Downloaded 18 times


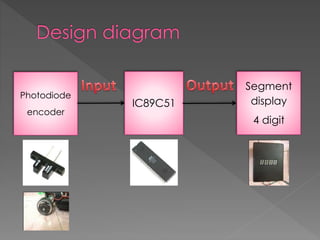


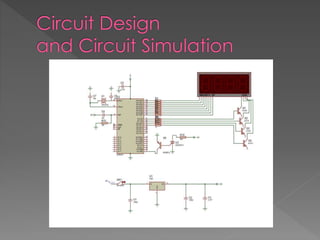




The document describes a project to create a measurement and calculation system for a radio controlled car. A rotary encoder and infrared module attached to the car's wheel act as sensors to measure distance traveled. The microcontroller uses the sensor data and wheel circumference to calculate distance, which is displayed on a 4-digit 7-segment display. The system can measure distance with an error of ±2.5 cm over 100 cm, depending on the surface. It is intended to study measurement, electronics, and for future education.