This document provides an overview of digital image processing techniques for image restoration. It defines image restoration as improving a degraded image using prior knowledge of the degradation process. The goal is to recover the original image by applying an inverse process to the degradation function. Common degradation sources are discussed, along with noise models like Gaussian, salt and pepper, and periodic noise. Spatial and frequency domain filtering techniques are presented for restoration, such as mean, median and inverse filters. The maximum mean square error or Wiener filter is also introduced as a way to minimize restoration error.









![Gaussian / Normal Noise Model
1. Most frequently used.
2. PDF of Gaussian random variable z is given by:
z Gray level
µ Mean of average value of z
σ Standard Deviation of z
σ2 Variance of z
When z is defined by this equation then
About 70% of its values will be in the
range [(µ - σ),(µ + σ)] and
About 95% of its values will be in the
range [(µ - 2σ),(µ + 2σ)]
Plot of function](https://image.slidesharecdn.com/unit3dip-150106055909-conversion-gate02/85/Unit3-dip-12-320.jpg)



















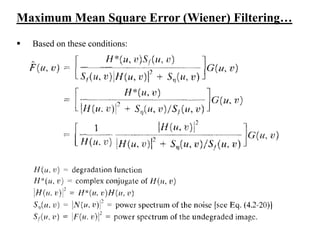
![Inverse Filtering…
Above Equation concludes that:
Even if we know degradation function, we can not recover the undegraded
image [Inverse Fourier Transform of F(u, v)] exactly because
N(u, v) is random function whose Fourier Transform is not known.
If degradation has ZERO or less value then N(u, v) / H(u, v) dominates the
estimated F’(u, v).
No explicit provision for handling Noise.](https://image.slidesharecdn.com/unit3dip-150106055909-conversion-gate02/85/Unit3-dip-38-320.jpg)