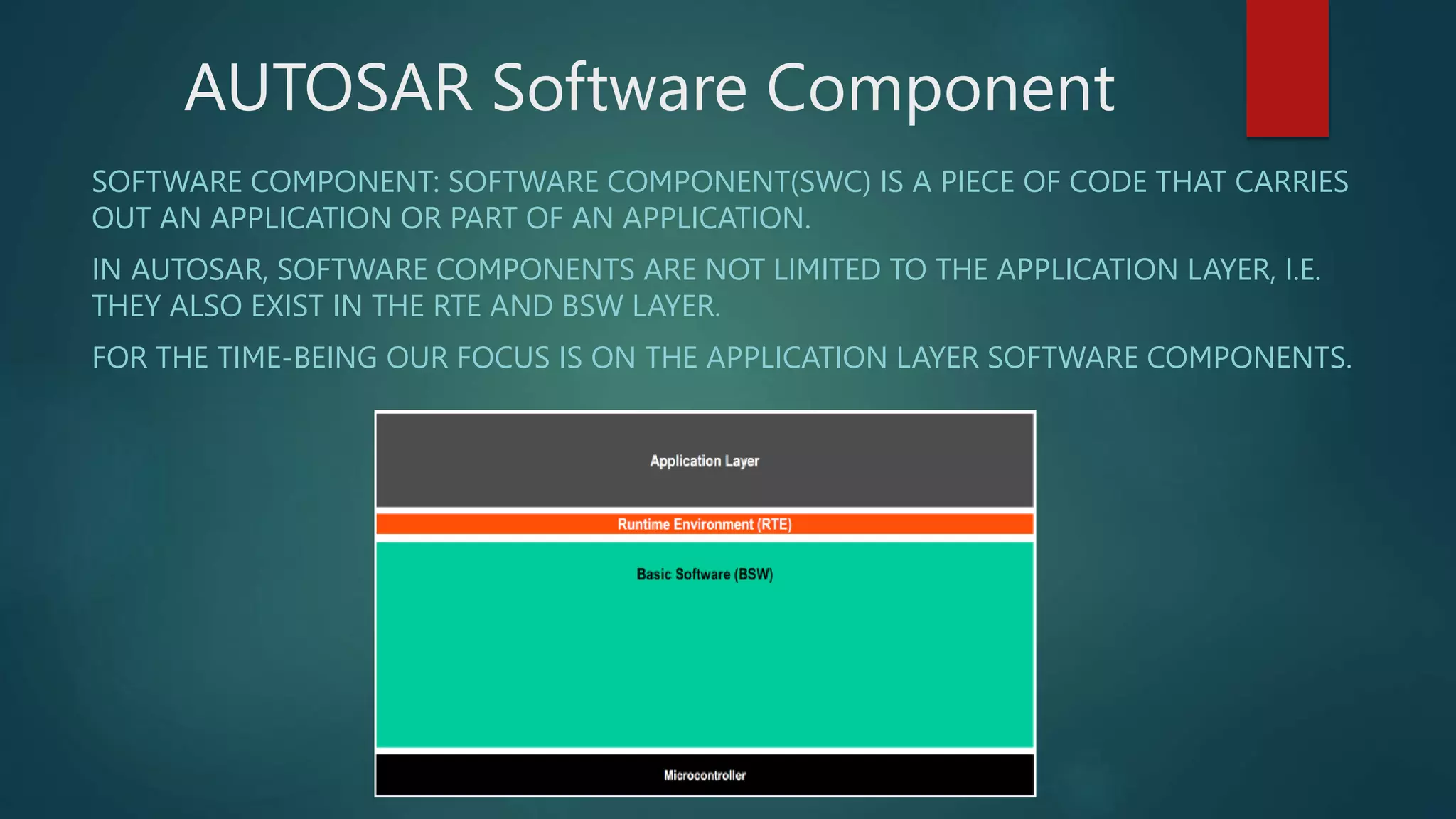
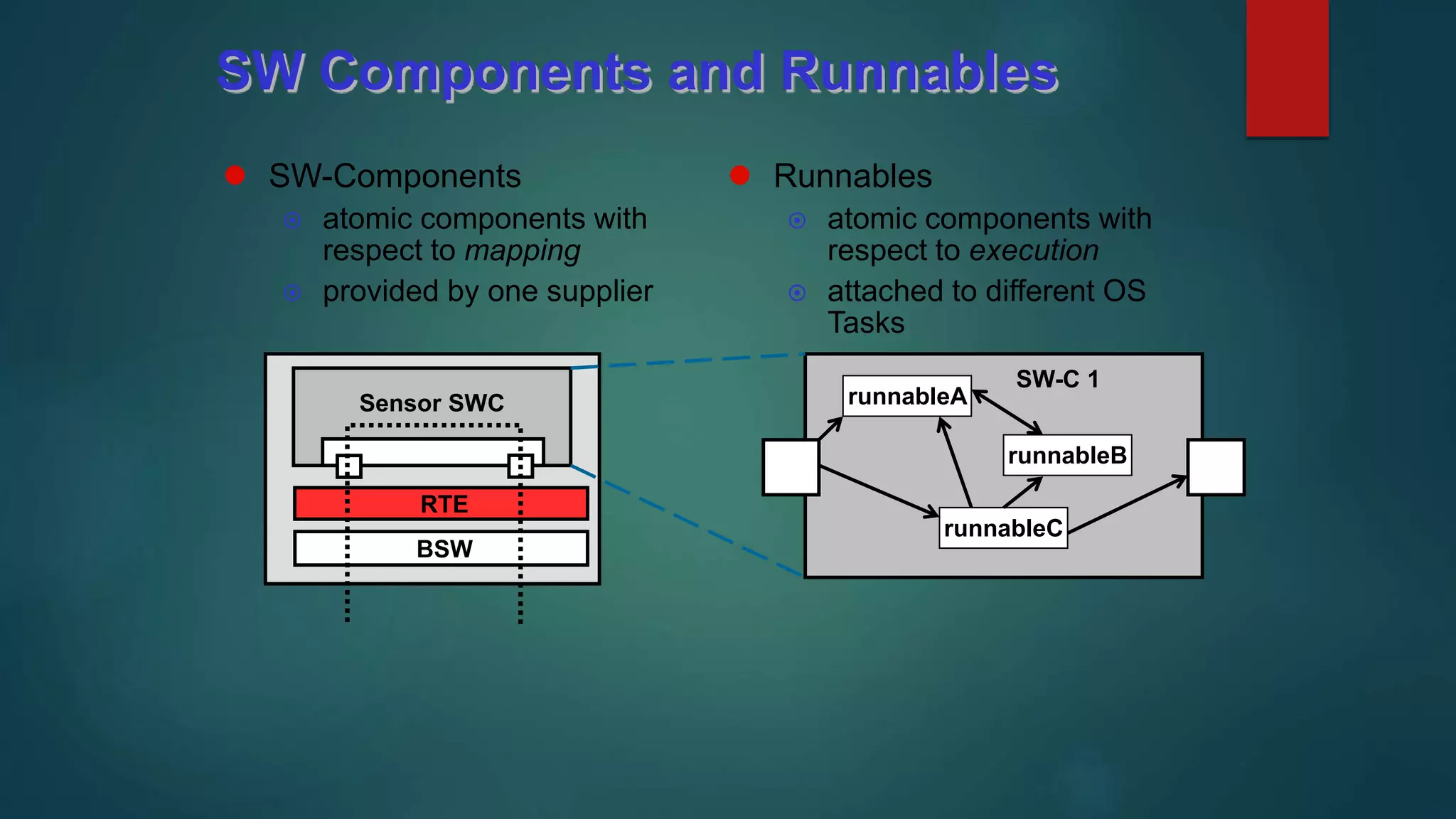
The document discusses AUTOSAR software components (SWCs), which are pieces of code that carry out applications or parts of applications. There are several types of SWCs, including application SWCs, sensor/actuator SWCs, parameter SWCs, and others. SWCs contain elements like ports, internal behavior, and runnables. Runnables are attached to operating system tasks. The document provides examples of how SWCs interact through interfaces like sender-receiver and client-server interfaces. It also discusses how SWCs map to ECUs and contain runnable entities that execute in tasks.