Downloaded 36 times

![2.1 Studying the Use of Fuzzy Inference Systems for
Motor Imagery Classification [1]
- Brain-Computer Interfaces with CFIS.
(Chiu's Fuzzy Inference System)
- 3 steps processing
(1) Clustering of training data - Subtractive clustering
algorithm.
(2) Generation of the fuzzy rules - Gaussian
membership function.
(3) Fuzzy rule optimization - Gradient Descent
Formulas](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-5-2048.jpg)
![- Detection - Bipolar Electrodes
- Feature Extraction - beta and alpha bands (C3β, C3α, C4β, C4α)
- Hand-Made Fuzzy Rules (HMFR)
- Classifier Comparison - Support Vector Machine (SVM),
Multi-Layer Perceptron (MLP),
Linear Classifier (LC)
Table 1 Accuracy(%) and Mutual Information (MI) of Classifiers [1]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-6-2048.jpg)
![Table 2 Fuzzy rules automatically extracted by CFIS for subject [1]
Table 3 Hand-made fuzzy rules used to classify motor imagery data [1]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-7-2048.jpg)
![2. System of Communication and Control Based on the Thought [2]
- Accuracy in classify 70%
- Autoregressive Adaptive Parameter Feature Extraction
- Neural Network Classifier
-
Movement patterns of left and right hand](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-8-2048.jpg)
![Figure 1 System workflow [2]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-9-2048.jpg)
![3. BioSig: The Free and Open Source Software Library for
Biomedical Signal Processing [3]
- Open source application for Biomedical Signal
Processing.
- Used in research of Neuroinformatics,
Brain-Computer Interfaces, Neurophysiology,
Psychology, Cardiovascular Systems and
Sleep Research.](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-10-2048.jpg)
![Figure 2 Architecture of the BioSig toolbox and its elements [3]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-12-2048.jpg)
![Figure 4 Elements of a brain computer interface [3]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-13-2048.jpg)
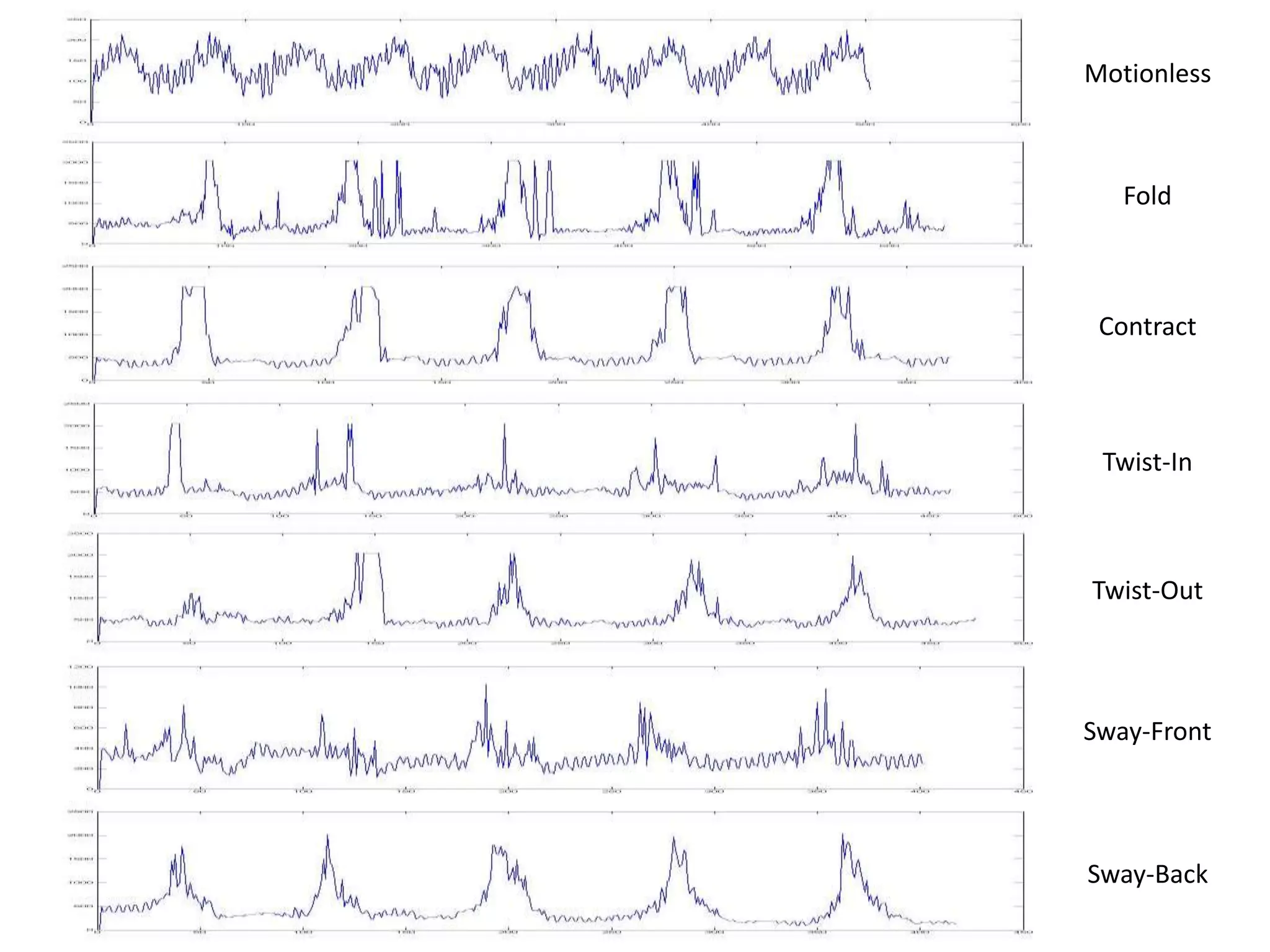
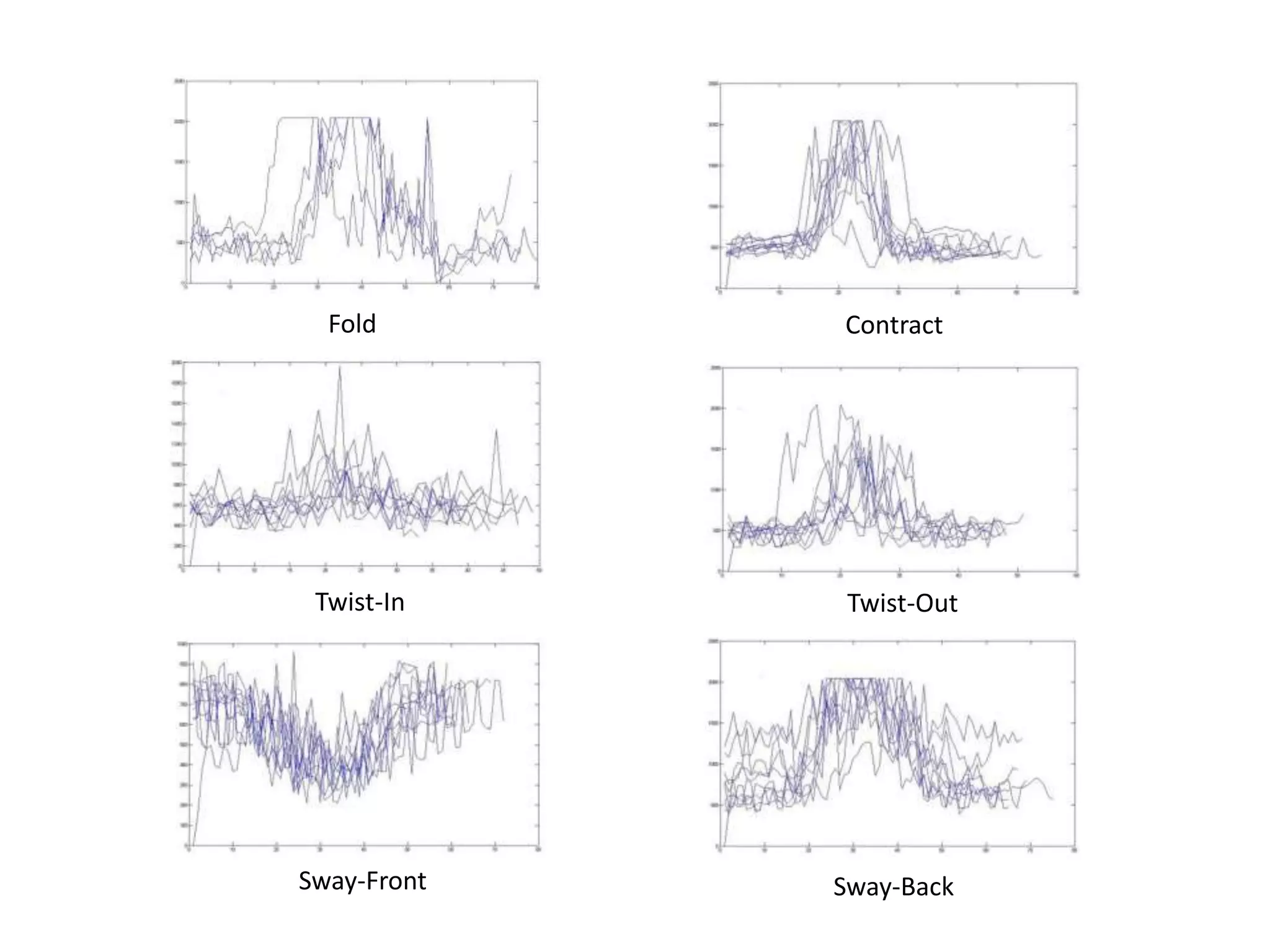
![4. Forearm EMG Pattern Recognition for Multifunction
Myoelectric Control System [4]
Figure 5 Multifunction myoelectric control system [4]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-14-2048.jpg)
![Figure 6 EMG signals from muscle movement, posture and hand gestures. [4]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-15-2048.jpg)
![Figure 7 Processing [4]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-16-2048.jpg)
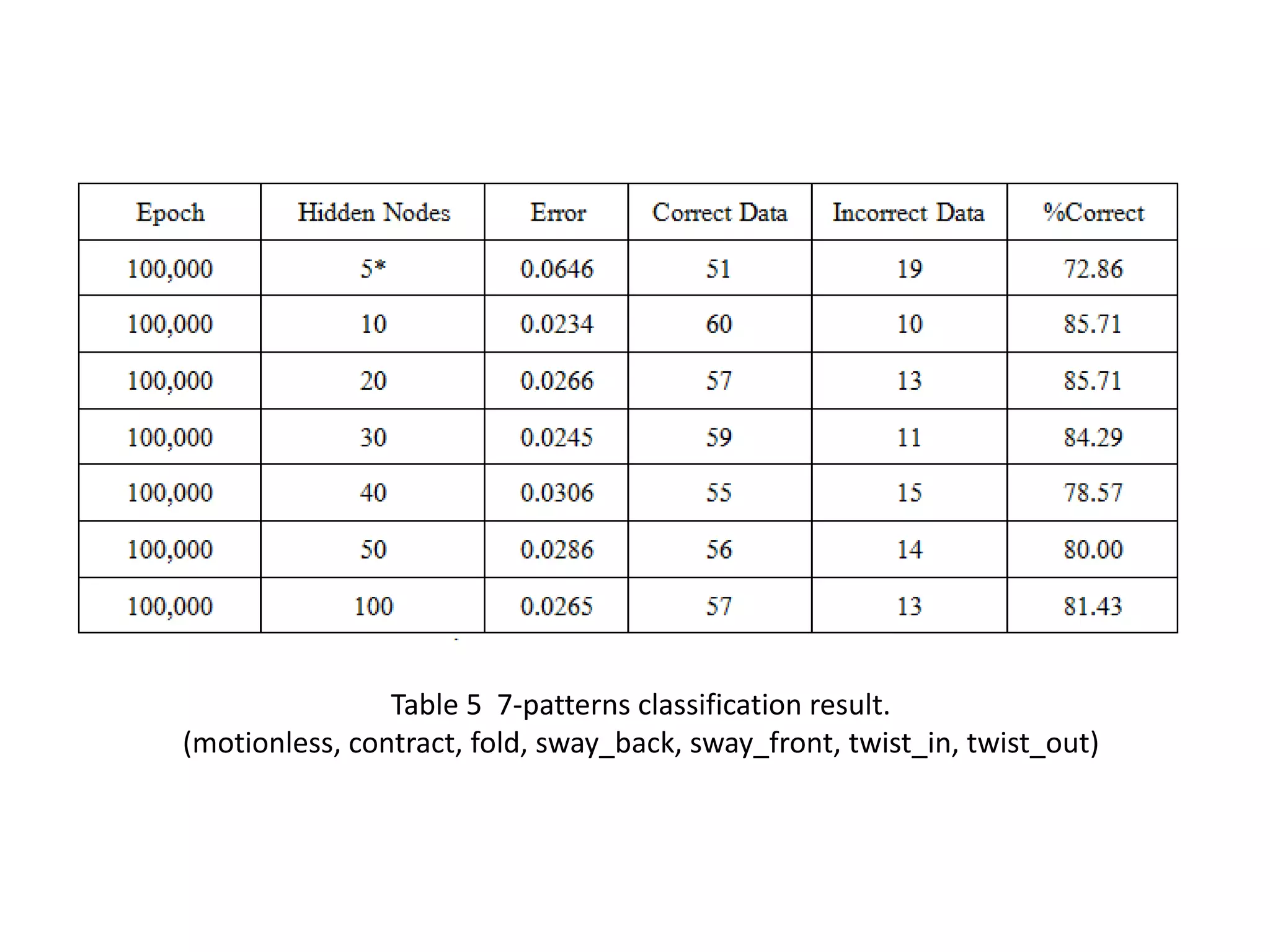
![5. EEG Based Brain Computer Interface [5]
- Test with 1 hidden layer-50 neurons, 1 hidden
layer-100 neurons, 2 hidden layers-50 neurons
and 2 hidden layers-100 neurons Neural
Network.
- Left movement with eyes closed, Right
movement with eyes closed and Left movement
with eyes open are example patterns](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-17-2048.jpg)
![Figure 8 Functional Model of a BCI System [5]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-18-2048.jpg)
![Figure 9 Nihon Kohden Neurofax-21 channel Electroencephalograph [5]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-19-2048.jpg)
![Figure 10 Planning for Left movement with eyes closed [5]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-20-2048.jpg)
![6. A Review of Classification Algorithms for EEG-based Brain-Computer Interfaces [6]
Table 4 Some of classifier properties [6]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-22-2048.jpg)
![7. Artificial Speech Synthesizer Control by Brain-Computer
Interface[7]
- Invasive EEG with Neurotrophic Electrode.
- Gyrus Precentral (a prominent structure in the parietal
lobe of the human brain).
-
Kalman filter-based decoder in Speech Synthesizer](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-23-2048.jpg)
![Figure 11 Schematic of the brain-machine interface for real-time
synthetic speech production [7]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-24-2048.jpg)

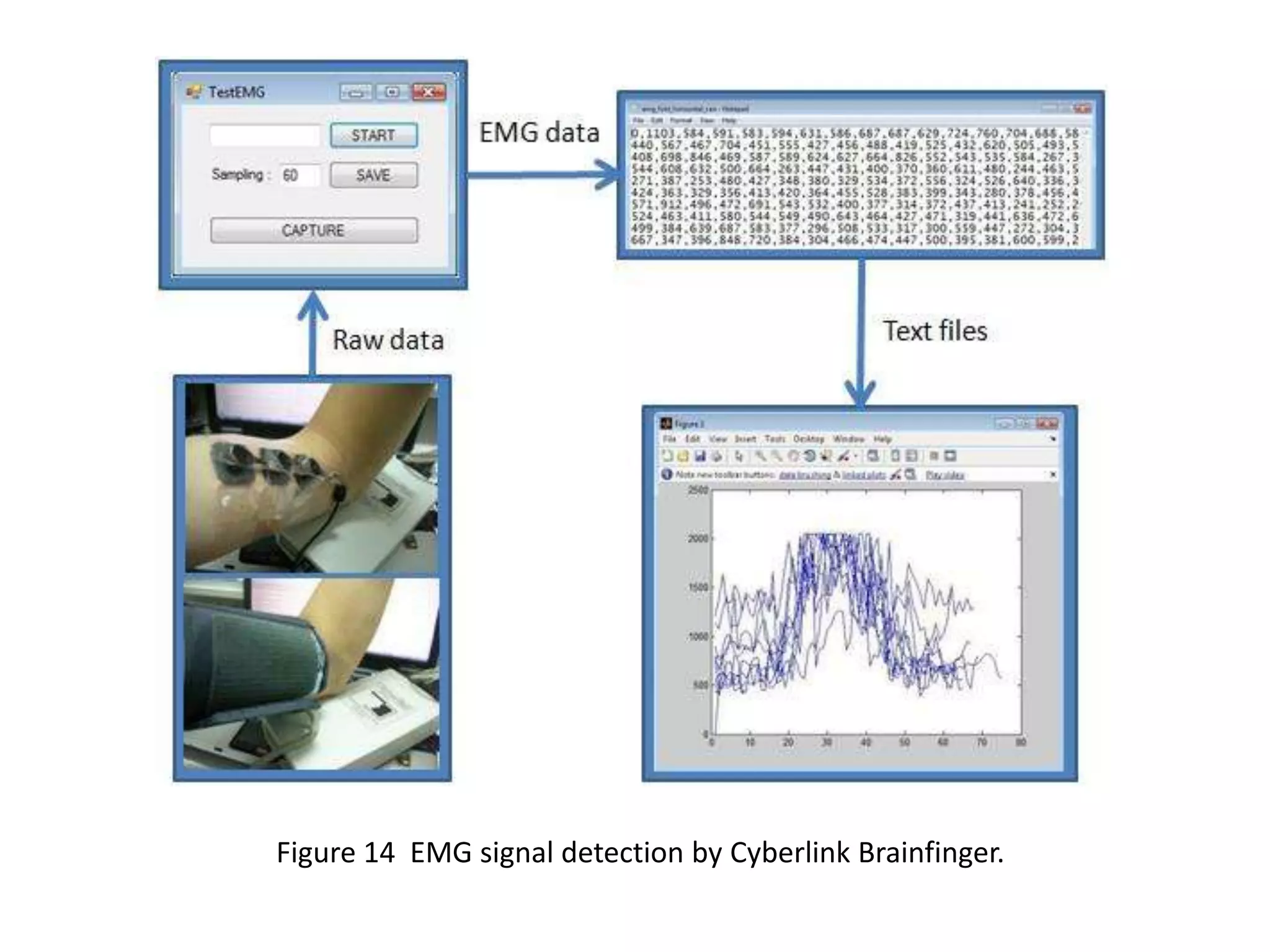
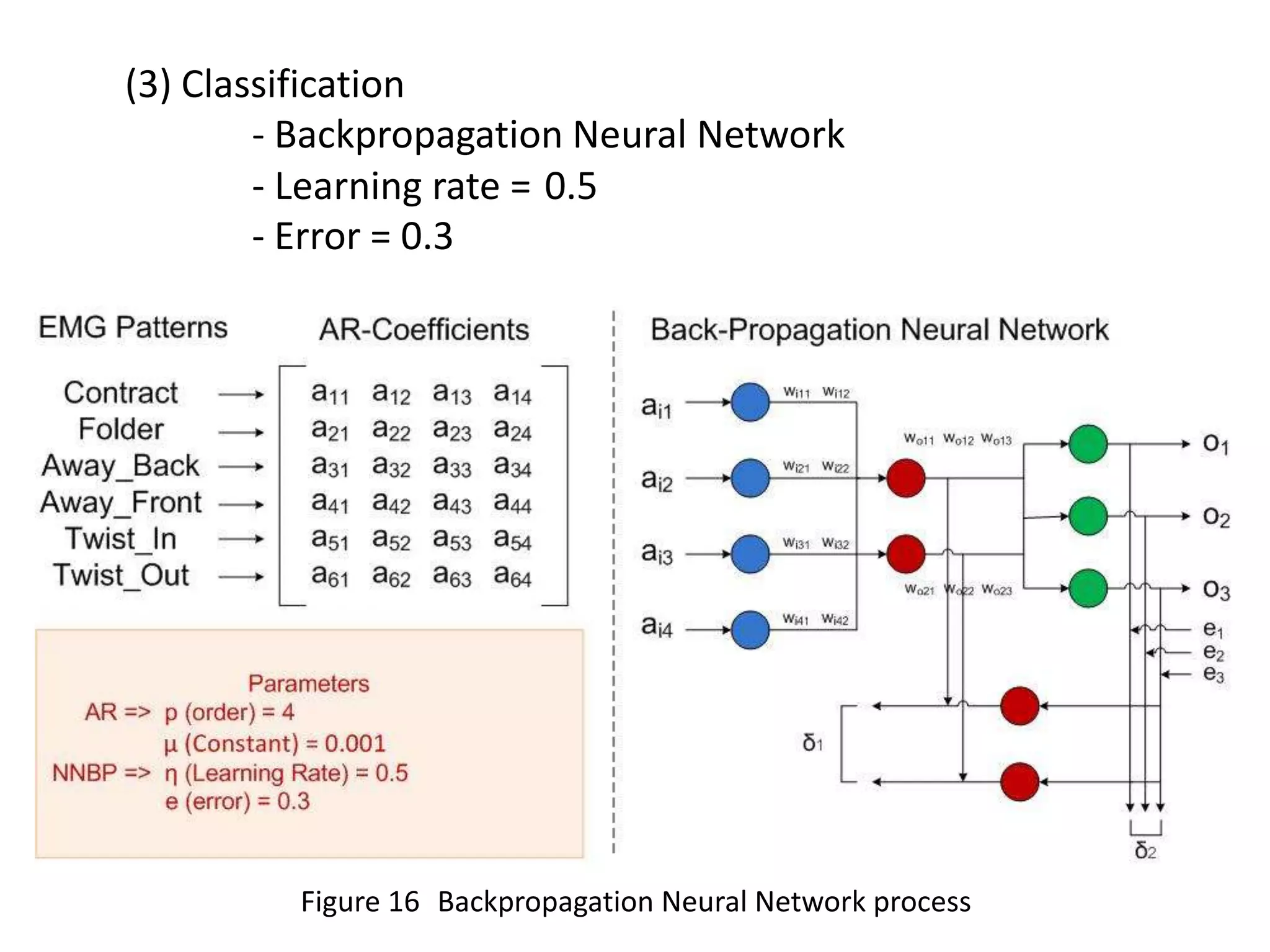
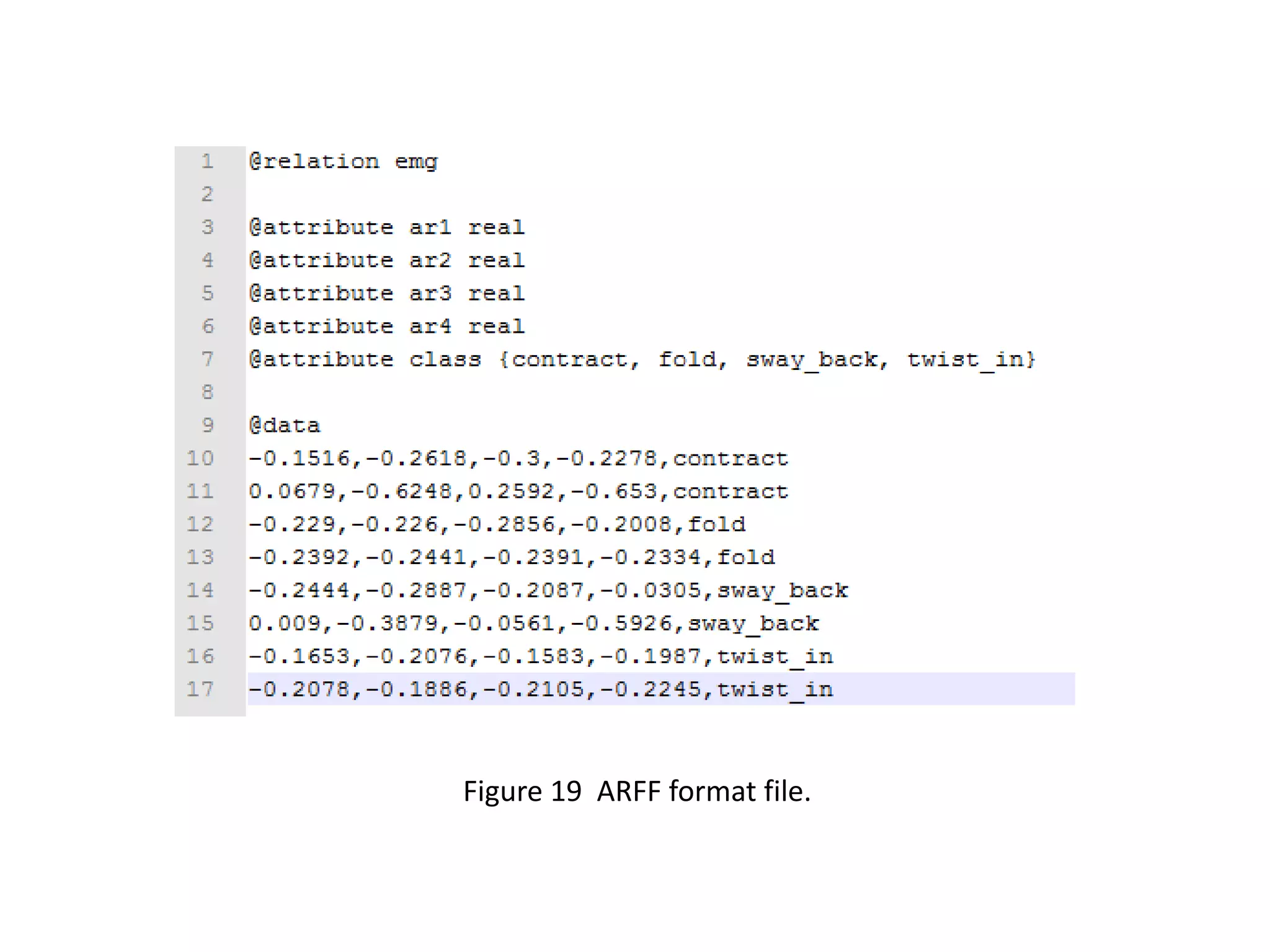
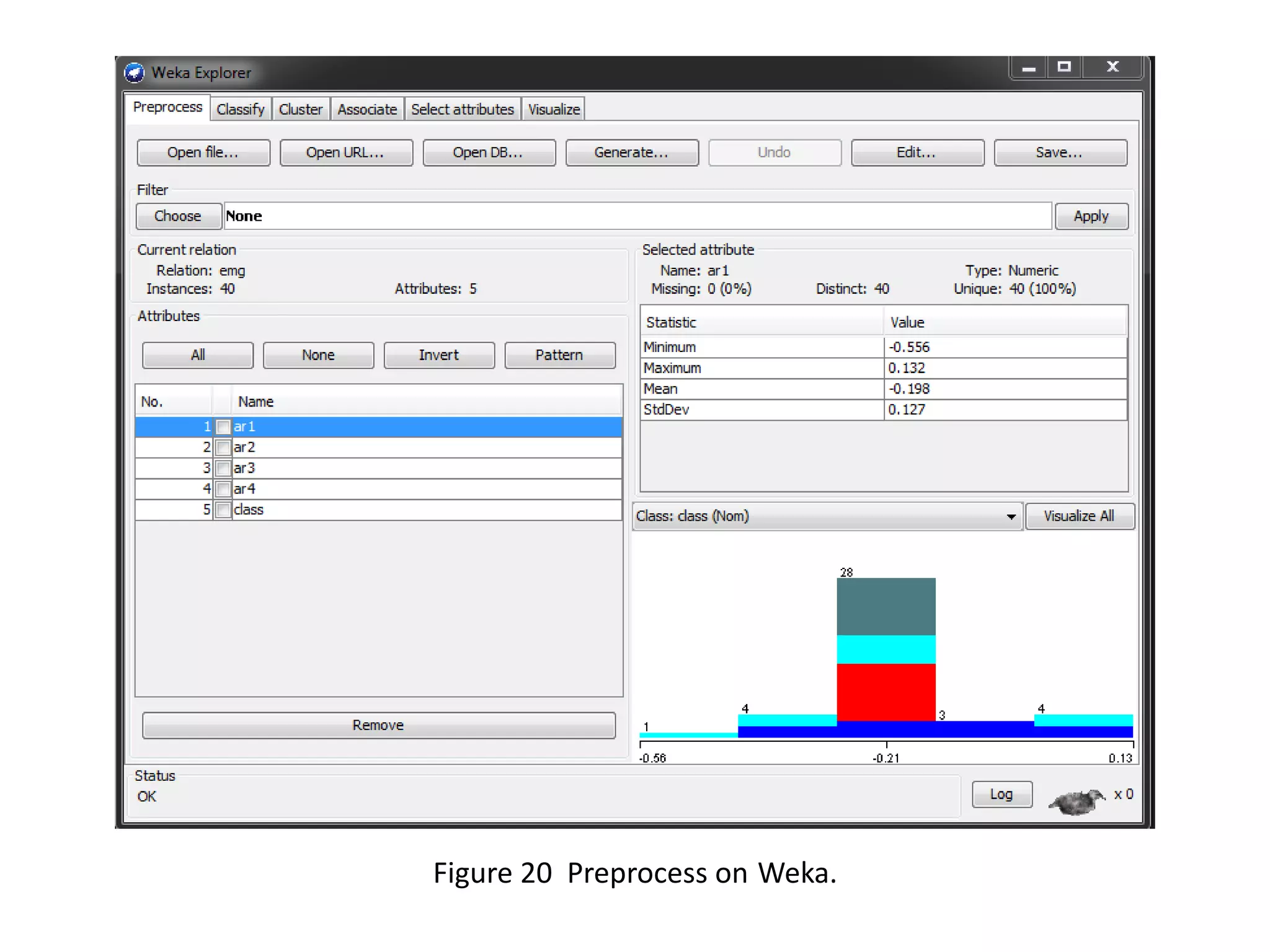
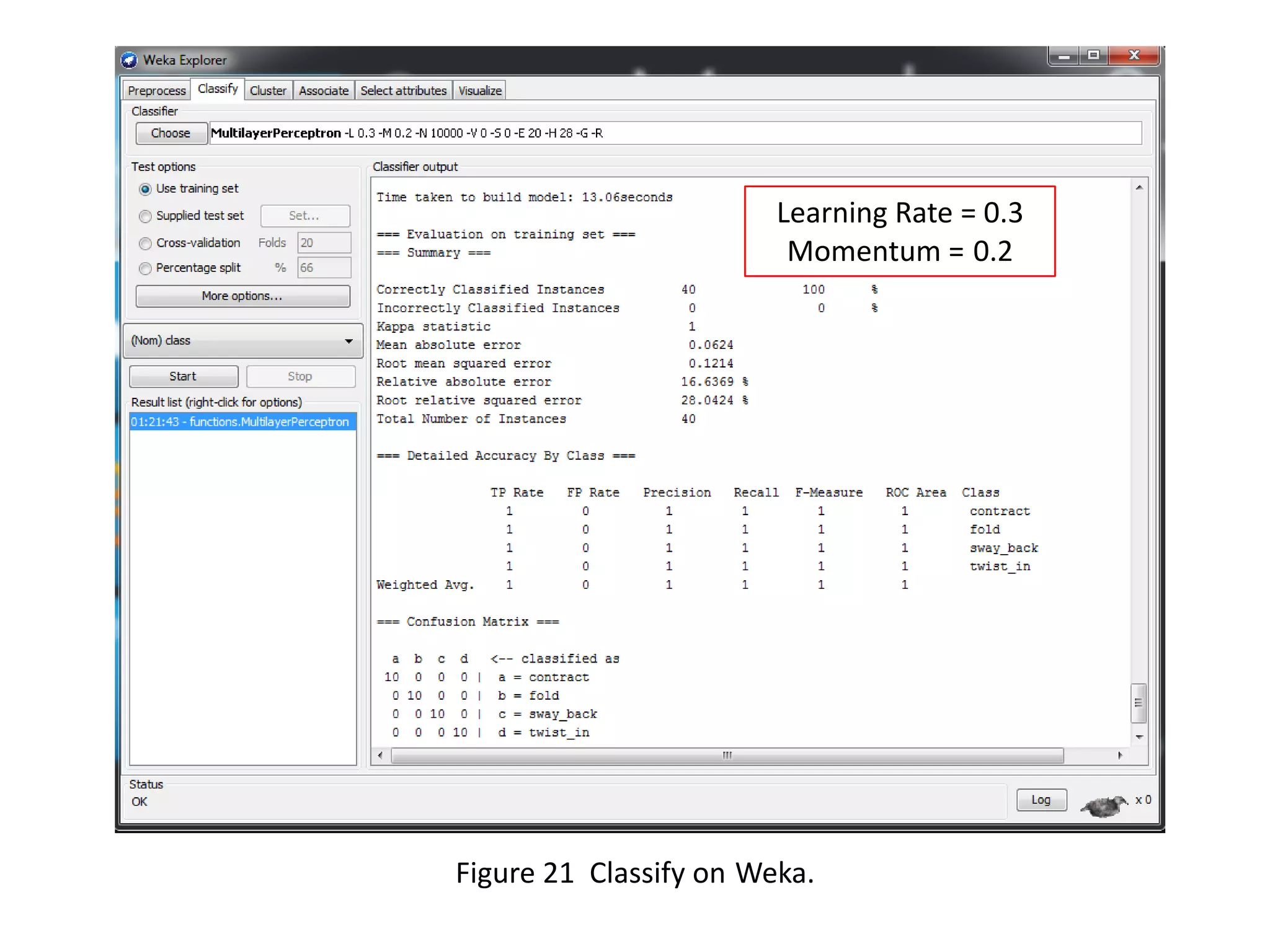
![4. Experiment
4.1 EMG Signal Classification with Autoregresive Model and
Backpropagation Neural Network.
(1) Detection
Figure 12 Cyberlink Brainfinger [8]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-26-2048.jpg)
![Figure 13 Middle of bicep muscle [9]](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-27-2048.jpg)
![(2) Feature Extraction
- AR – Coefficients with Least Mean Square
- Convergence constant (µ) = 0.001 [10]
- Autoregressive order = 4
Figure 15 Autoregressive process](https://image.slidesharecdn.com/wearablebiosignalinterface-131226003042-phpapp02/75/Wearable-BioSignal-Interface-31-2048.jpg)
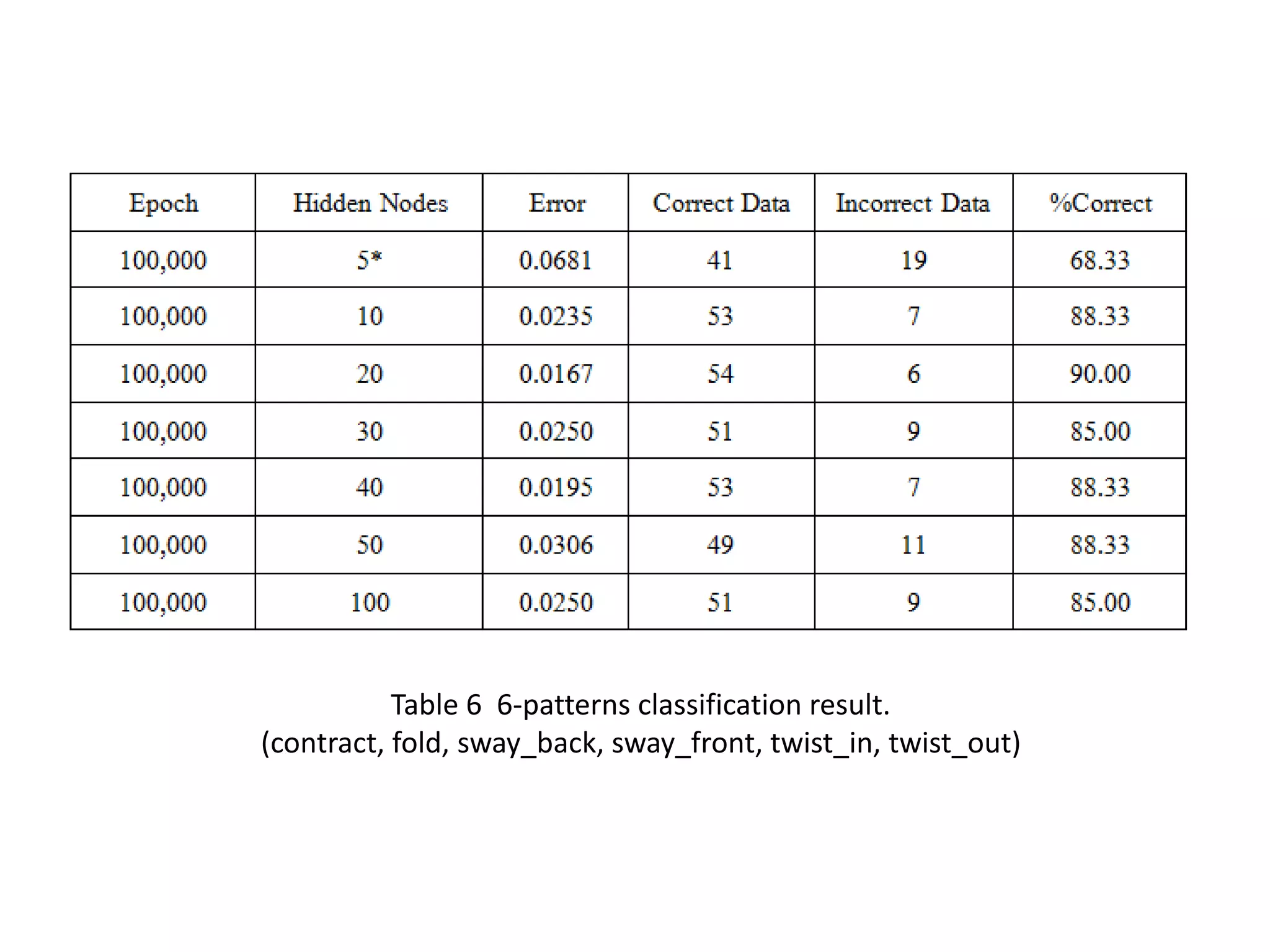
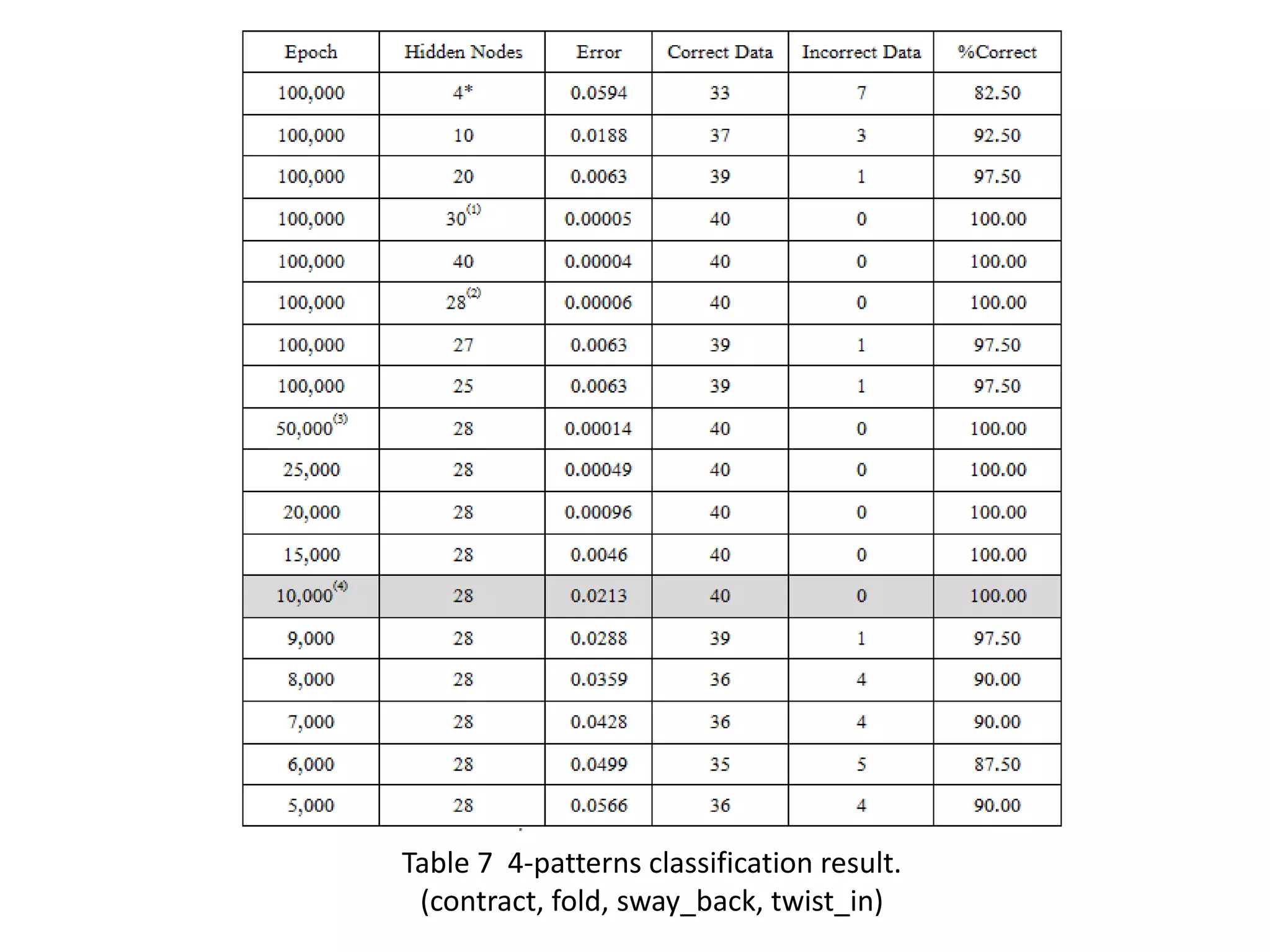
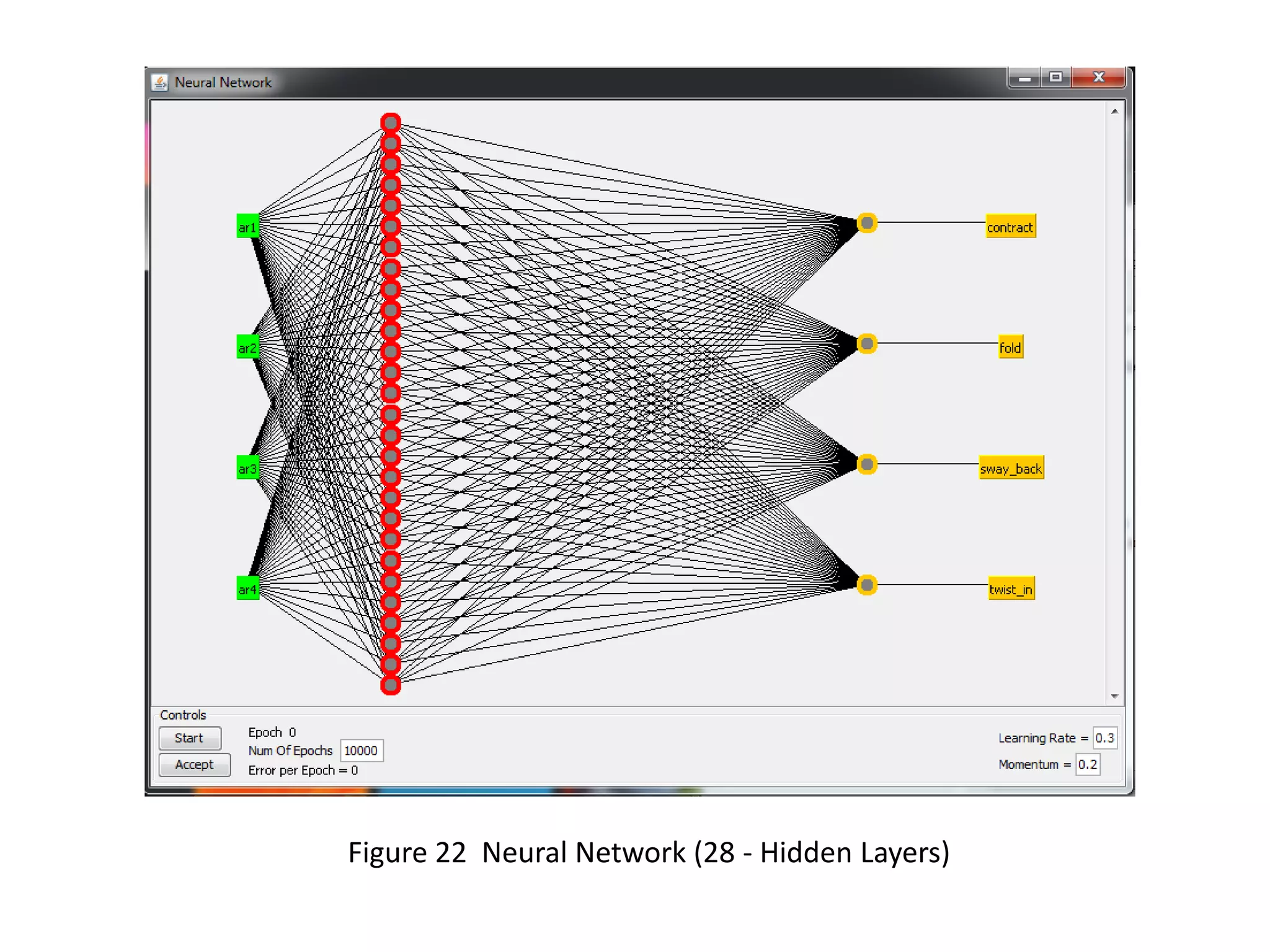


The document presents a study on a wearable biosignal interface aimed at understanding bio-electric signals for device control, emphasizing various classification approaches and literature on brain-computer interfaces. It discusses system architecture, accuracy of pattern recognition, and challenges in emotion classification via EEG data. Key findings highlight the potential for improved classification with neural network architectures, but note limitations due to low accuracy from limited training data.







































![EEG BASED MOTOR IMAGERY DECODING [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/eegbasedmotorimagerydecodingautosaved-251208043154-f4c6e54a-thumbnail.jpg?width=640&height=640&fit=bounds)



































![Technology Management and Strategy [Part IV]](https://cdn.slidesharecdn.com/ss_thumbnails/technologymanagementandstrategypartiv-140803030243-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




















