Download to read offline









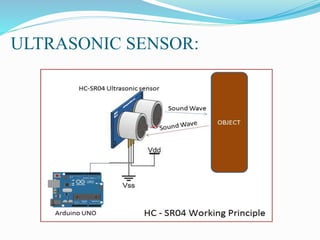









This document describes a wireless robot that can detect motion, transmit live video and audio, and sense temperature. The robot uses an Arduino Uno microcontroller along with a Bluetooth module, motor driver circuit, camera, ultrasonic sensor, and temperature sensor. It is powered by a power supply and can be controlled remotely via Bluetooth to move automatically to hazardous areas while monitoring them. The robot is designed to move in different directions and transmit sensor data to provide remote monitoring capabilities. It has applications in industries, malls, and military and can help save human lives in dangerous situations.