Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
shivsolar
193 views
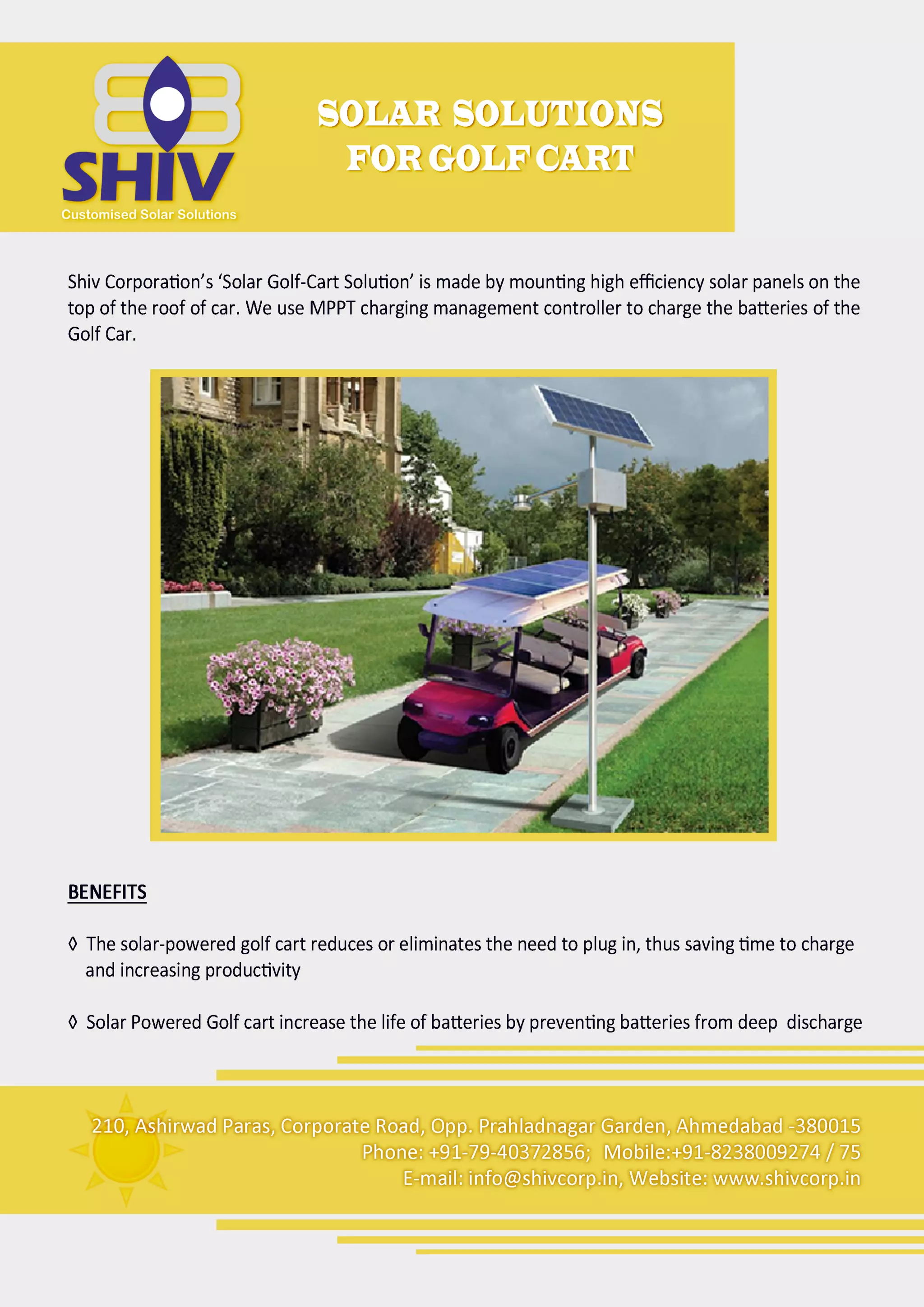
Solar solutions for golf cart
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 2
2
/ 2
More Related Content
PPTX
Presentation on Solar Car
by
Akshay Mistri
PPTX
Solar Car
by
M Kandemir
PDF
poster (1)
by
Arthur Linares
PPSX
Golf buggy presentation
by
tyoung2
PPTX
Young Buggy Robot - Project IETE
by
Gargi Kapadia
PPT
Solar car
by
Skeiene ungdomsskole
PPTX
Solar car .ppt
by
Tengku Hilmi
PPT
Solar energy car.ppt
by
sodhi22517
Presentation on Solar Car
by
Akshay Mistri
Solar Car
by
M Kandemir
poster (1)
by
Arthur Linares
Golf buggy presentation
by
tyoung2
Young Buggy Robot - Project IETE
by
Gargi Kapadia
Solar car
by
Skeiene ungdomsskole
Solar car .ppt
by
Tengku Hilmi
Solar energy car.ppt
by
sodhi22517
More from shivsolar
PPTX
Solar pumps ppt
by
shivsolar
PDF
Solar video surveillance system
by
shivsolar
PDF
Solar tree
by
shivsolar
PDF
Solar street light
by
shivsolar
PDF
Solar fencing
by
shivsolar
PDF
Solar canopy
by
shivsolar
PPTX
Shiv solar presentation
by
shivsolar
Solar pumps ppt
by
shivsolar
Solar video surveillance system
by
shivsolar
Solar tree
by
shivsolar
Solar street light
by
shivsolar
Solar fencing
by
shivsolar
Solar canopy
by
shivsolar
Shiv solar presentation
by
shivsolar
Download