Downloaded 131 times

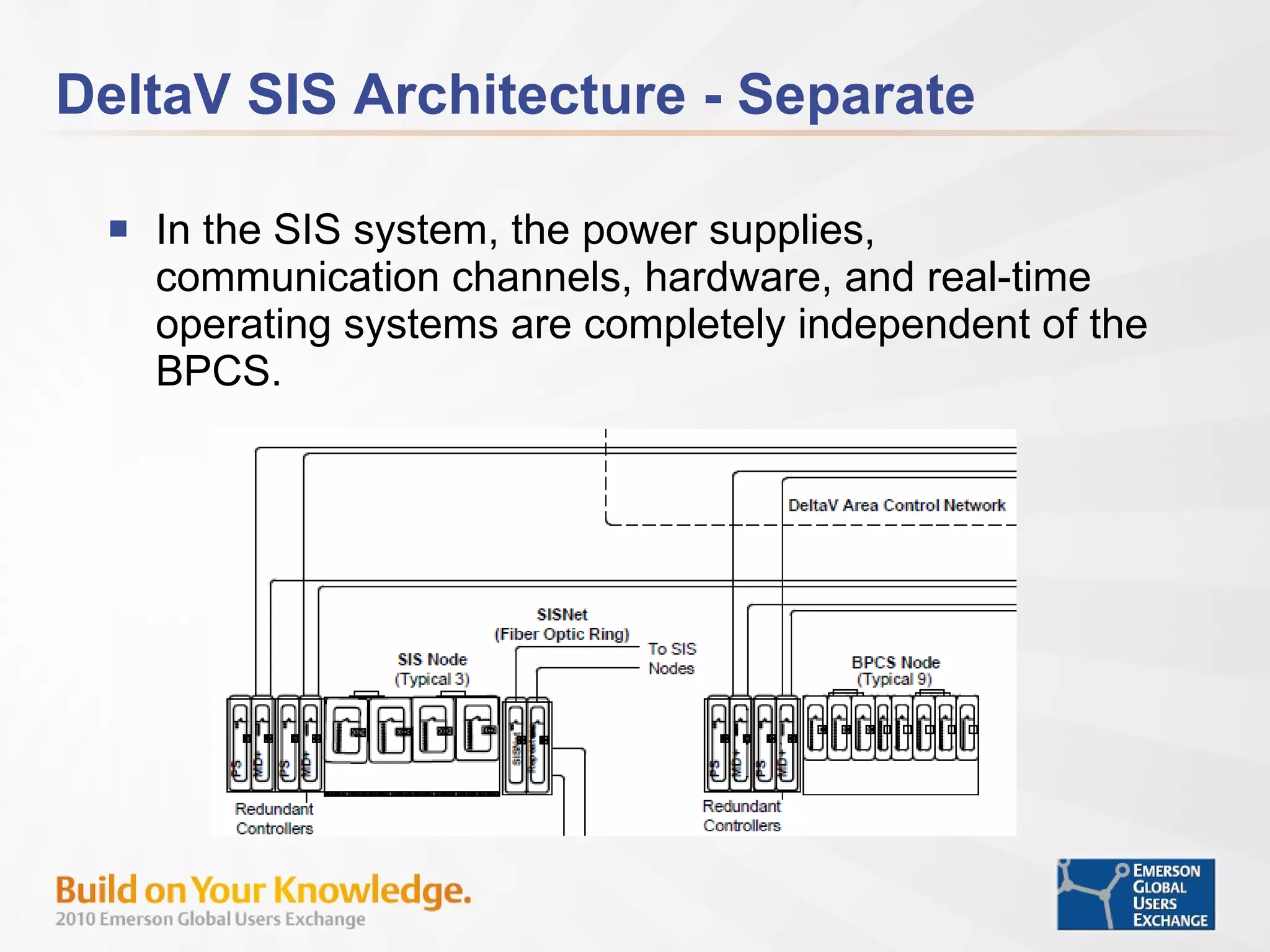
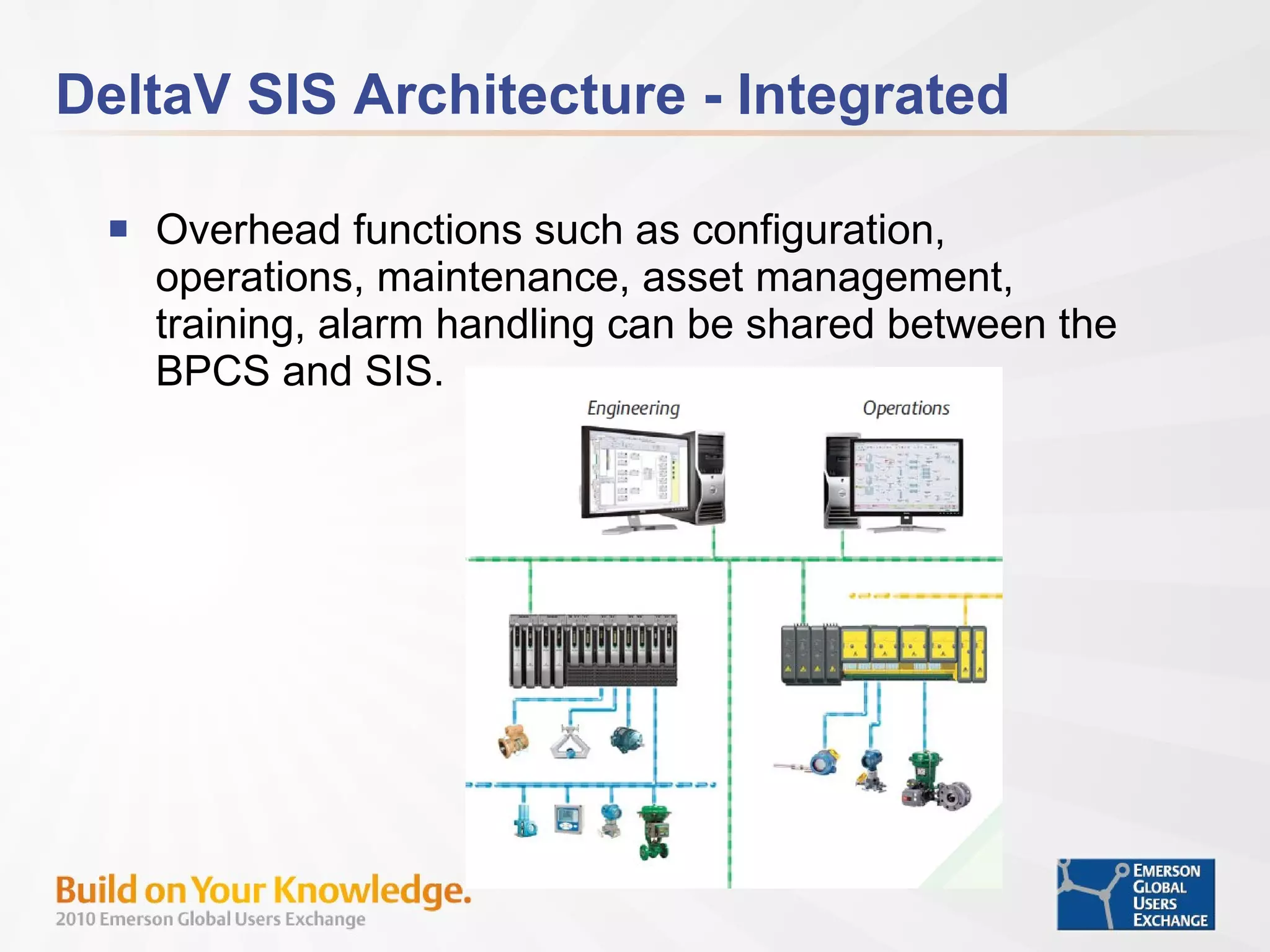
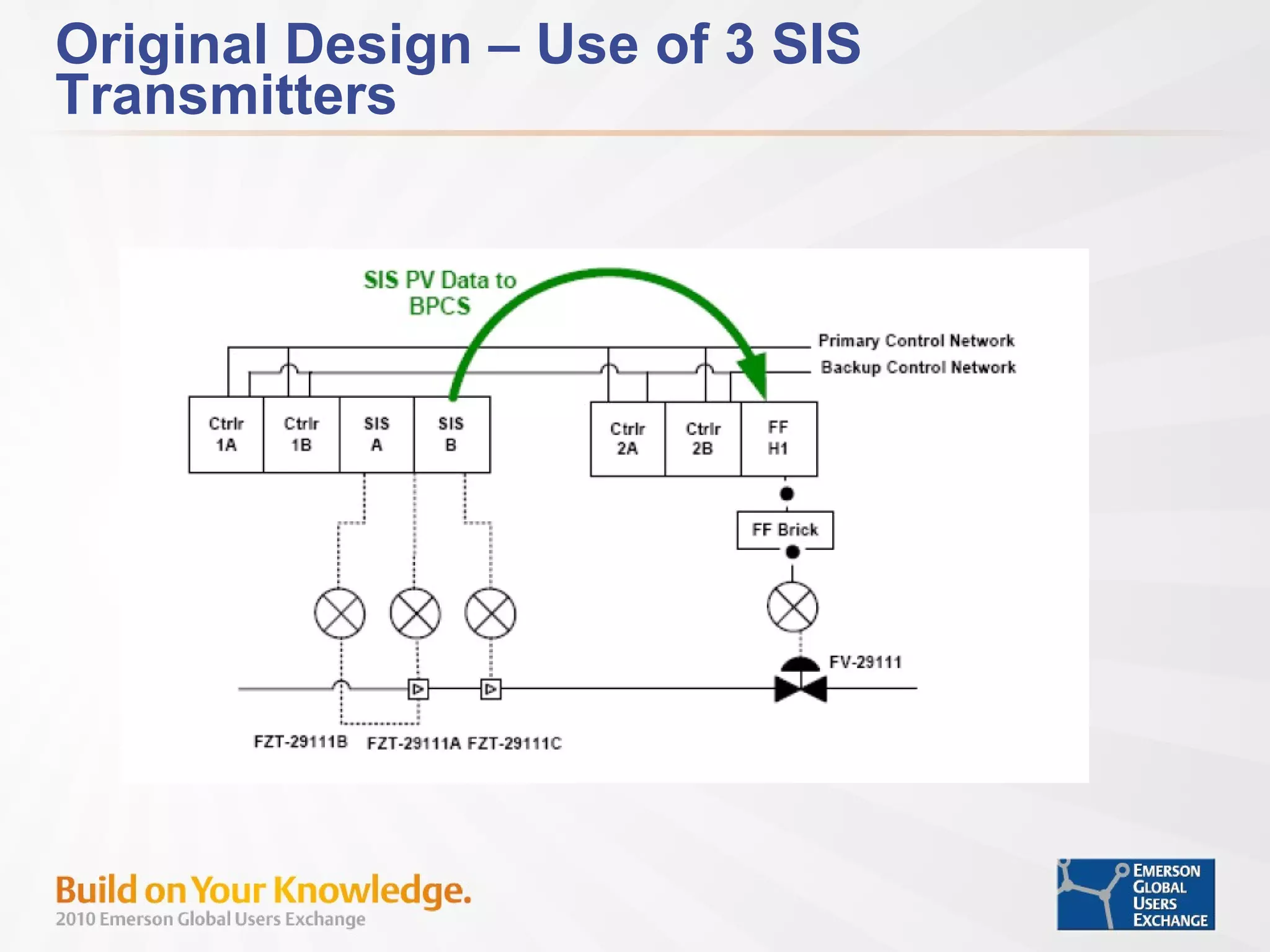
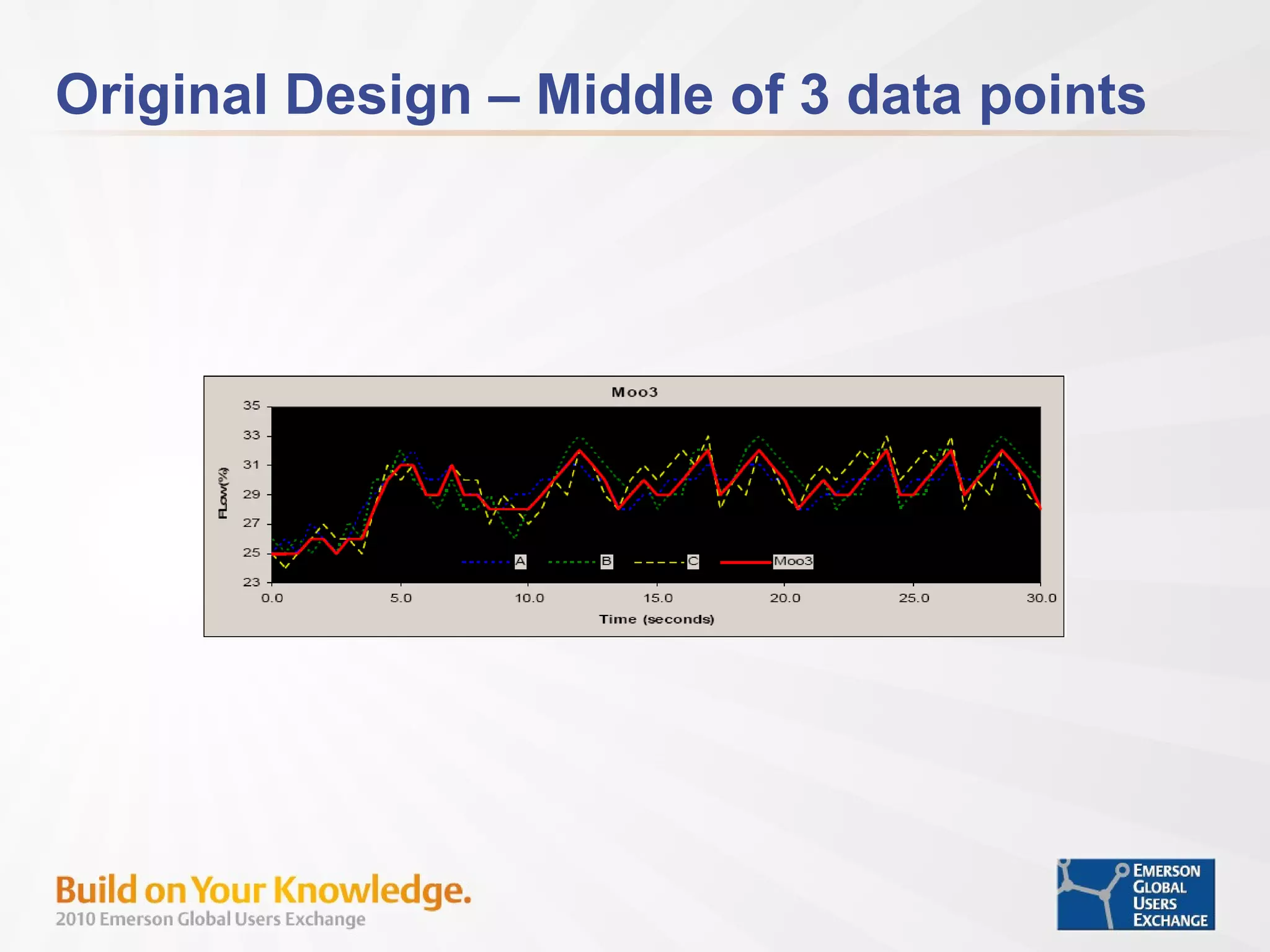
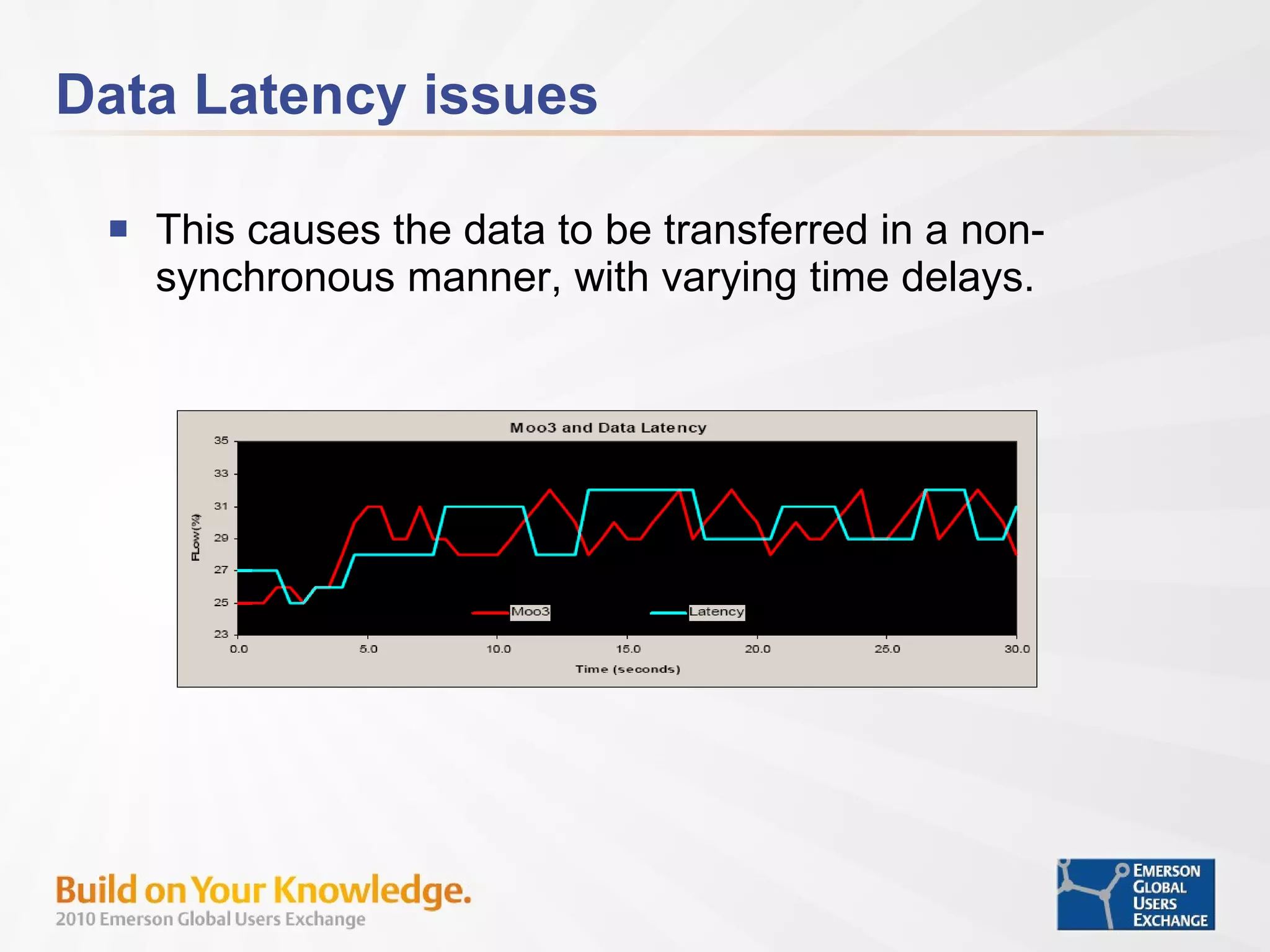
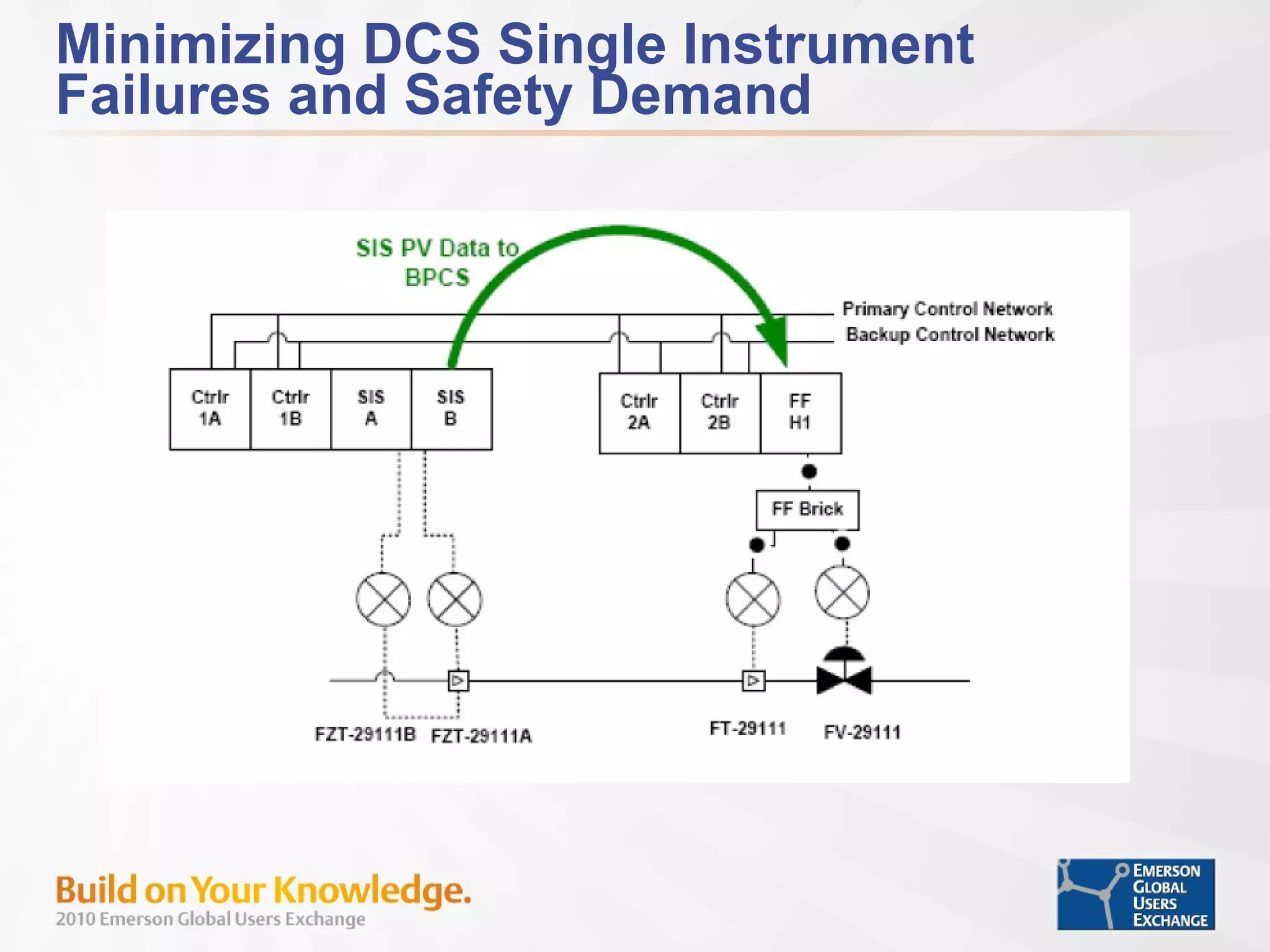
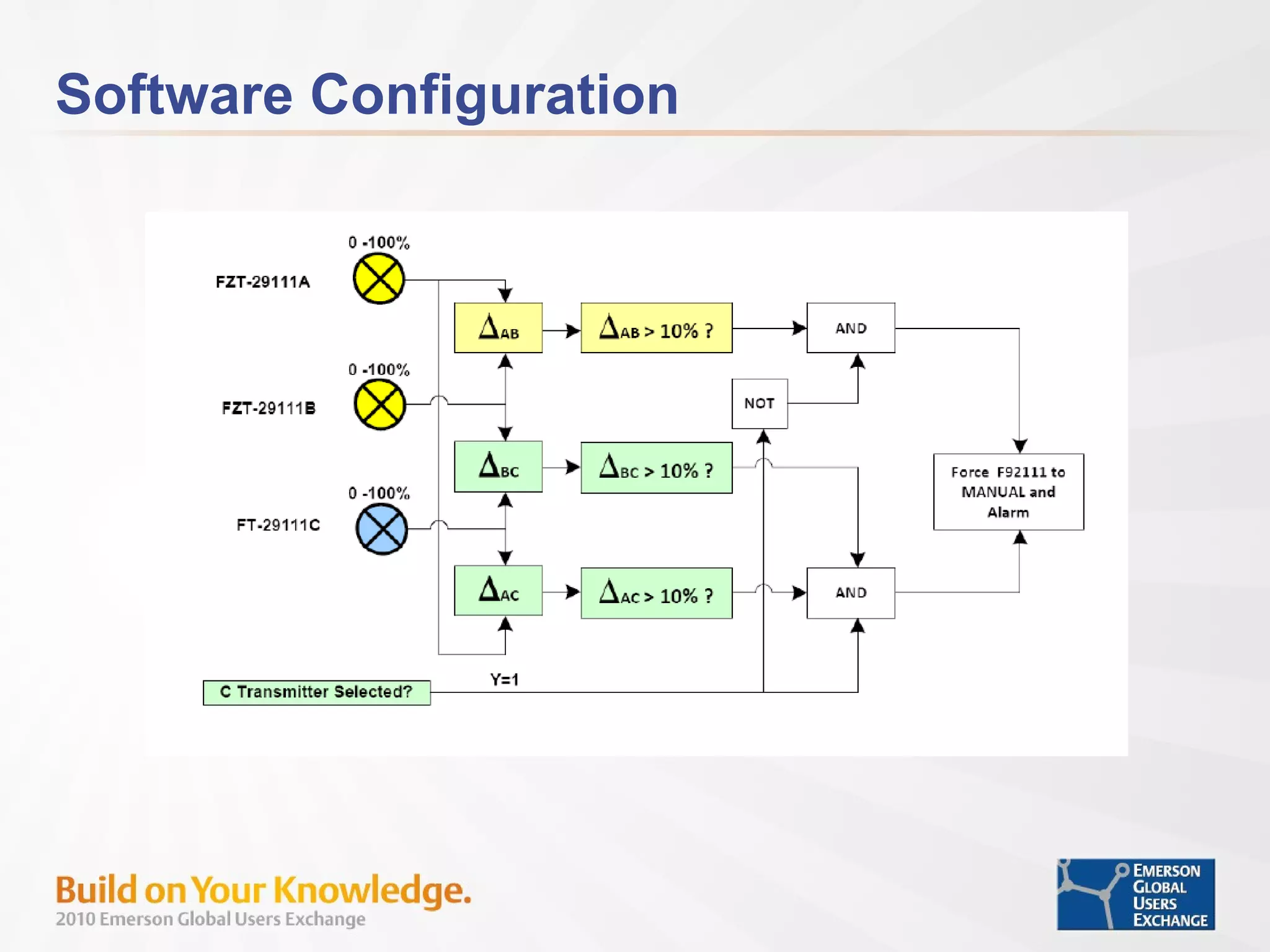
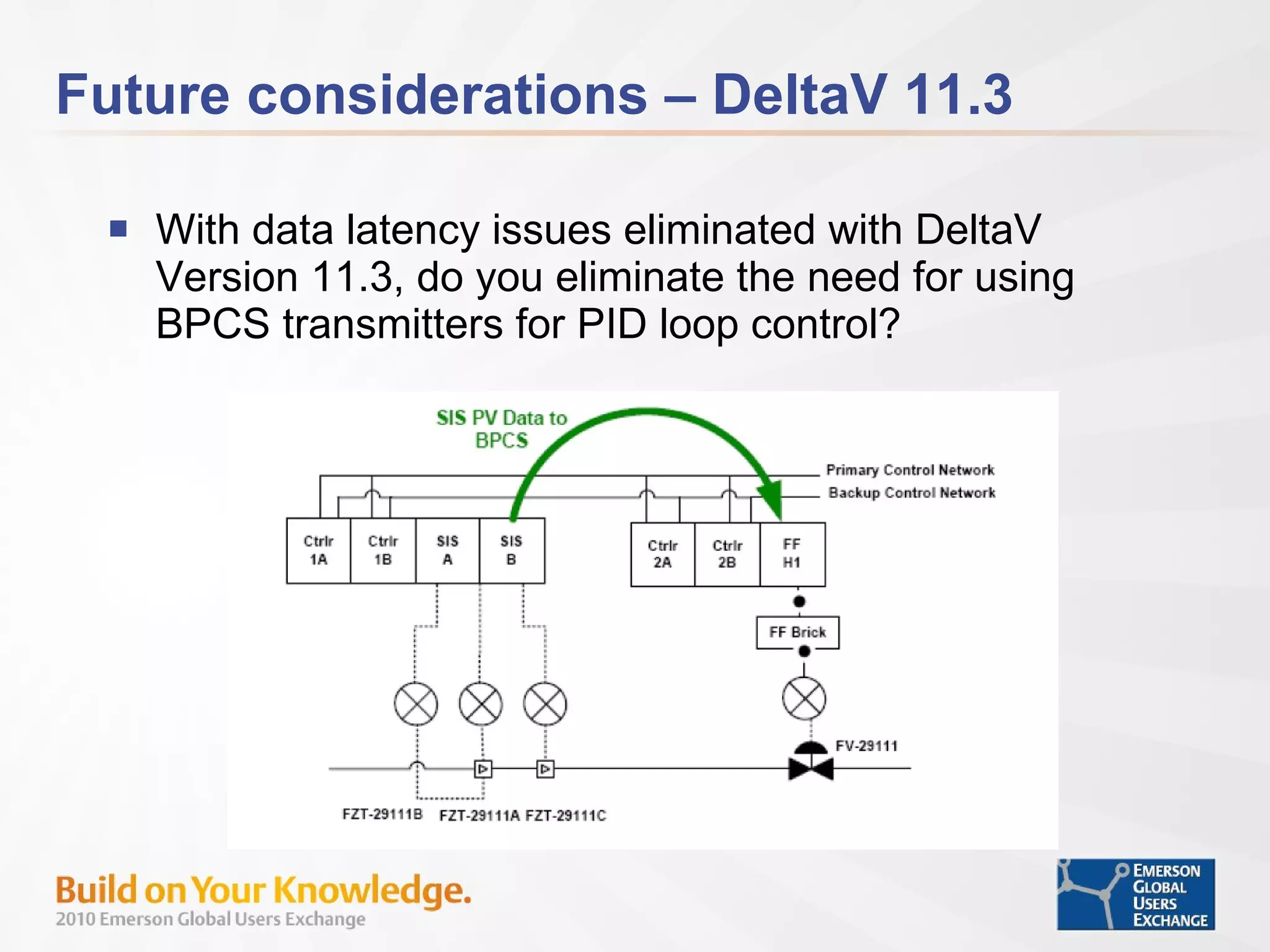

The document discusses using SIS transmitters for both safety and process control purposes on a DeltaV system. It describes how integrating SIS and BPCS architectures allows sharing of configuration, maintenance and operations while keeping the systems separate. The original design used 3 SIS transmitters for voting but caused data latency issues. Alternative designs considered using various combinations of SIS and BPCS transmitters. The selected solution uses 2oo2D voting on SIS transmitters and a dedicated BPCS transmitter, with software configuration to detect deviations and force the BPCS controller to manual mode if needed.























































































