

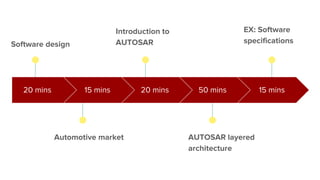





































The document provides an overview of software design concepts in AUTOSAR, including static and dynamic design. For static design, it discusses decomposing software into layers to isolate changes, integrate modules from suppliers, and facilitate reuse. For dynamic design, it focuses on defining system events, tasks, and priorities to guarantee real-time constraints. The document also introduces AUTOSAR, describing its goals of standardization to reduce costs and complexity in automotive software development.



































































