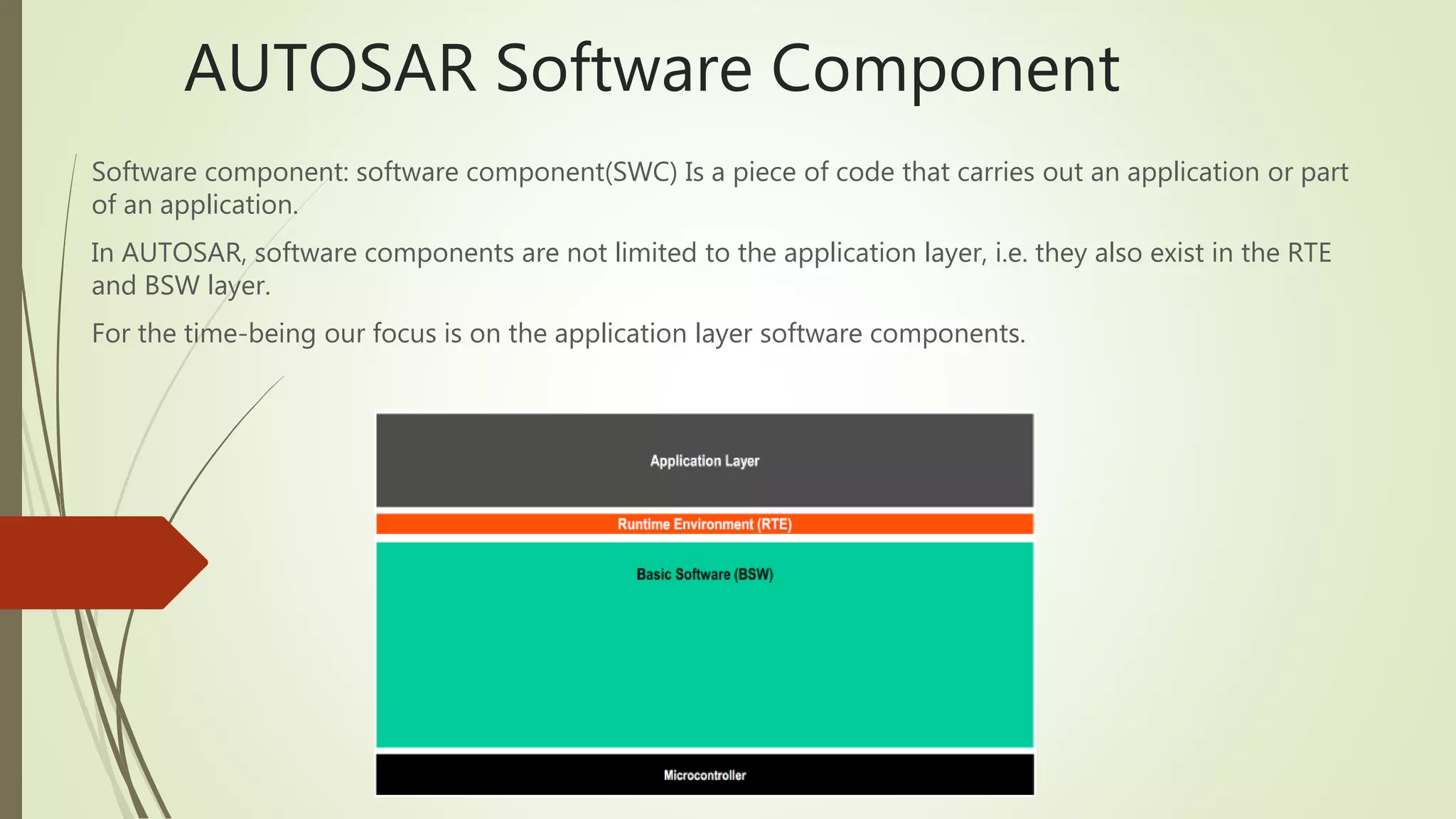
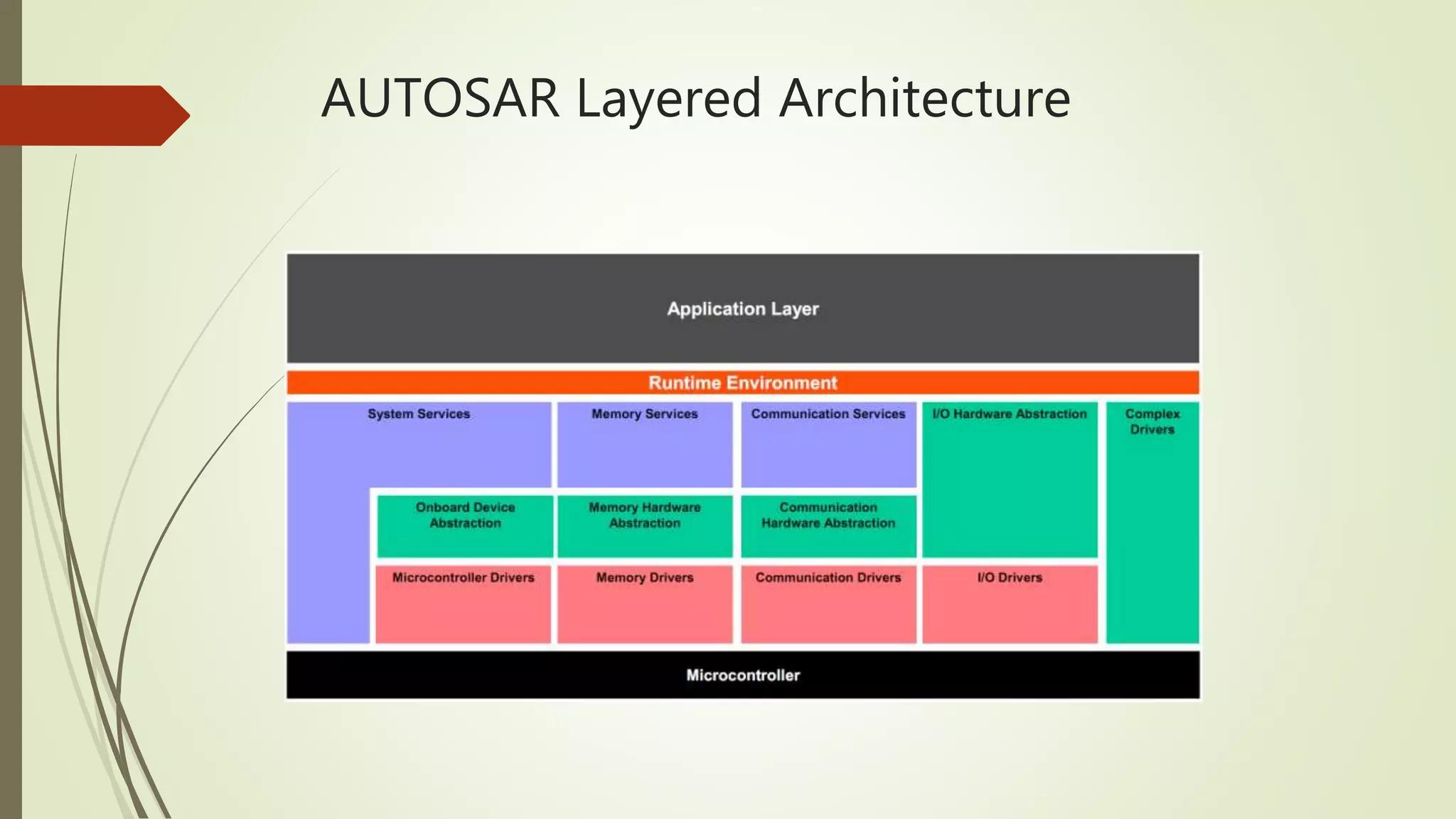
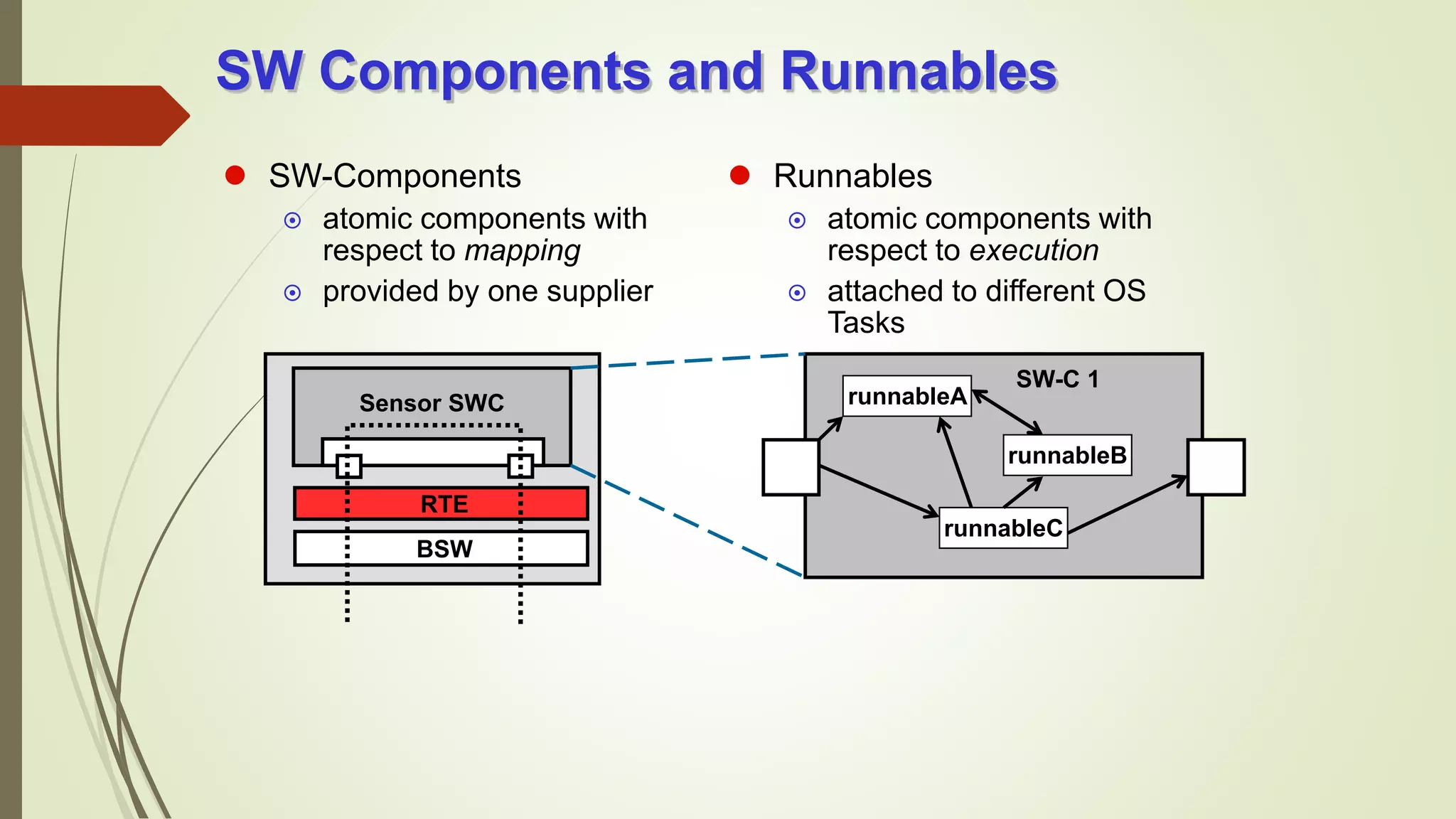
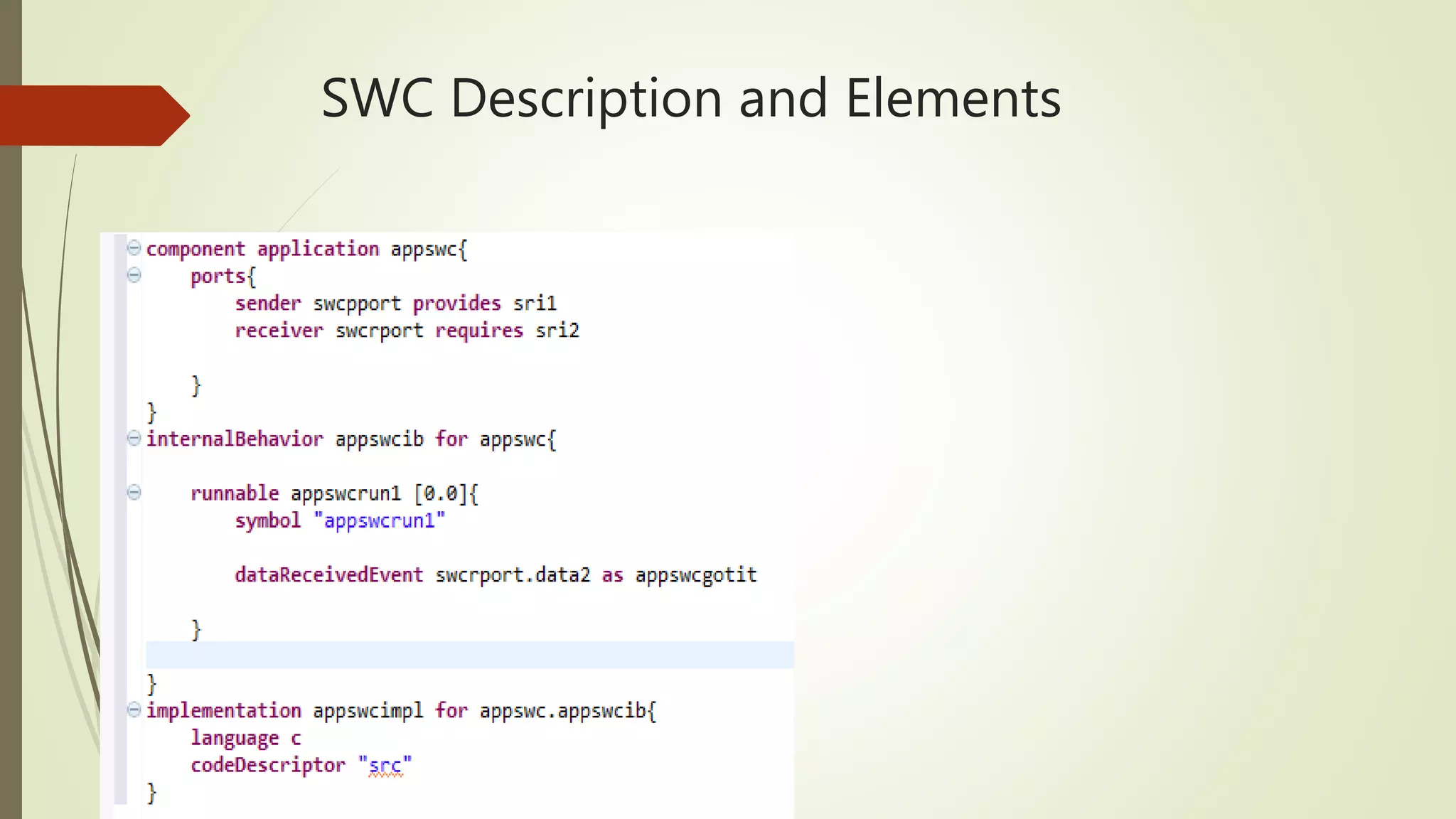
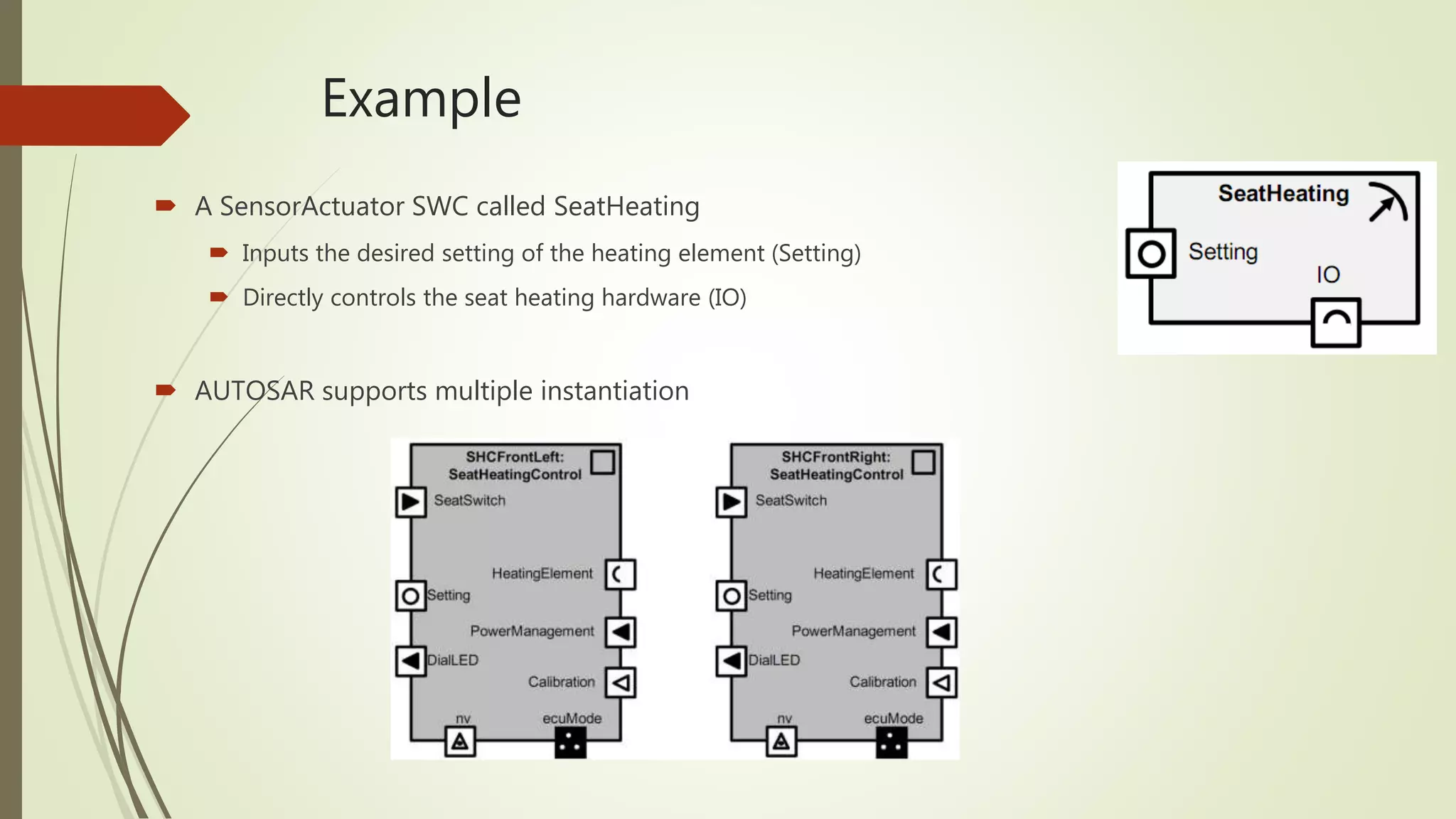
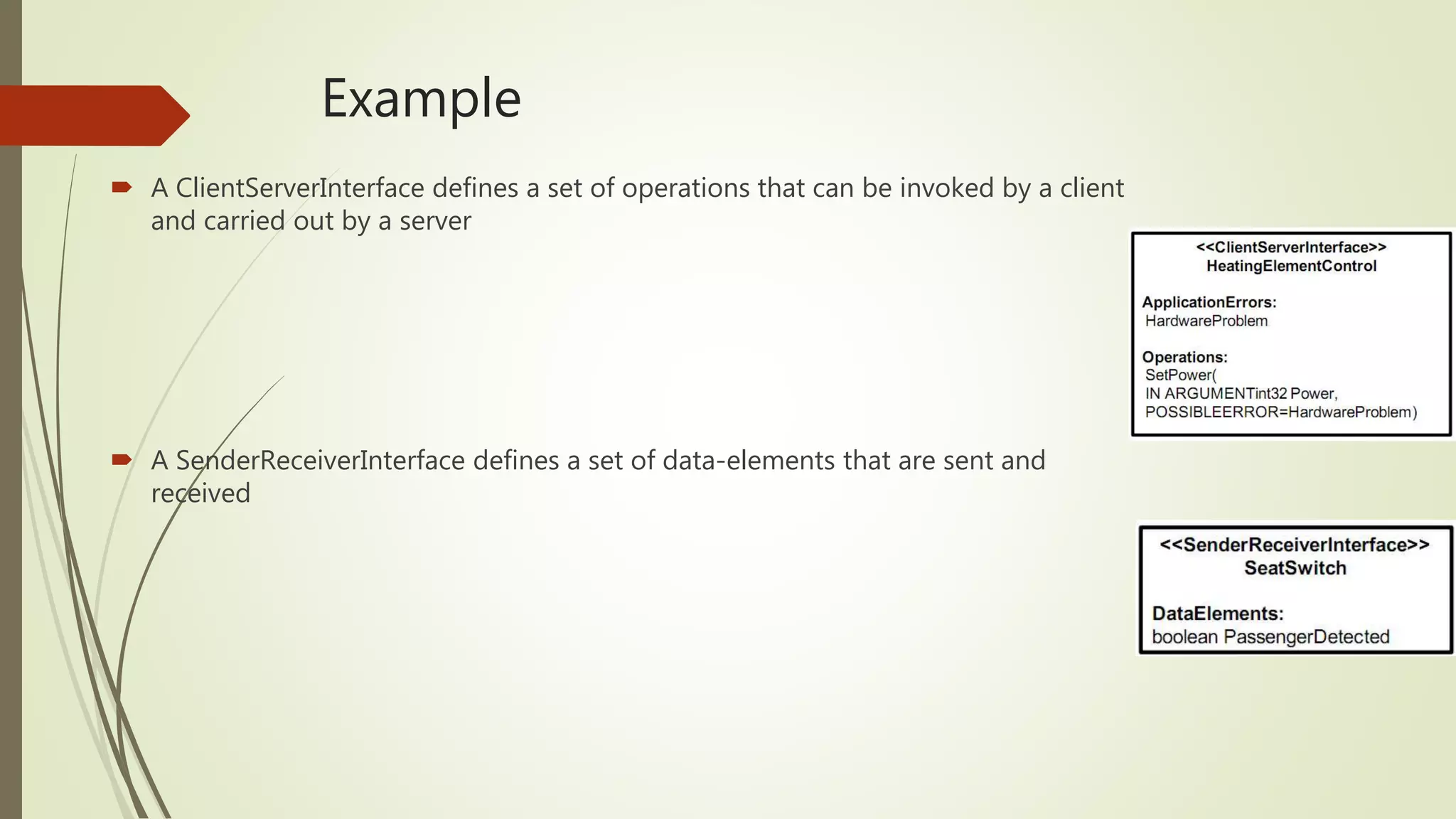
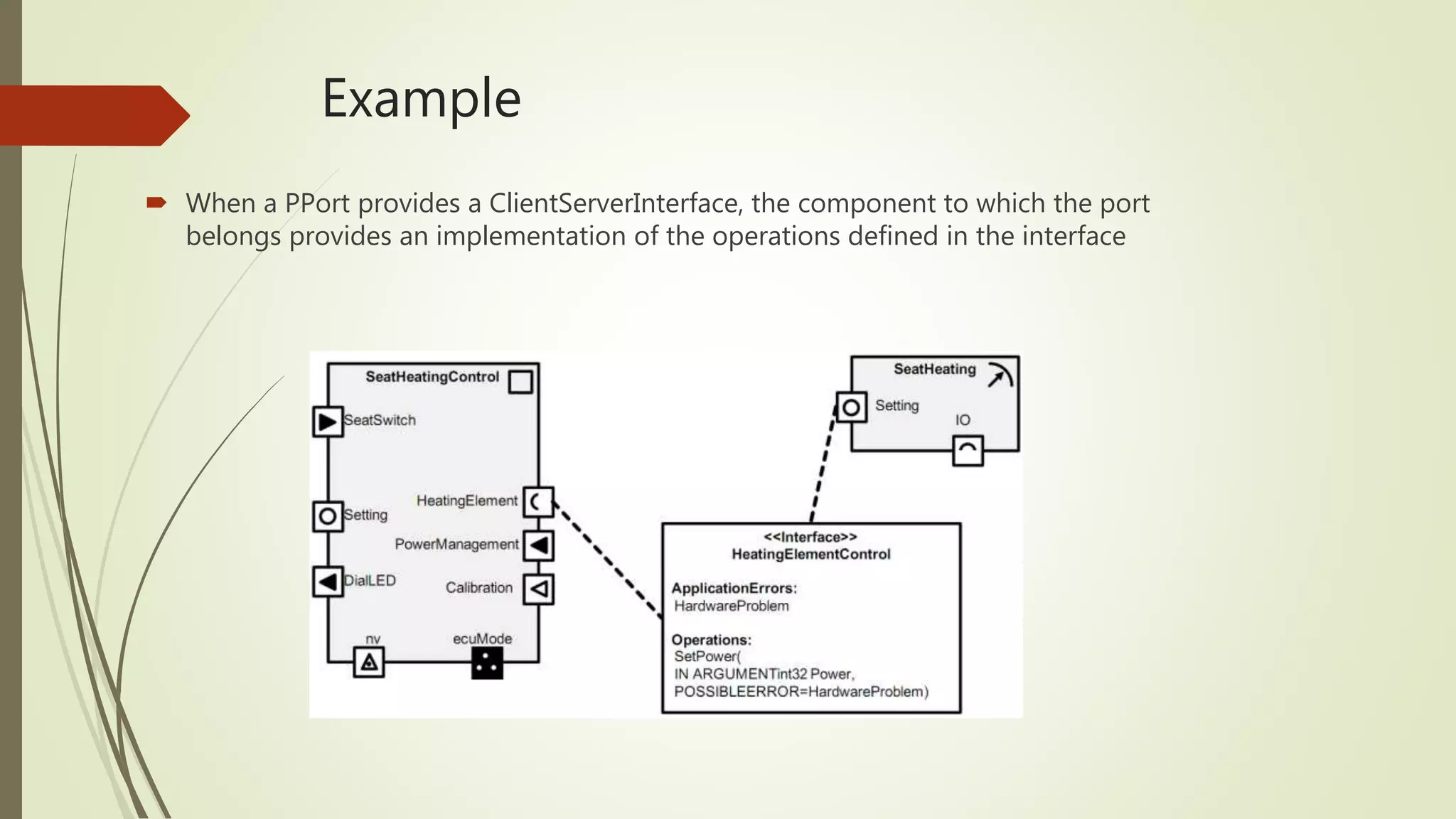
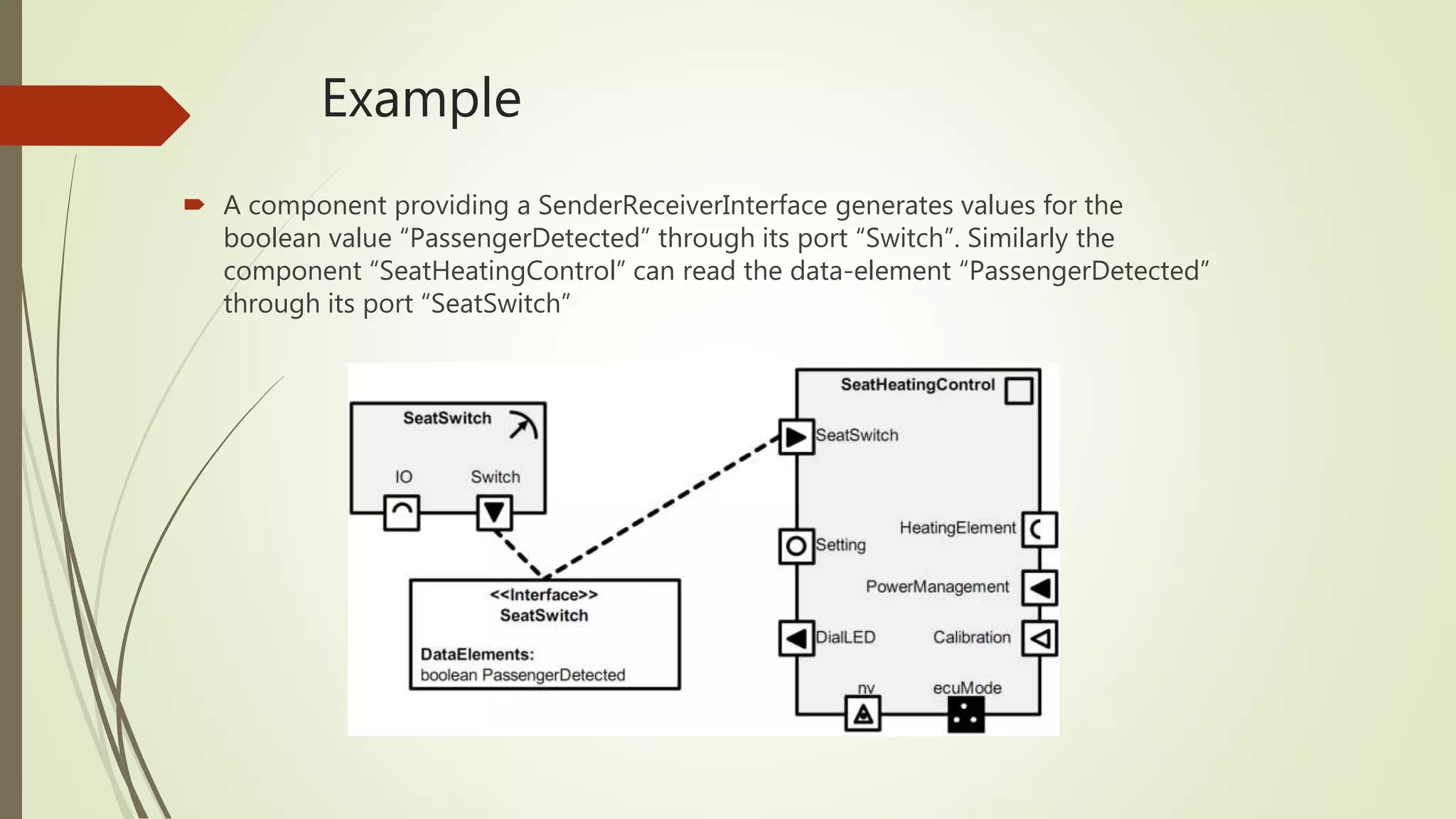
This document provides an overview of software components (SWCs) in AUTOSAR. It defines different types of SWCs including application SWCs, sensoractuator SWCs, parameter SWCs, and others. It describes the purpose and functionality of each SWC type. It also discusses SWC elements like ports, runnables, and implementation.