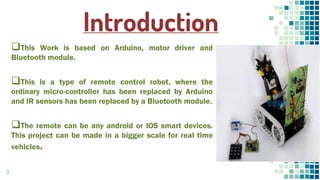
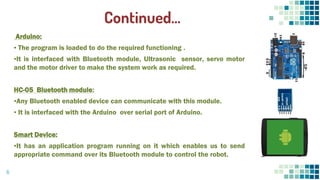
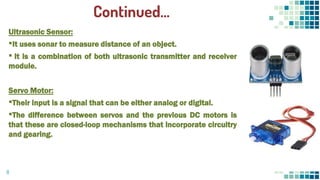
This document describes the design of an Android-based smart carrier robot. The objectives are to develop a robot that can move on command via a smart device application or voice command, avoid obstacles using ultrasonic sensors, and carry objects using a robotic gripper. The hardware includes an Arduino, Bluetooth module, DC motors, motor driver, ultrasonic sensor, and servo motors. An Android application is designed using App Inventor to send movement commands to the robot via Bluetooth. Block diagrams and flowcharts illustrate the system design and workflow. Future extensions could include adding WiFi, more complex movements, and uses like surveillance.