flight simulators, search and rescue, manufacturing, and antenna positioning. Their advantages include stability, maneuverability, and robustness compared to other legged and wheeled robots.