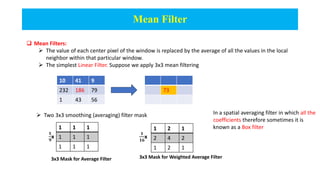
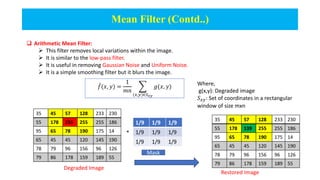
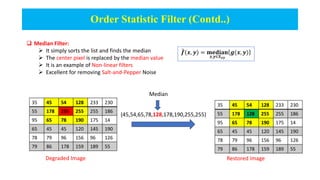
This document discusses various image restoration techniques in the presence of noise. It begins by explaining that image denoising aims to remove noise while retaining important signal features, which can be done through linear or non-linear filtering. It then describes several types of spatial filters that are commonly used for image smoothing, sharpening, and noise removal, including mean filters, order statistic filters, and median filters. It provides details on how various mean filters like arithmetic, geometric, and harmonic mean filters operate and their effectiveness on different noise types. Order statistic filters and median filters are highlighted as being well-suited for salt-and-pepper noise removal. The document also includes examples and equations to illustrate key image restoration concepts.