Downloaded 38 times


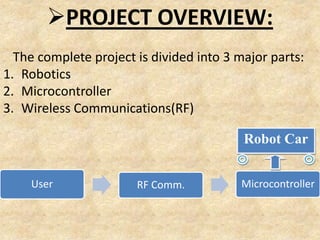
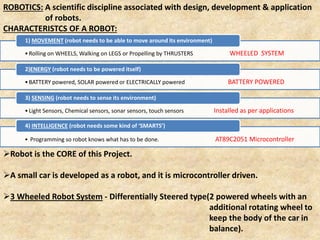
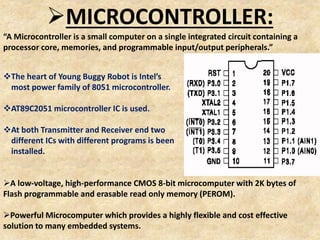
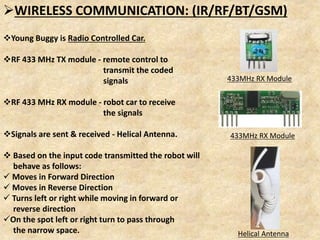
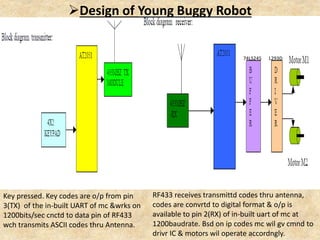
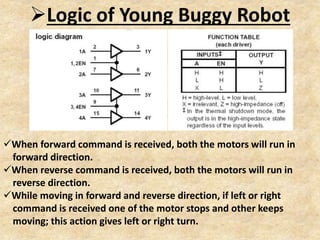
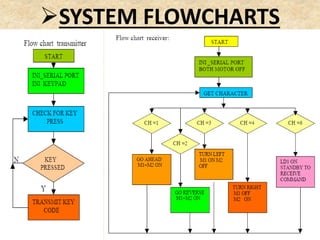

This document describes the design and development of a small, remotely controlled wheeled robot called Young Buggy. The robot uses an AT89C2051 microcontroller and receives remote control commands through a 433MHz RF receiver module. It is intended to perform tasks in environments unsafe or restricted for humans. The robot has wheels for mobility, a battery for power, and can be equipped with sensors as needed for its applications. The document outlines the robot's design, components, control logic, and limitations.