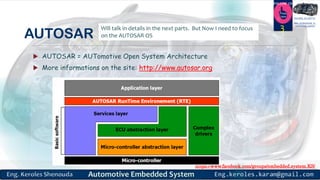
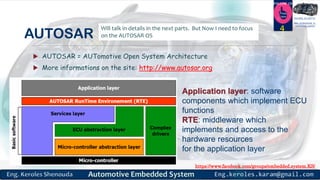
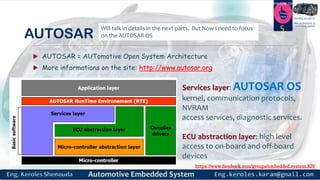
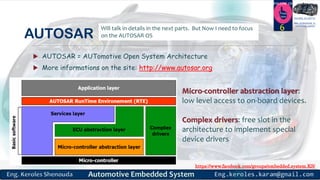
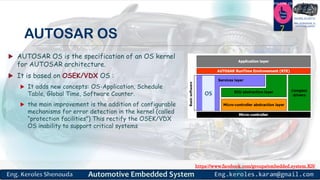
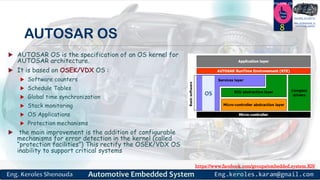
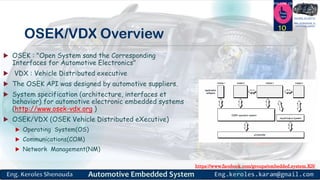
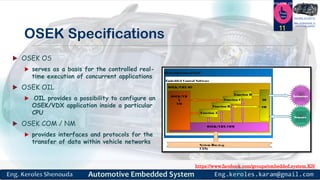
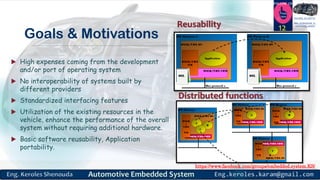
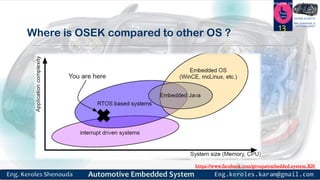
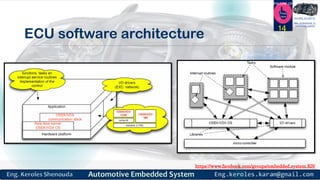
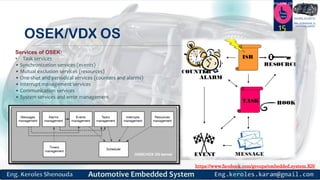
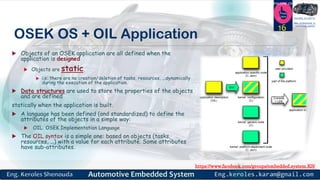
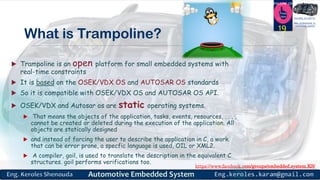
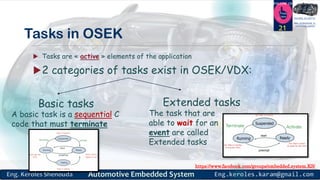
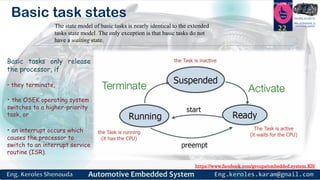
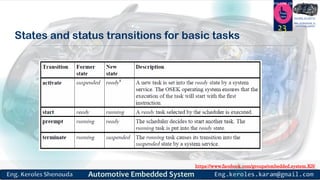
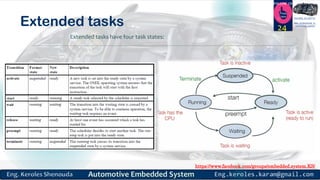
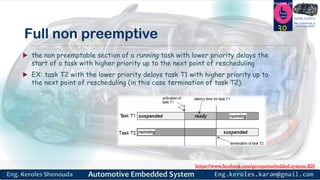
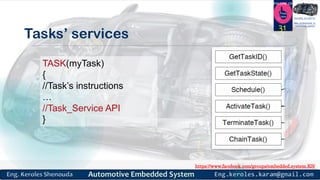
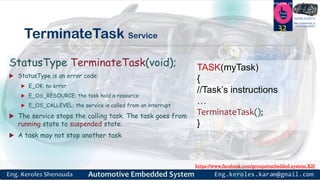
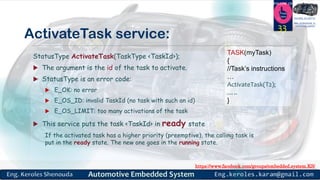
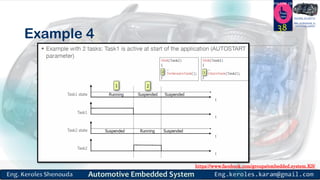
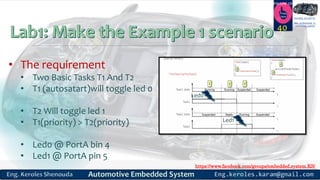
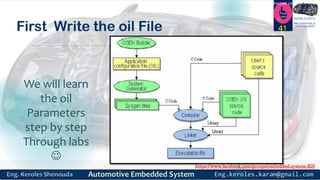
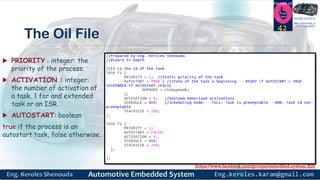
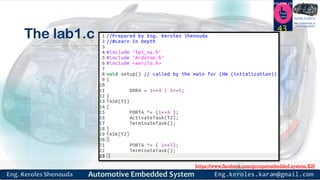
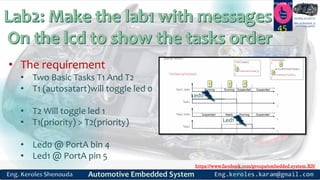
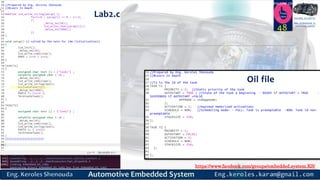
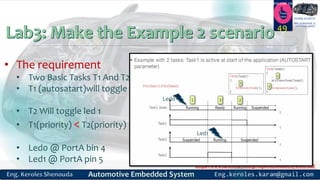
This document discusses embedded operating systems for automotive applications. It provides an overview of OSEK/VDX, an operating system specification for distributed automotive systems. Key topics covered include OSEK/VDX specifications and goals, the AUTOSAR operating system based on OSEK/VDX, task services in OSEK/VDX like TerminateTask and ActivateTask, and examples of task scheduling and chaining in OSEK/VDX. The document aims to teach about real-time operating systems for automotive embedded systems.