Windows Server 2016 で作るシンプルなハイパーコンバージドインフラ (Microsoft TechSummit 2016)
2016年11月に開催された Microsoft TechSummit 2016 での、Windows Server 2016 ストレージ機能 (SDS) を活用したハイパーコンバージドインフラ (HCI) に関するセッションスライドです。
[イベント名] Microsoft TechSummit 2016
[開催日] 2016年11月1日
[セッションID] CDP-002
[セッションタイトル] Windows Server 2016 で作るシンプルなハイパーコンバージドインフラ
自己紹介
前島 鷹賢 @日本マイクロソフト
Day2 18:10-19:00 [CLD009]
お待たせしました! 真の VDI on Azure がついに実現します!
• 宣伝: 二日目最終セッションも担当します
• 役割: IT インフラ系製品技術のプリセールス
• 主な担当製品技術:
✓ Windows Server ✓ Microsoft Azure
✓ System Center ✓ Operations Management Suite (OMS)
3.
本セッションの目的
• ハイパーコンバージドインフラ (HCI)の価値
• HCI を実現する Windows Server 2016 の機能・特徴
▶ 本セッションの中でご理解いただきたいこと
Windows Server 2016 ベースの
HCI および各機能の実機評価・導入
▶ 本セッションの後に実行いただきたいこと
By ArnoldReinhold -Own work, CC BY-SA 3.0
https://commons.wikimedia.org/w/index.php?curid=34872964
By Ing. Richard Hilber (Own work) [Public domain], via
Wikimedia Commons
By Sonic84alpha (Own work) [CC BY-SA 4.0
(http://creativecommons.org/licenses/by-sa/4.0)], via
Wikimedia Commons
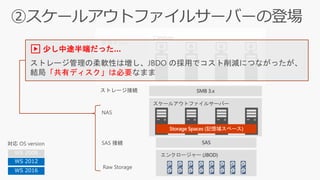
コスト アジリティ 使い勝手 運用容易性↓ ↑ ↑ ↑
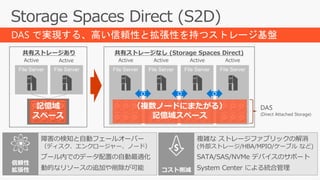
DAS で実現する、高い信頼性と拡張性を持つストレージ基盤
共有ストレージあり
Active Active
共有ストレージなし(Storage Spaces Direct)
Active Active Active Active
信頼性
拡張性
障害の検知と自動フェールオーバー
(ディスク、エンクロージャー、ノード)
プール内でのデータ配置の自動最適化
動的なリソースの追加や削除が可能 コスト削減
複雑な ストレージファブリックの解消
(外部ストレージ/HBA/MPIO/ケーブル など)
SATA/SAS/NVMe デバイスのサポート
System Center による統合管理
(複数ノードにまたがる)
記憶域スペース
記憶域
スペース
DAS
(Direct Attached Storage)
25.
ストレージアクセス
1.
2.
ファイルシステム (CSVFS withReFS)
•
•
•
•
記憶域スペース
•
•
ソフトウェア ストレージバス
•
•
サーバー with ローカルディスク
•
Storage Pool
Storage Space Virtual Disks
Scale-Out File Server
Cluster Shared Volumes C:¥ClusterStorage
Software Storage Bus
Virtual Machines
1 2
SystemCenter
WS 2016 ConvergedWS2012 R2
NIC
RDMA
vmNIC vmNIC
NIC
RDMA
NIC
_
NIC
_
NIC Team
Hyper-V Switch
Live Migration
管理用
Cluster
CSV
41.
WS 2012 R2
NIC
RDMA
vmNICvmNIC
NIC
RDMA
NIC
_
NIC
_
Live Migration
管理用
Cluster
CSV
vmNIC vmNIC
NIC
RDMA
NIC
RDMA
Hyper-V Switch
(SDN)
Embedded Teaming
Live Migration
CSV
管理用 OS
vNIC
管理用 OS
vNIC
RDMA
管理用 OS
vNIC
RDMA
S2D
管理用
Cluster
WS 2016 Converged
42.
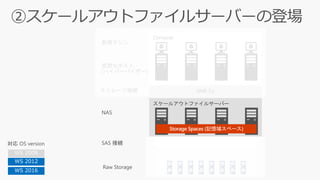
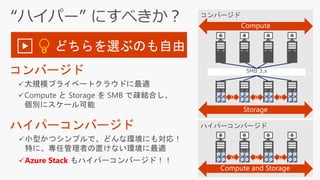
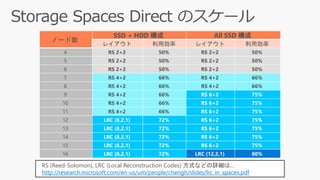
• ストレージクラスターへの通信 (通称North – South)
• [コンバージド] スケールアウトファイルサーバーへの Hyper-V アクセス
• [ハイパーコンバージド] ユーザーによる仮想マシンアクセス
• ストレージクラスター内通信 (通称 East – West)
• ハートビート, Storage Replica, Storage Spaces Direct など
North-South
East - West
✓ 少なくとも 10Gb Ethernet!
✓ RDMA を強く推奨!
(オフロードによる CPU 負荷の軽減にも)
✓ Top of Rack (ToR) スイッチの構成をお忘れなく!
✓ CSV キャッシュを有効化! (East-West 帯域最小化 )
✓ SET による NIC の統合も検討!
East-West > North-South
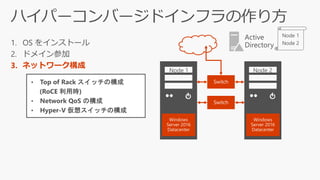
1. OS をインストール
Windows
Server2016
Datacenter
Windows
Server 2016
Datacenter
• Windows Server 2016
Datacenter エディション
• 最小 2 ノード ~
• Windows Update お忘れなく!
46.
1. OS をインストール
2.ドメイン参加
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
47.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
• Top of Rack スイッチの構成
(RoCE 利用時)
• Network QoS の構成
• Hyper-V 仮想スイッチの構成
48.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
49.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成 Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
New-Cluster
–Name <ClusterName>
–Node
<MachineName1,MachineName2>
–NoStorage
50.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
Enable-ClusterStorageSpacesDirect
–CimSession <ClusterName>
51.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
8. ボリューム作成
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
ReFSReFS ReFS ReFS ReFS
52.
1. OS をインストール
2.ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
8. ボリューム作成
9. VM を作成・展開
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
NTFSReFS ReFS ReFS ReFS

![自己紹介
前島 鷹賢 @ 日本マイクロソフト
Day2 18:10-19:00 [CLD009]
お待たせしました! 真の VDI on Azure がついに実現します!
• 宣伝: 二日目最終セッションも担当します
• 役割: IT インフラ系製品技術のプリセールス
• 主な担当製品技術:
✓ Windows Server ✓ Microsoft Azure
✓ System Center ✓ Operations Management Suite (OMS)](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-2-320.jpg)

![By ArnoldReinhold - Own work, CC BY-SA 3.0
https://commons.wikimedia.org/w/index.php?curid=34872964
By Ing. Richard Hilber (Own work) [Public domain], via
Wikimedia Commons
By Sonic84alpha (Own work) [CC BY-SA 4.0
(http://creativecommons.org/licenses/by-sa/4.0)], via
Wikimedia Commons
コスト アジリティ 使い勝手 運用容易性↓ ↑ ↑ ↑](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-5-320.jpg)
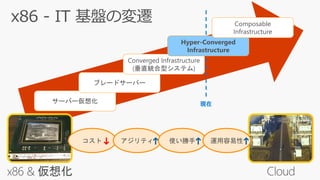





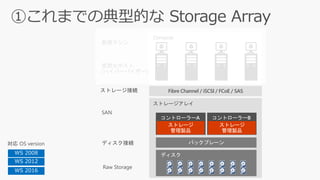
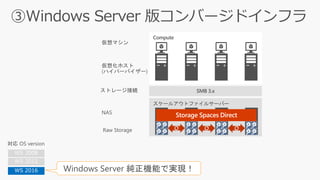
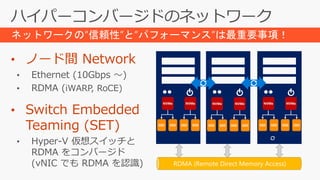
![Azure で培った Software Defined Datacenter 技術を反映
データセンターの
最適化
Software Defined Compute
Software Defined Storage
Software Defined Network
📢 #CLD011
Windows Server 2016 Hyper-V と
Virtual Machine Manager 2016 でここまでできる!
コンパクトで新しいデータセンターへの変革
📢 #CLD019
Azure から生まれた Windows Server 2016 SDN
~アップデート版~
本セッション
[de:code 2016 : INF-017] Windows Server 2016 の Software Defined Storage のしくみと活用
・動画: https://channel9.msdn.com/Events/de-code/2016/INF-017
・資料: https://doc.co/avHo4i
本セッションでご紹介しきれない
その他 の SDS 機能は…](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-14-320.jpg)










![Microsoft Tech Summit
📢 Day2 14:25 - 15:15 [CLD019]
Azure から生まれた Windows Server 2016 SDN ~アップデート版~
SDN の
詳細は…](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-38-320.jpg)

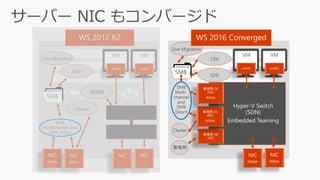
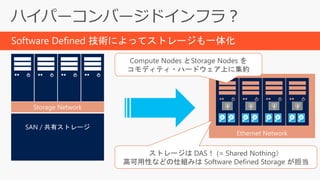
![• ストレージクラスターへの通信 (通称 North – South)
• [コンバージド] スケールアウトファイルサーバーへの Hyper-V アクセス
• [ハイパーコンバージド] ユーザーによる仮想マシンアクセス
• ストレージクラスター内通信 (通称 East – West)
• ハートビート, Storage Replica, Storage Spaces Direct など
North-South
East - West
✓ 少なくとも 10Gb Ethernet!
✓ RDMA を強く推奨!
(オフロードによる CPU 負荷の軽減にも)
✓ Top of Rack (ToR) スイッチの構成をお忘れなく!
✓ CSV キャッシュを有効化! (East-West 帯域最小化 )
✓ SET による NIC の統合も検討!
East-West > North-South](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-42-320.jpg)




![1. OS をインストール
2. ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-48-320.jpg)
![1. OS をインストール
2. ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成 Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
New-Cluster
–Name <ClusterName>
–Node
<MachineName1,MachineName2>
–NoStorage](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-49-320.jpg)
![1. OS をインストール
2. ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
Enable-ClusterStorageSpacesDirect
–CimSession <ClusterName>](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-50-320.jpg)
![1. OS をインストール
2. ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
8. ボリューム作成
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
ReFSReFS ReFS ReFS ReFS](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-51-320.jpg)
![1. OS をインストール
2. ドメイン参加
3. ネットワーク構成
4. 必要な役割と機能を追加
[役割] Hyper-V
[機能] Failover Cluster
5. 再起動
6. クラスターを作成
7. Storage Spaces Direct 有効化
8. ボリューム作成
9. VM を作成・展開
Windows
Server 2016
Datacenter
Windows
Server 2016
Datacenter
Switch
Switch
Failover Cluster
Hyper-V
Failover Cluster
Hyper-V
S2D
NTFSReFS ReFS ReFS ReFS](https://image.slidesharecdn.com/20161101techsummit2016cdp-002hci-180328092554/85/Windows-Server-2016-Microsoft-TechSummit-2016-52-320.jpg)































![[Interact 2018] 別視点からのハイパーコンバージドインフラ ~ ソフトウェアによる華麗な “ものづくり“ の世界](https://cdn.slidesharecdn.com/ss_thumbnails/interact2018ogawad-180703223547-thumbnail.jpg?width=640&height=640&fit=bounds)




![[Japan Tech summit 2017] CLD 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld009-171115032113-thumbnail.jpg?width=640&height=640&fit=bounds)








![[Japan Tech summit 2017] CLD 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld011-171115032116-thumbnail.jpg?width=640&height=640&fit=bounds)


















