Downloaded 560 times

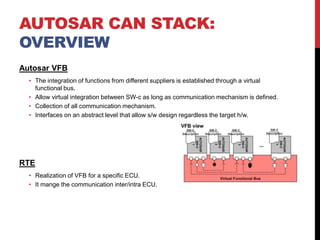
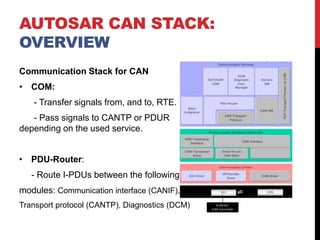
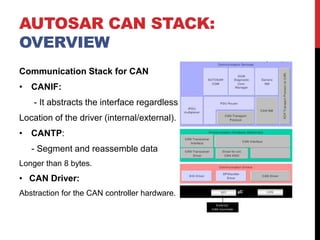
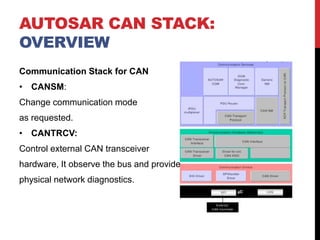




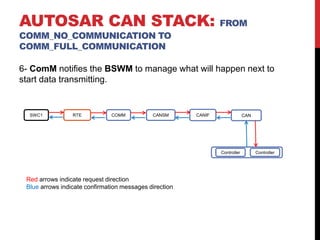
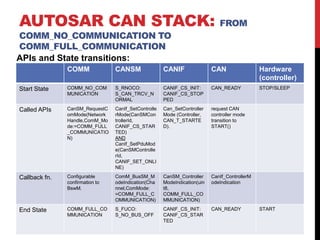
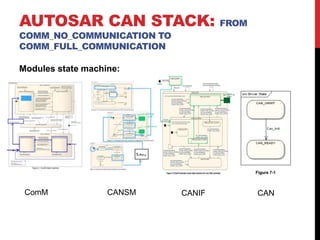
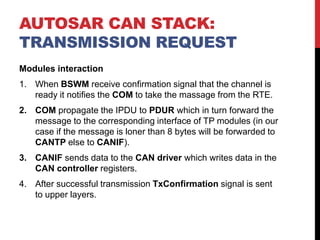
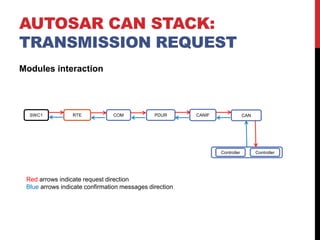

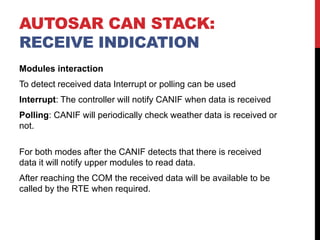
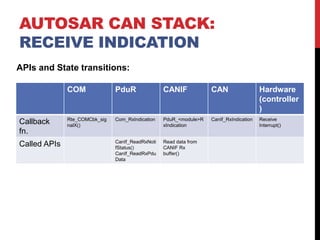

The document provides an overview of the AUTOSAR CAN stack, detailing its communication mechanisms and modules such as RTE, COM, and the transport protocol. It explains the process of transitioning communication modes and outlines the interactions among various components during transmission and reception of data. Additionally, it describes mechanisms for active and passive wake-up, as well as the state transitions and APIs involved in data handling.












































































