Download as PDF, PPTX
![NOTES AND FORMULAE ADDITIONAL MATHEMATICS FORM 5
1. PROGRESSIONS (iii)
(a) Arithmetic Progression b c c
Tn = a + (n – 1)d
n
a
f ( x )dx f ( x )dx
b
f ( x)dx
a
Sn = [2a ( n 1)d ]
2 (d) Area under a curve
n
= [ a Tn ] AC AB BC
2
(b) Geometric Progression
(b) A, B and C are collinear if
Tn = ar
n–1
n AB BC where is a constant.
Sn
a (1 r )
1 r AB and PQ are parallel if
Sum to infinity
b b
PQ AB where is a constant.
a
S
1 r
A=
a
ydx A=
xdy
a
(c) Subtraction of Two Vectors
(c) General
Tn = Sn − Sn – 1
T1 = a = S1 (e) Volume of Revolution
2. INTEGRATION
x n 1
(a)
xn dx c
n 1 AB OB OA
(ax b) n 1 (d) Vectors in the Cartesian Plane
(b)
( ax b) n dx c
(n 1)a
(c) Rules of Integration:
b b b b
V y 2 dx
V x 2 dy
(i)
nf ( x)dx n f ( x)dx
a a a a
a b
3. VECTORS
(ii)
f ( x)dx f ( x)dx
b a
(a) Triangle Law of Vector Addition OA xi yj
Magnitude of
OA OA x 2 y 2
Prepared by Mr. Sim Kwang Yaw 1](https://image.slidesharecdn.com/form5formulaeandnote-121224040624-phpapp02/85/Form-5-formulae-and-note-1-320.jpg)

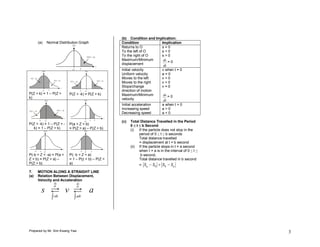

This document provides notes and formulae on additional mathematics for Form 5. It covers topics such as progressions, integration, vectors, trigonometric functions, and probability. For progressions, it defines arithmetic and geometric progressions and gives the formulas for calculating the nth term and sum of terms. For integration, it provides rules and formulas for integrating polynomials, trigonometric functions, and expressions with ax+b. It also defines vectors and their operations including vector addition and subtraction. Other sections cover trigonometric functions, their definitions, relationships and graphs, as well as probability topics such as calculating probabilities of events and distributions like the binomial.