1. The document describes a project to build a motor controller for electric vehicles undertaken by 5 students under the guidance of Sri. H.M. Shivaprasad at BMS College of Engineering.
2. It discusses the need for a motor controller to efficiently control acceleration, speed, and protect the battery from overloads. Literature on previous projects controlling robots through microcontrollers and Android apps is reviewed.
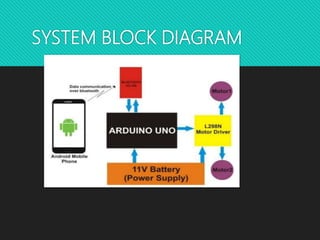
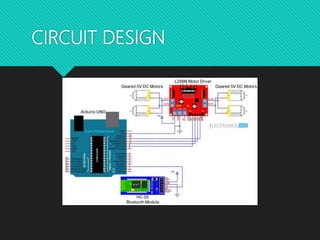
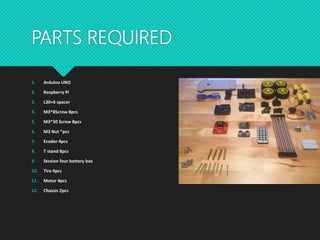
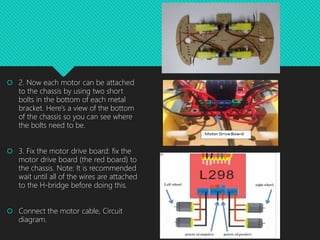
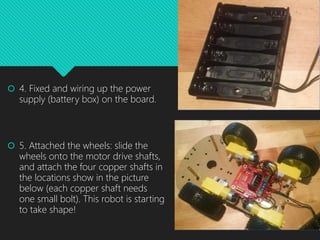
3. The objective is to understand motor controllers for electric vehicles and create wireless Bluetooth control of an RC car using a cell phone. The system design and hardware required are outlined.