Download as PDF, PPTX

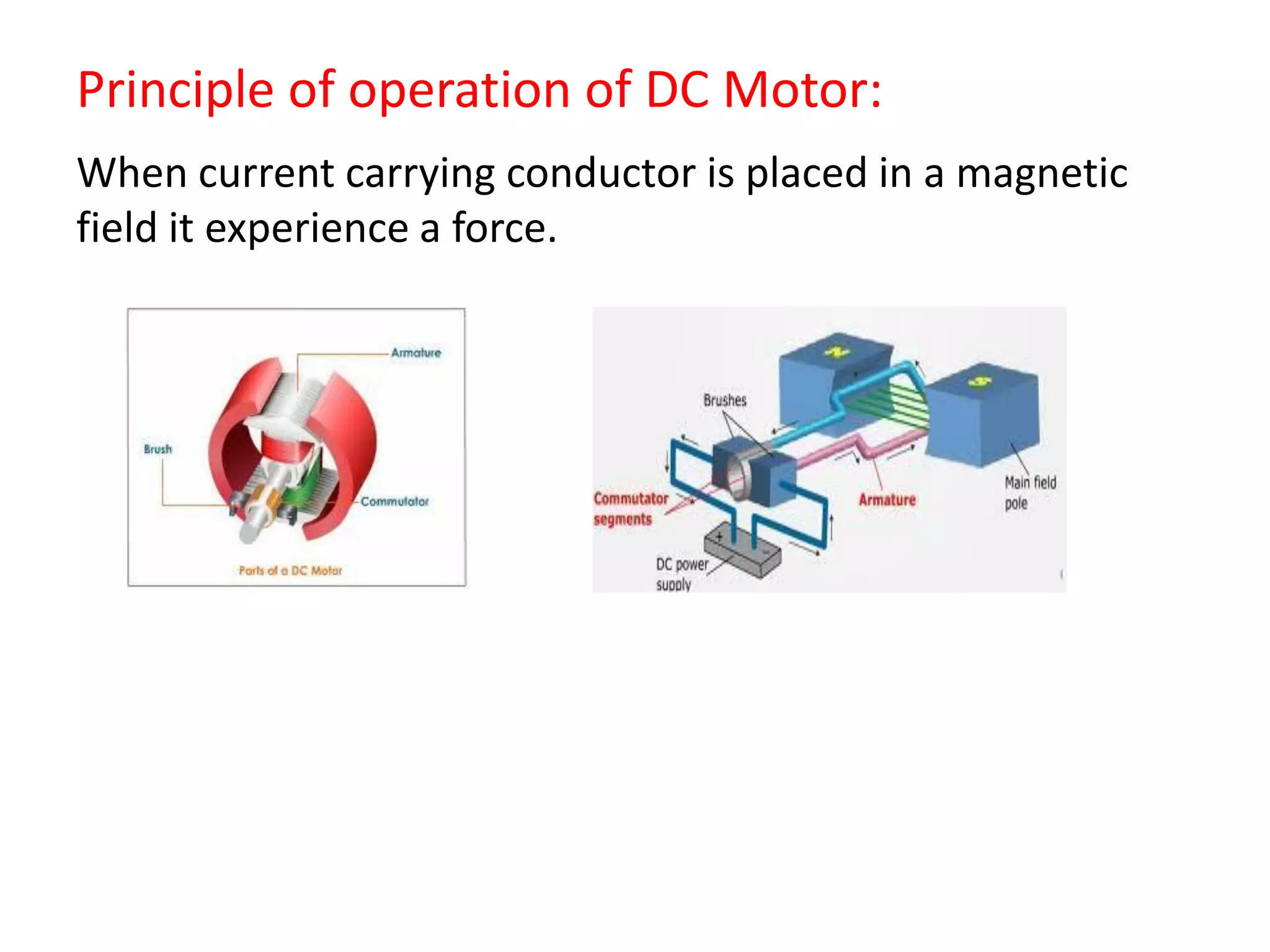
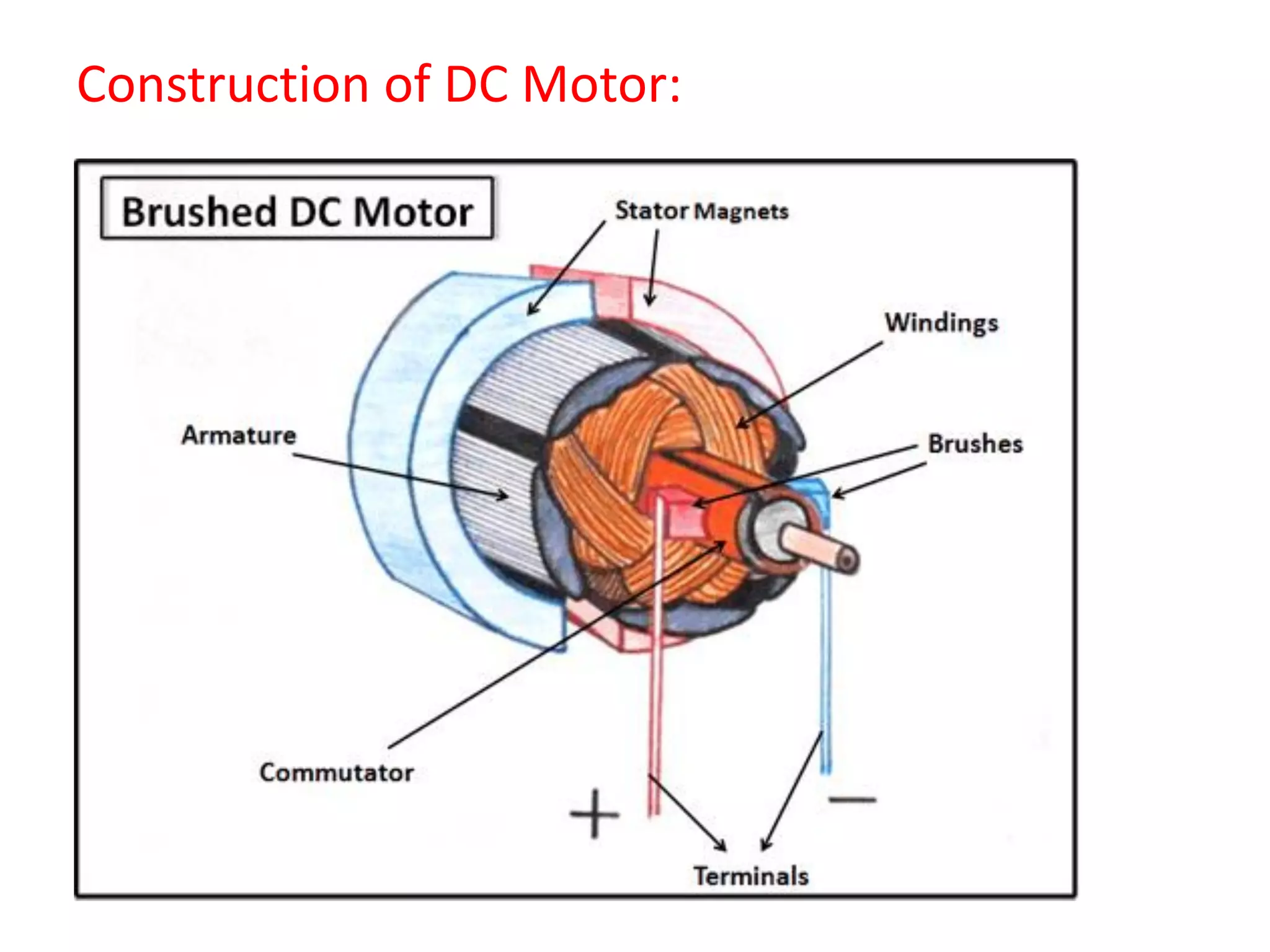
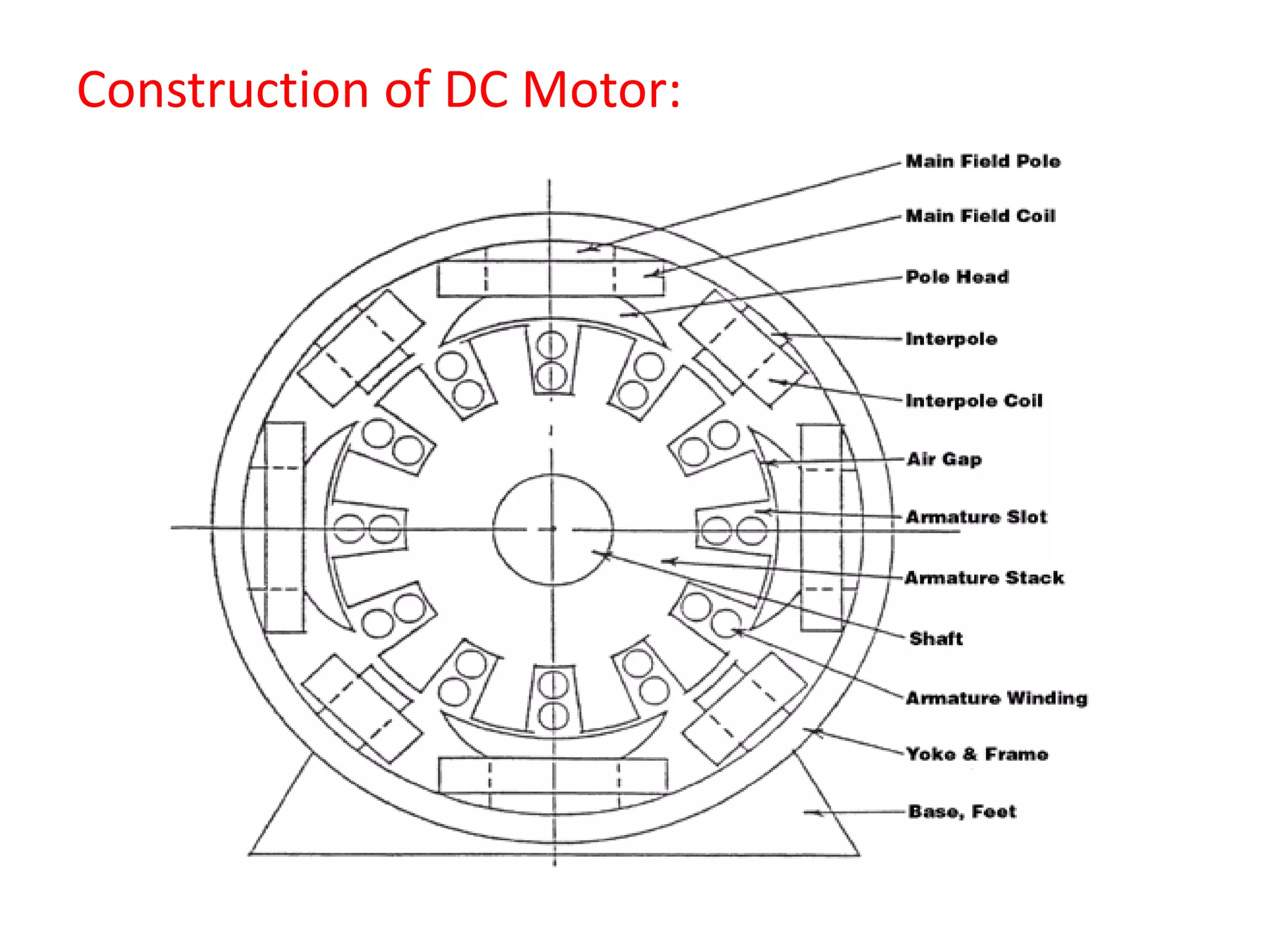
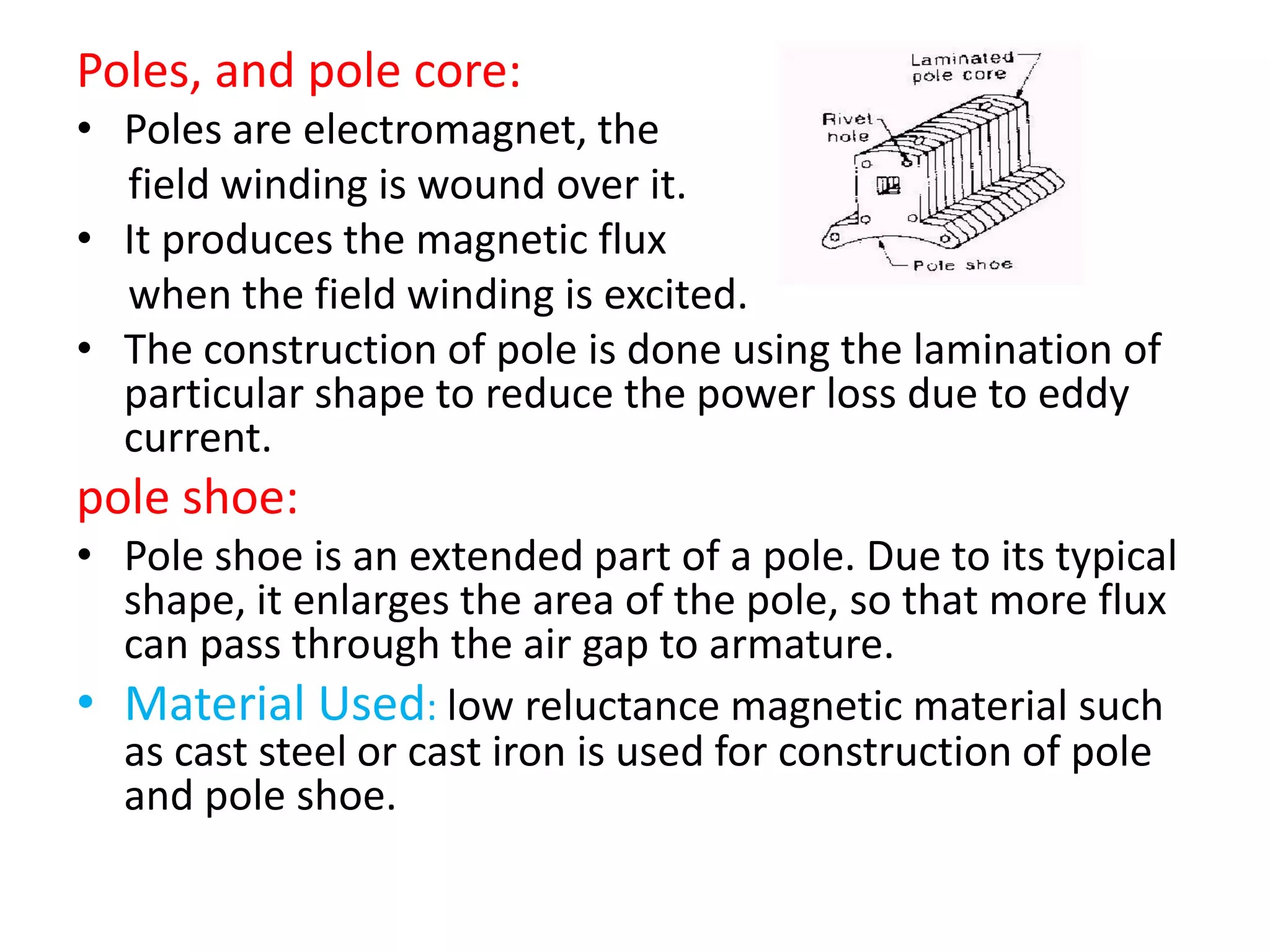
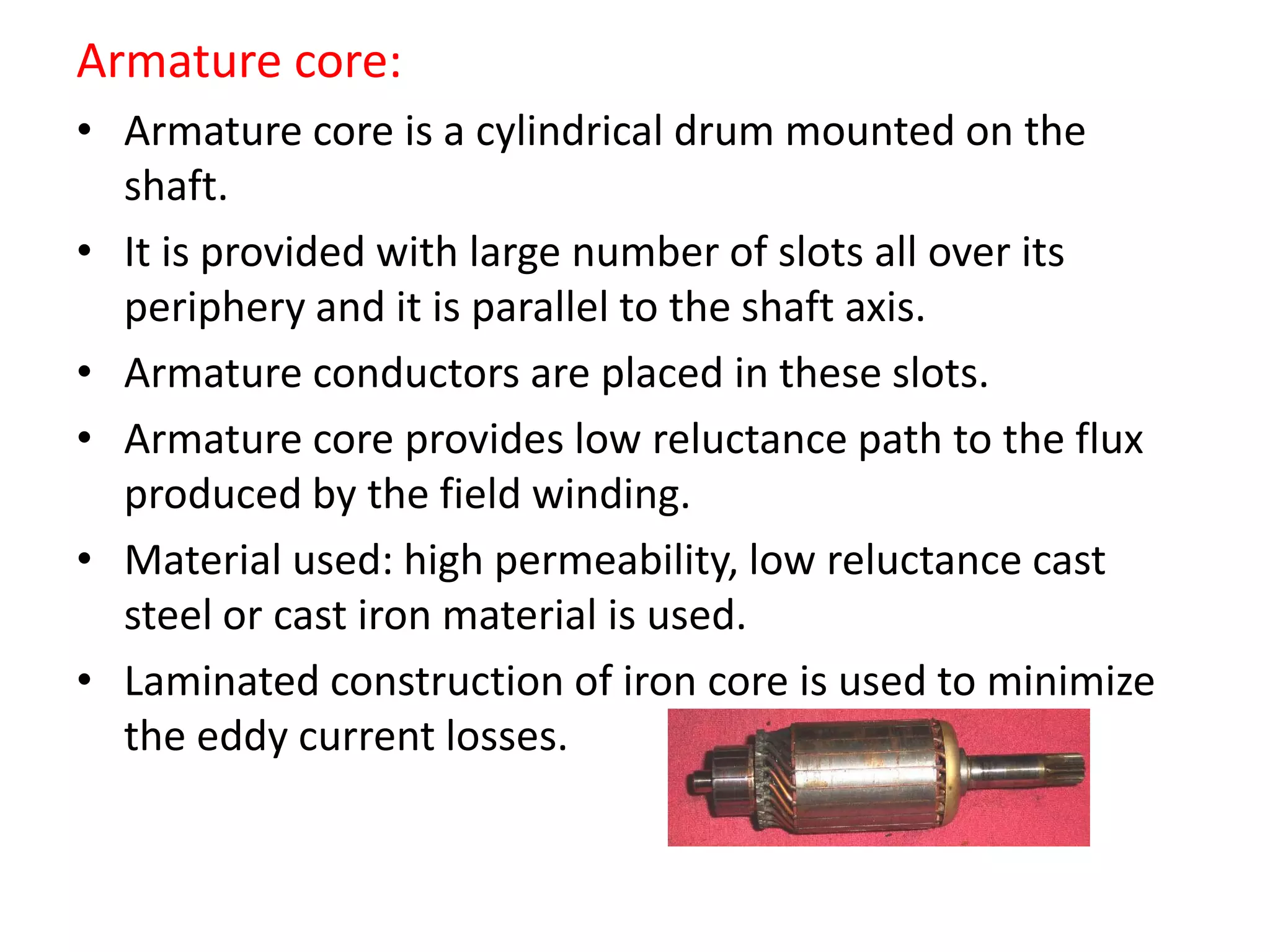
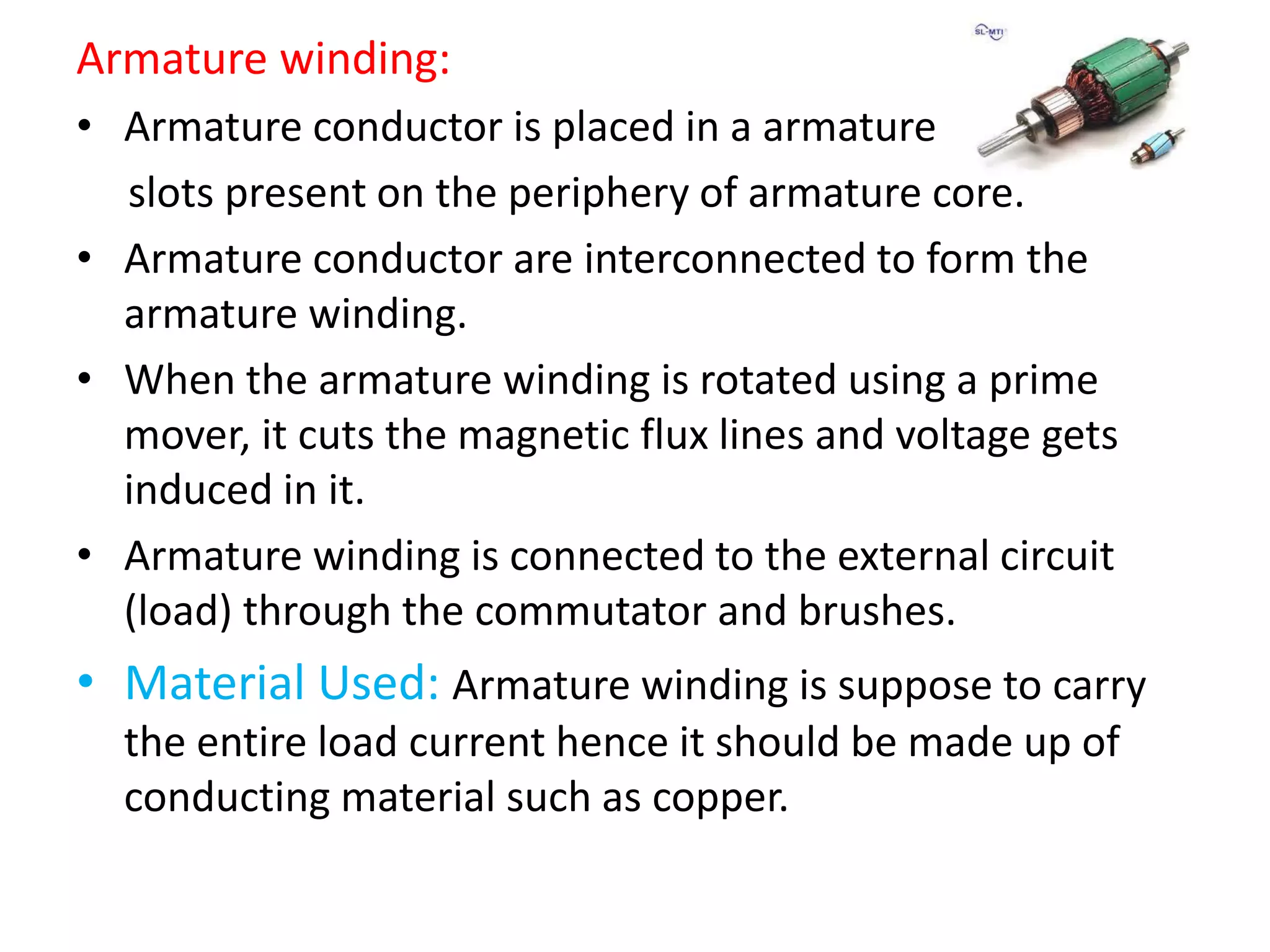
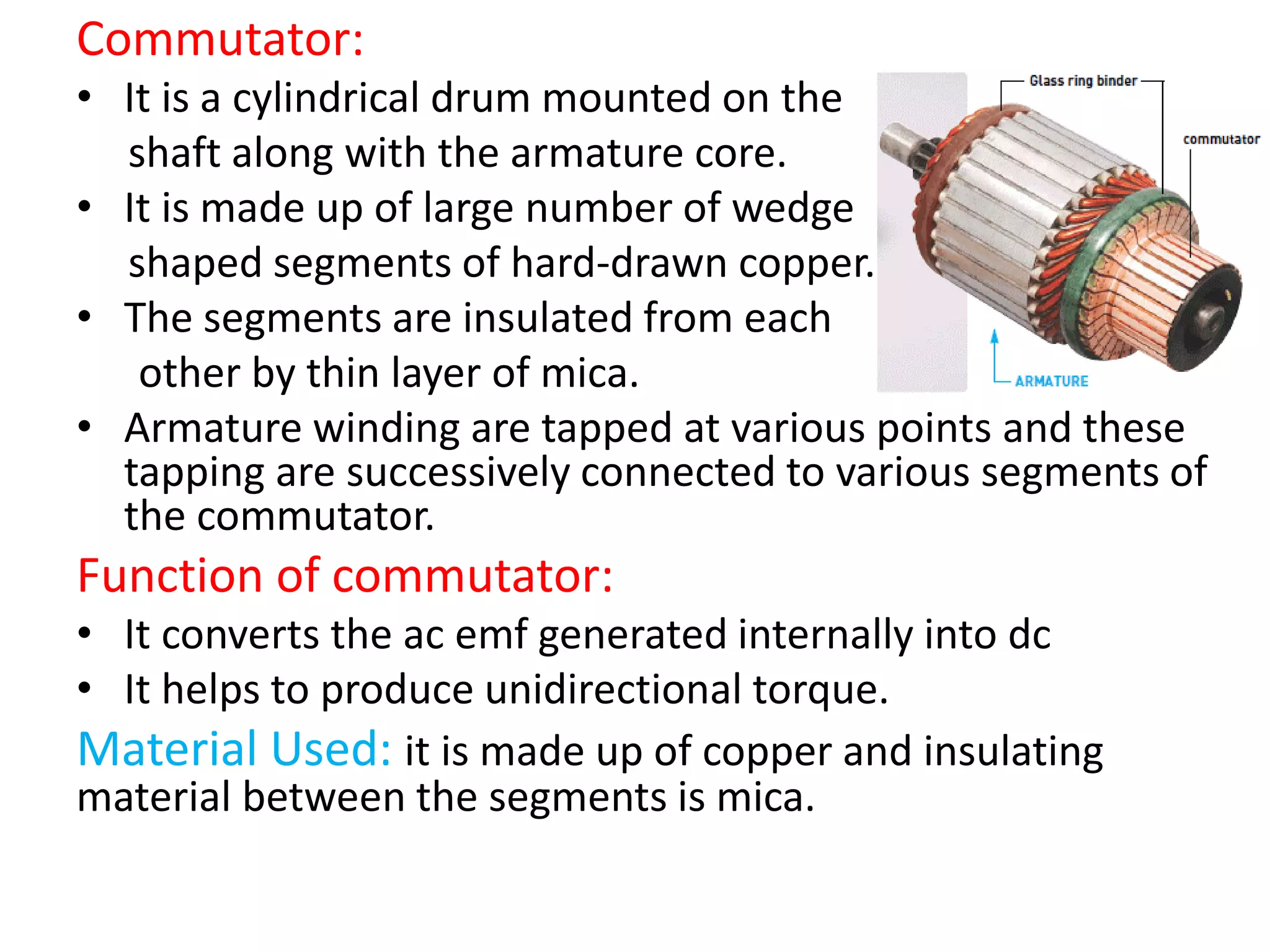
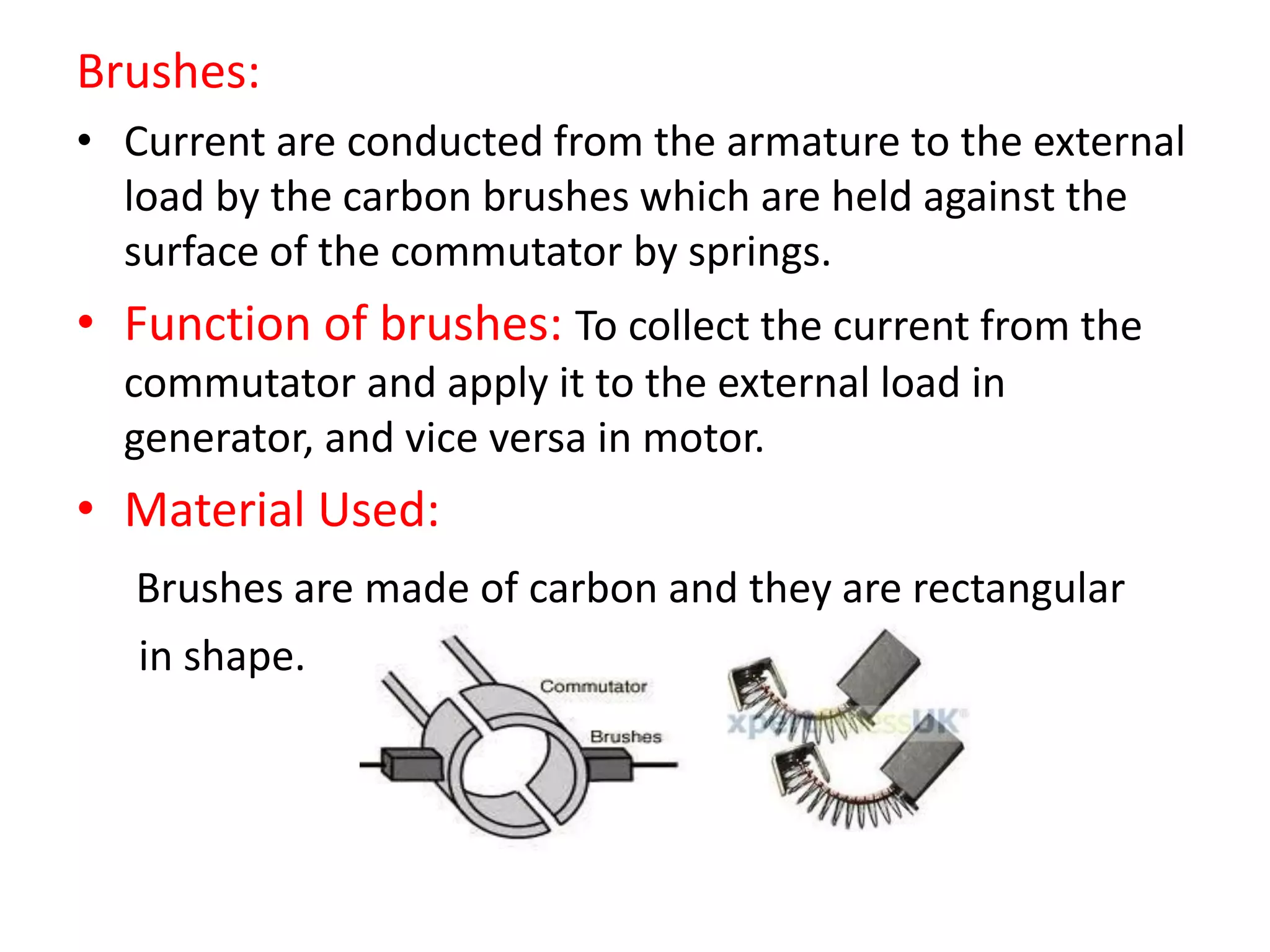
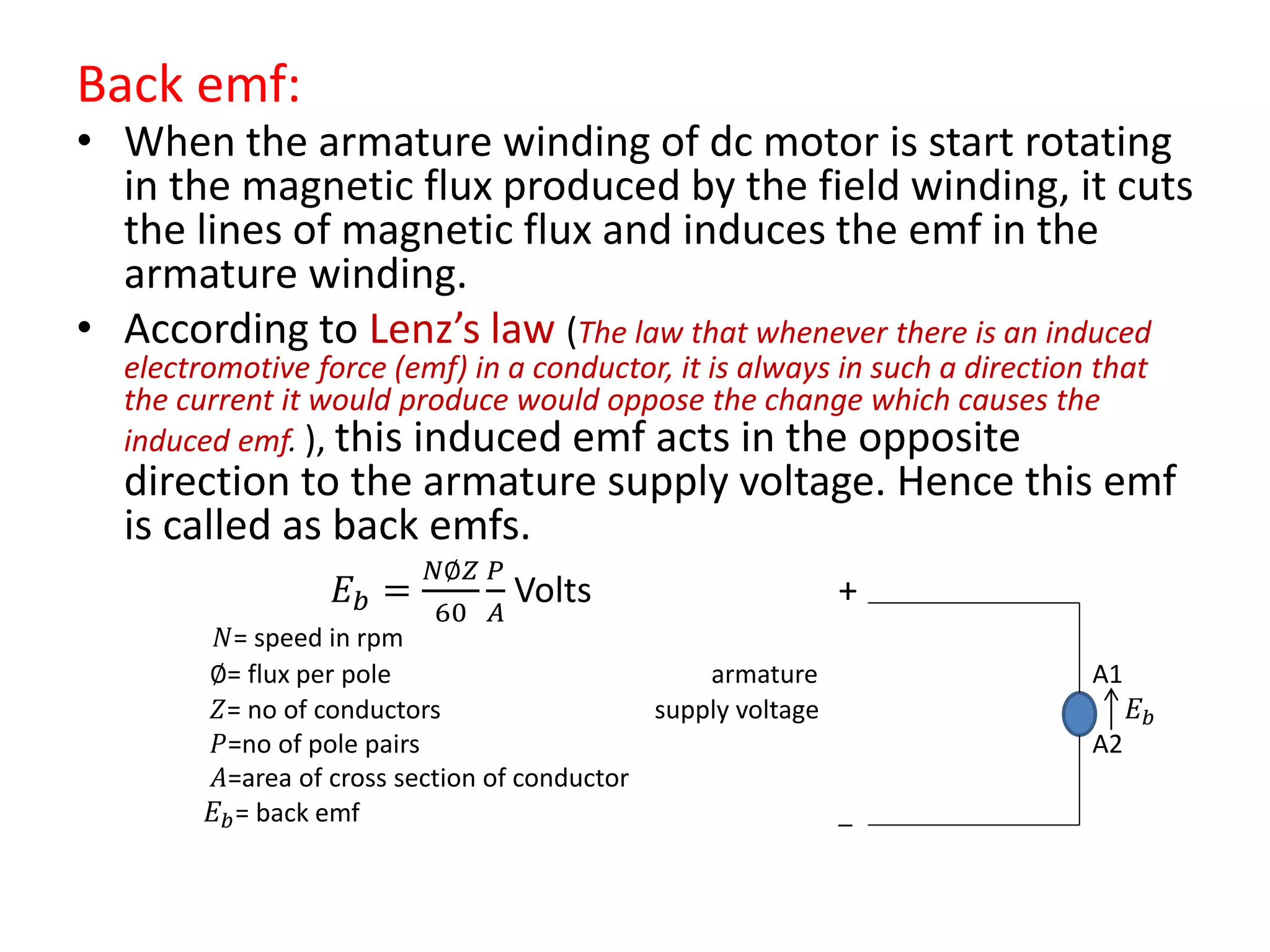
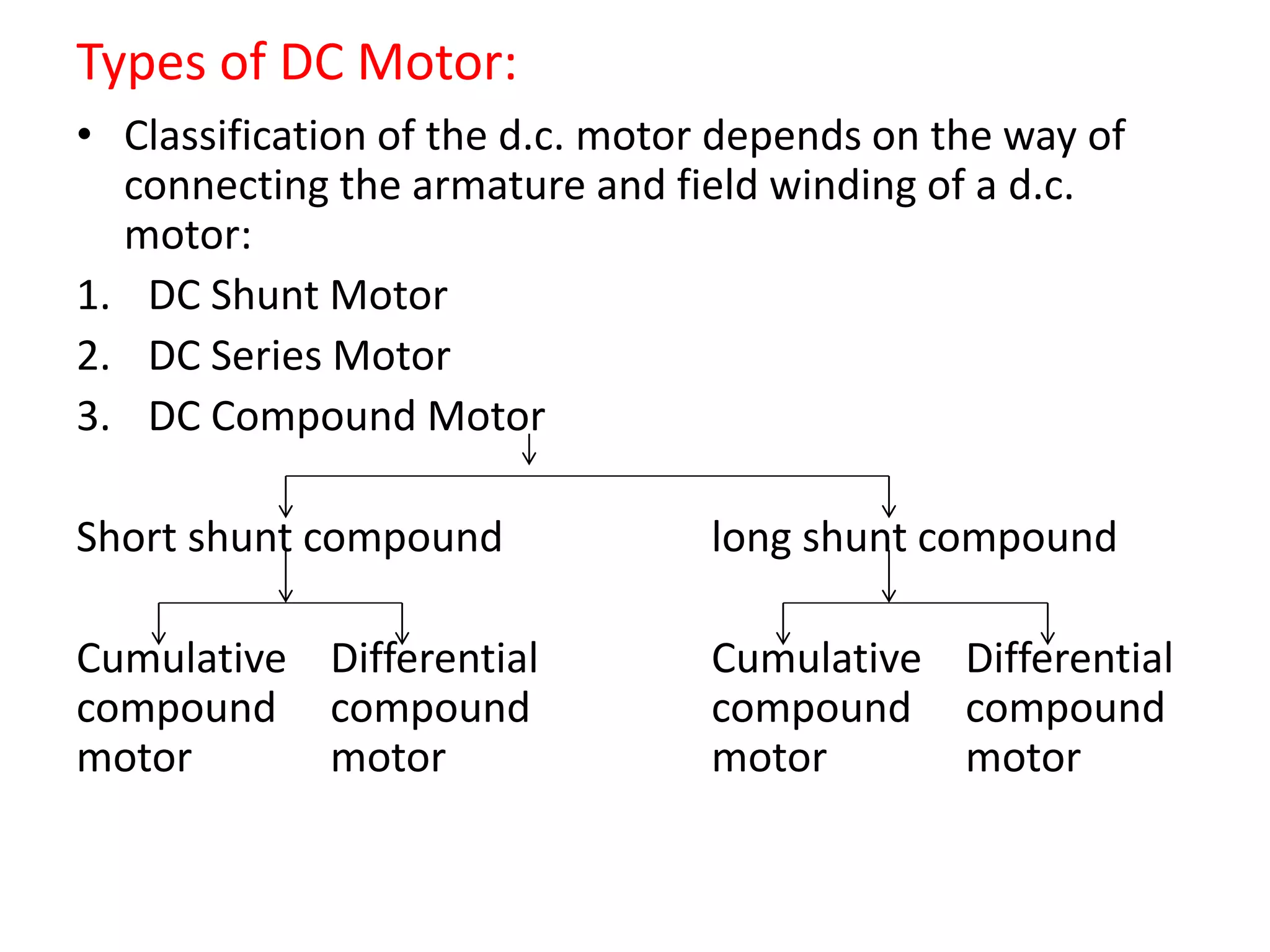
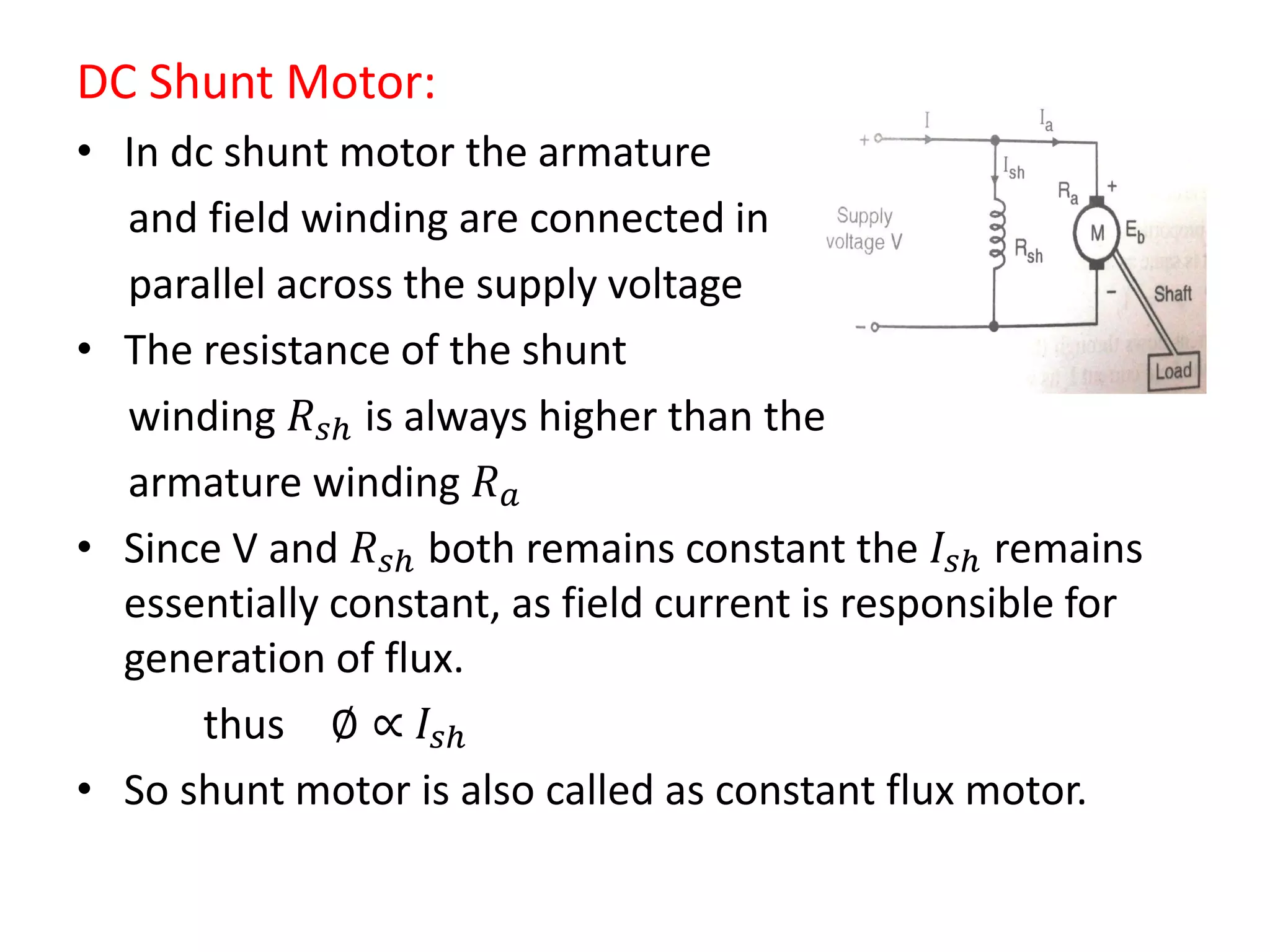

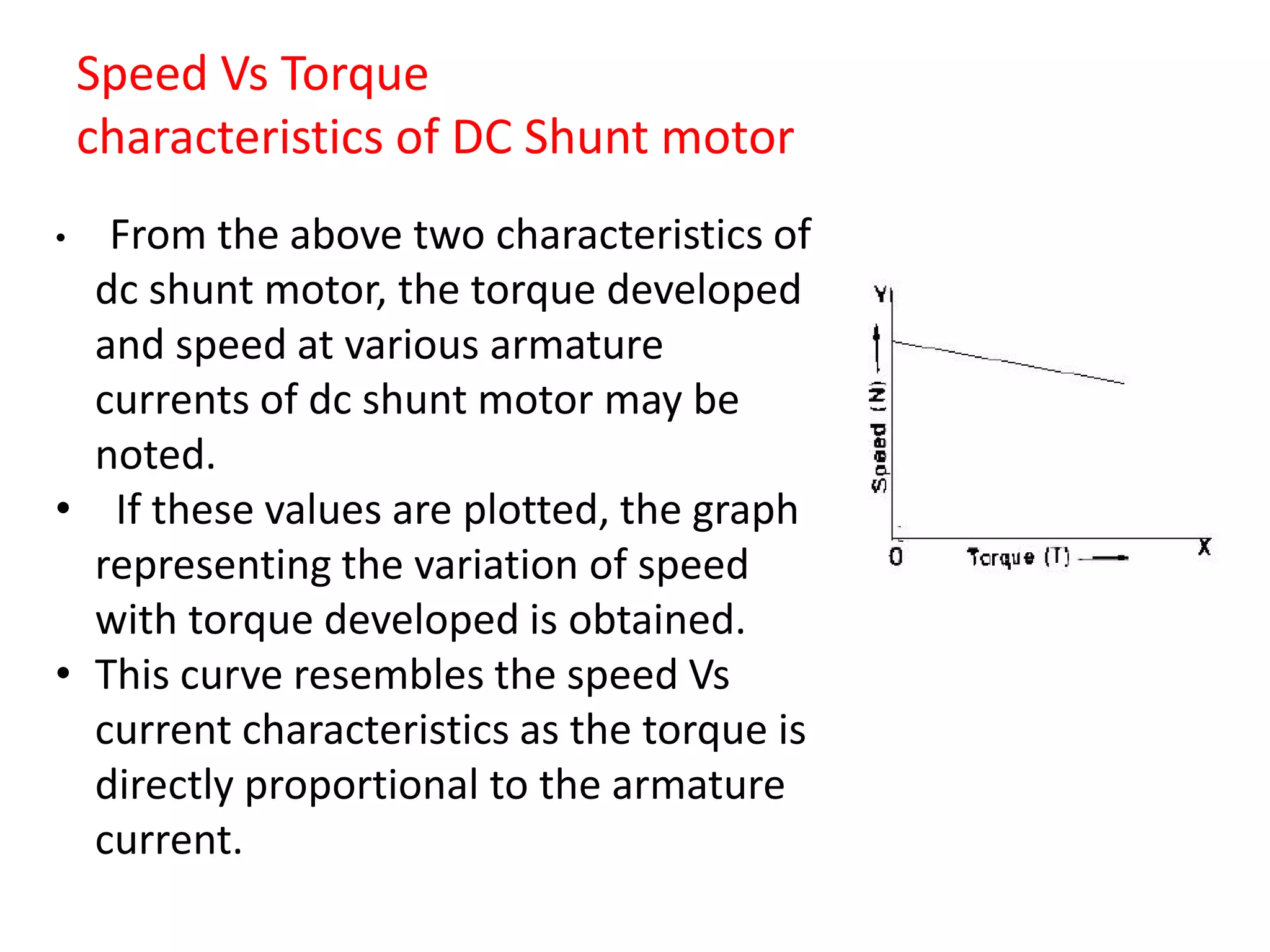
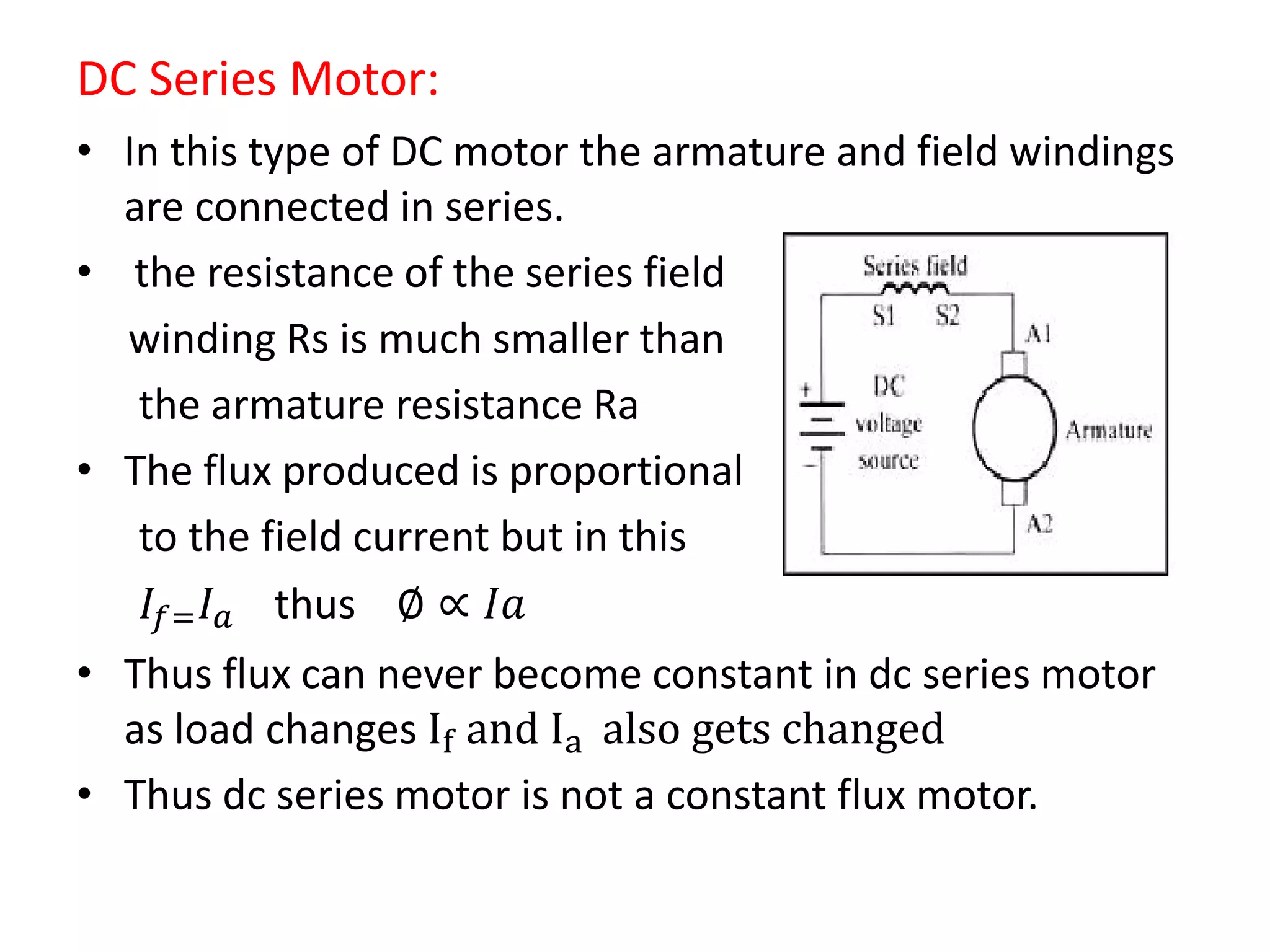
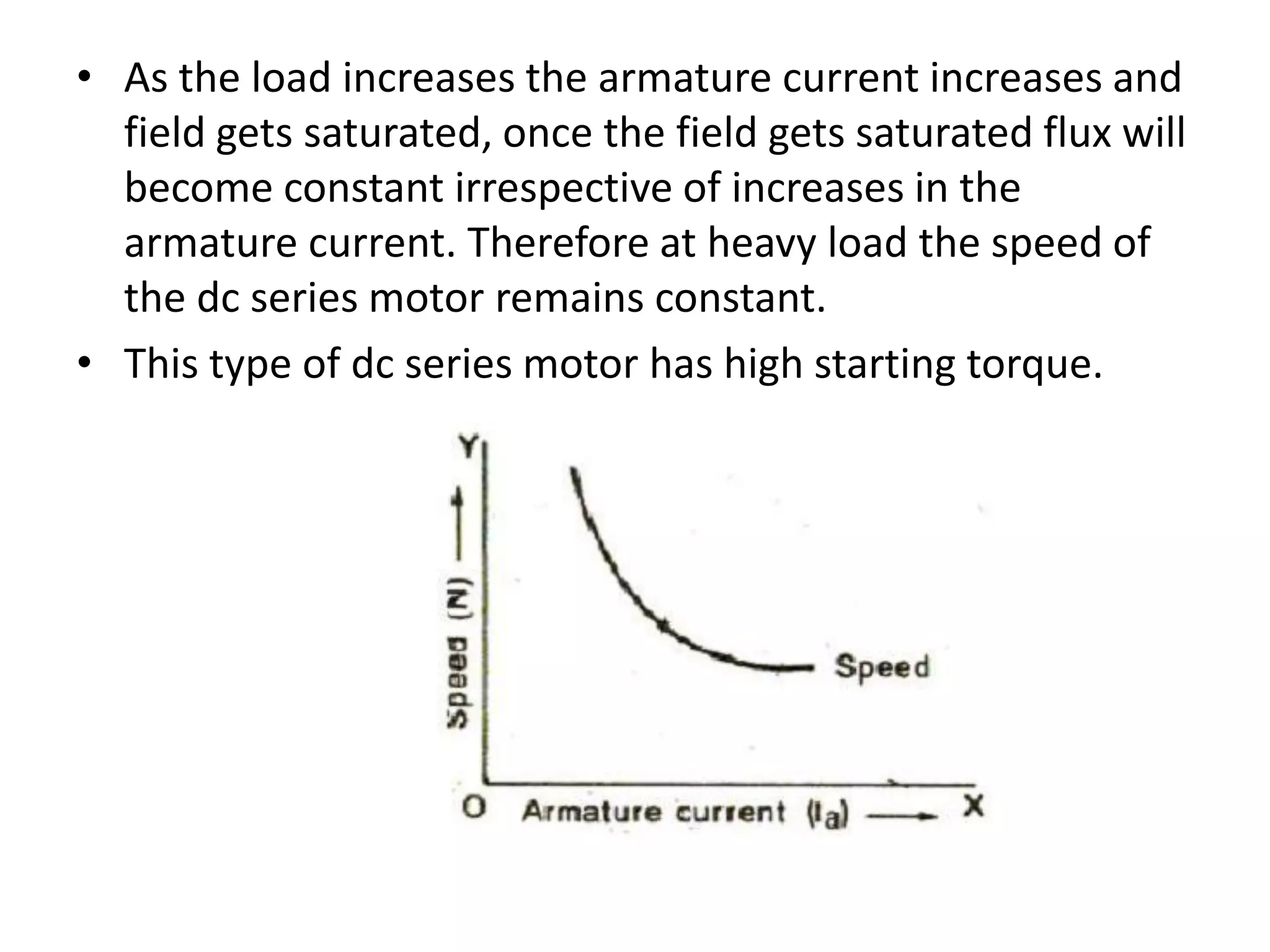
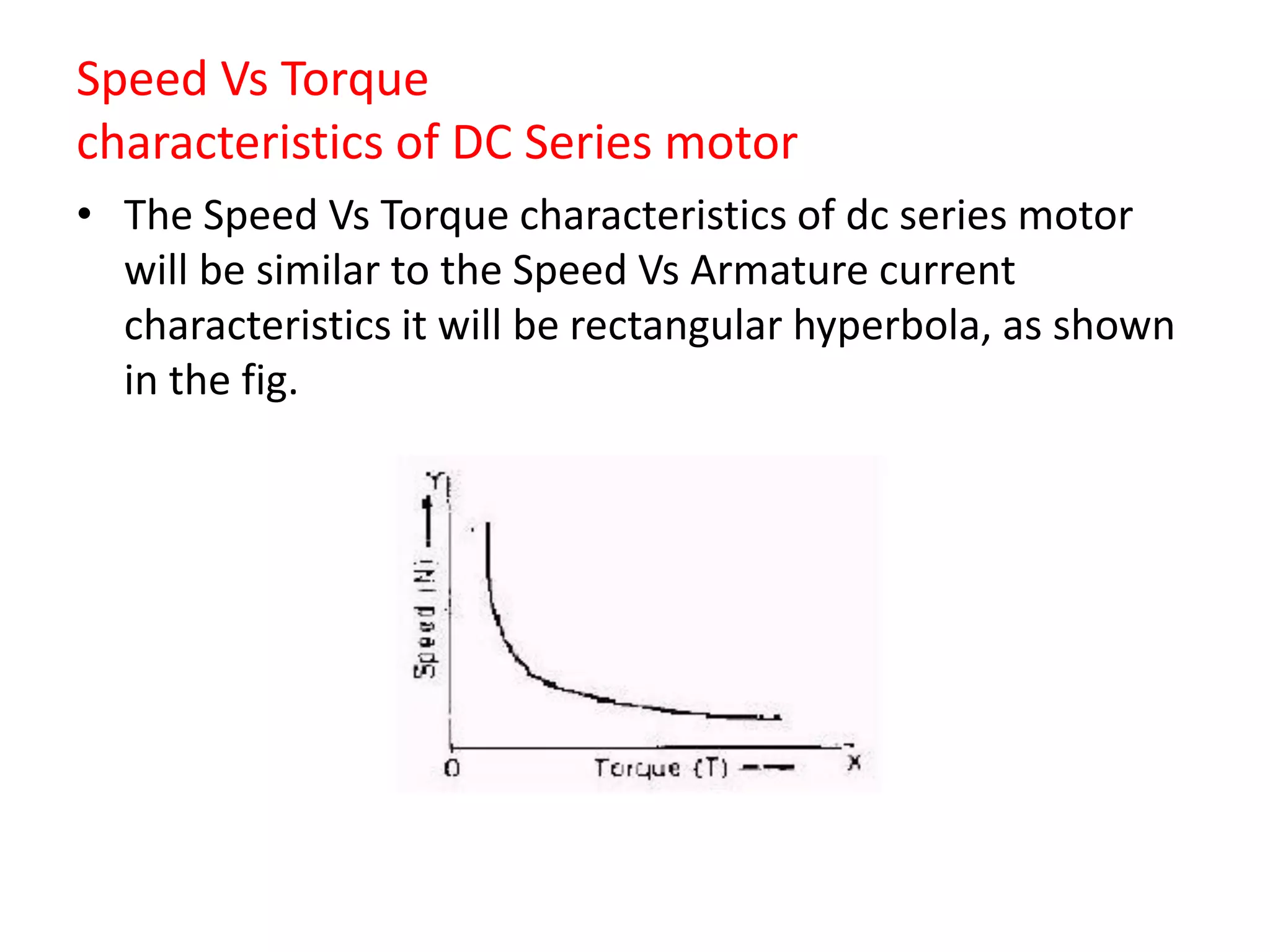
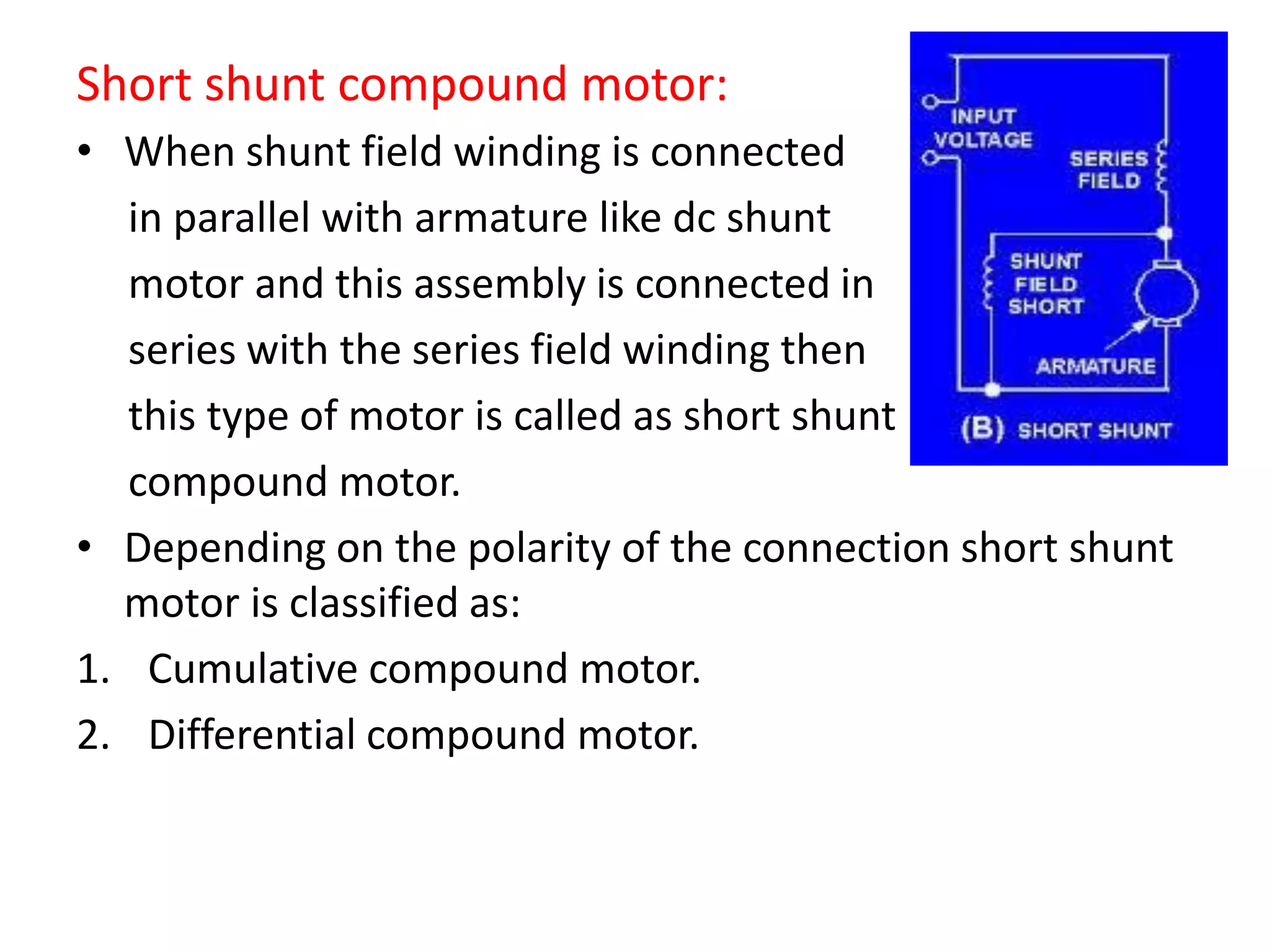
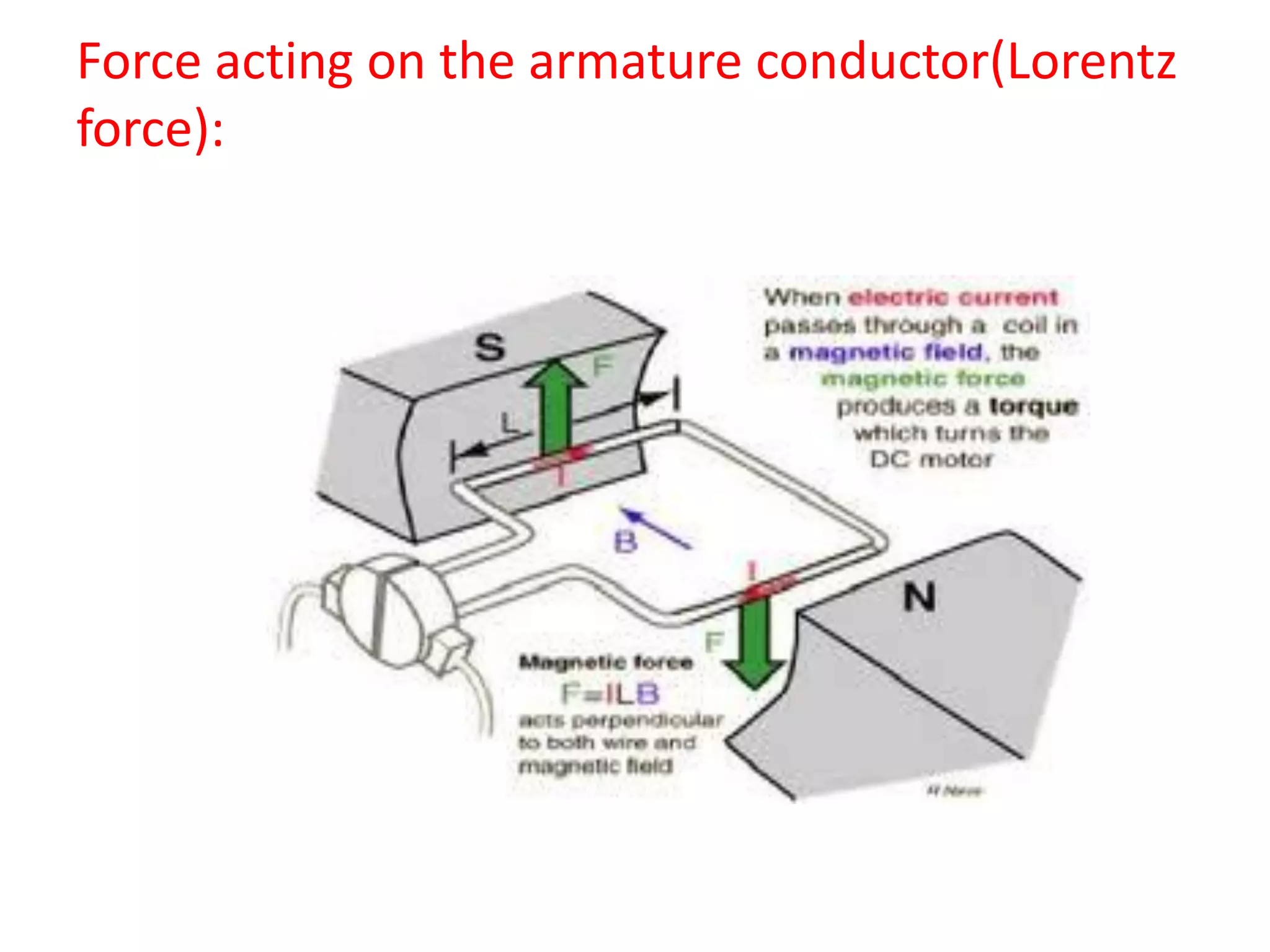

1. A DC motor runs on direct current electricity. It has a field winding that produces a magnetic field when energized, and an armature winding that rotates when placed in this magnetic field. 2. The key parts of a DC motor include the yoke, poles, field winding, armature core, armature winding, commutator, and brushes. The field winding produces flux, and the rotation of the armature winding within this flux induces voltage that is used to power the load. 3. DC motors can be shunt wound, series wound, or compound wound depending on how the field and armature windings are connected. Shunt and series motors have different torque-speed characteristics due





























































































