Downloaded 100 times




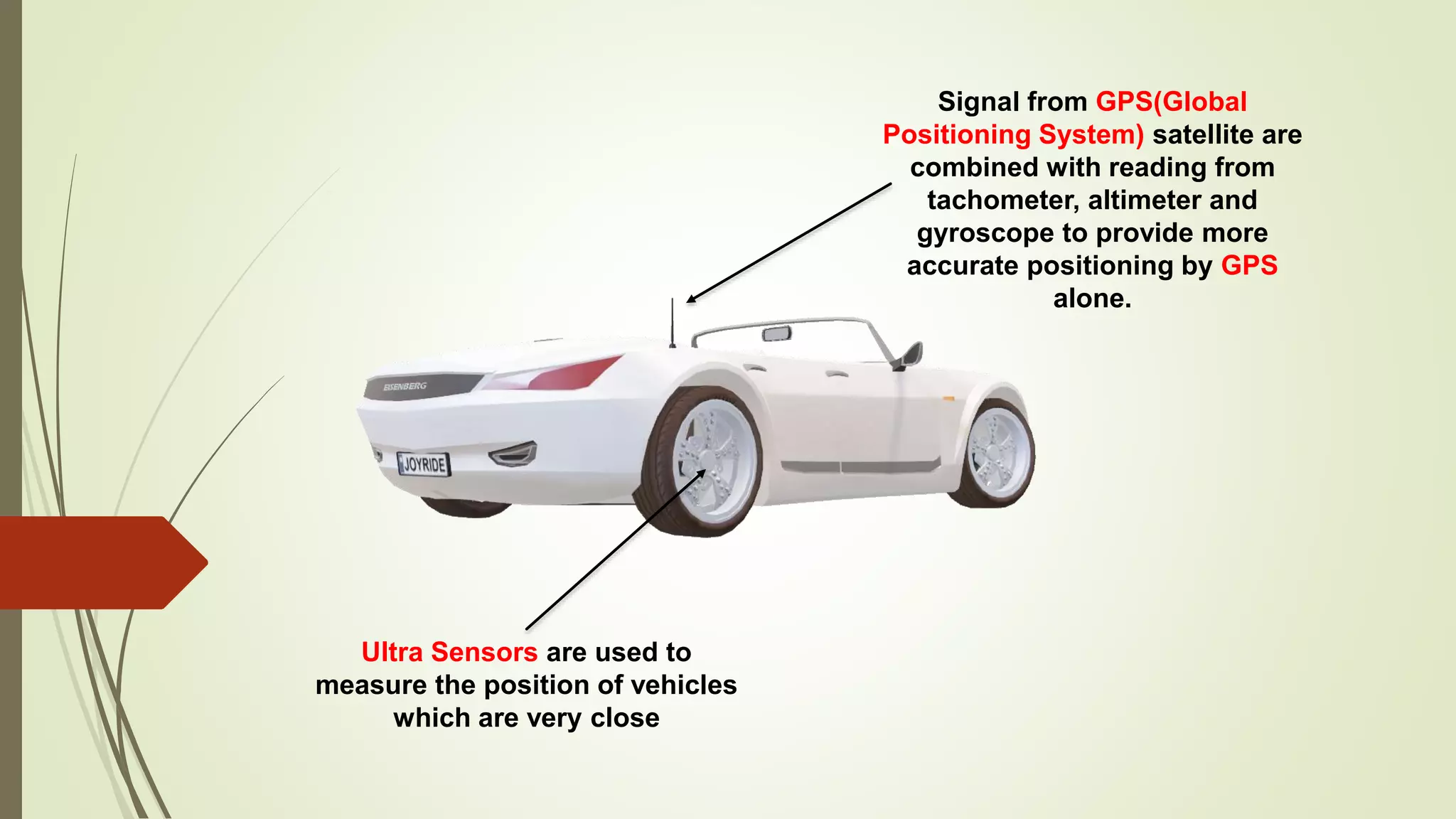
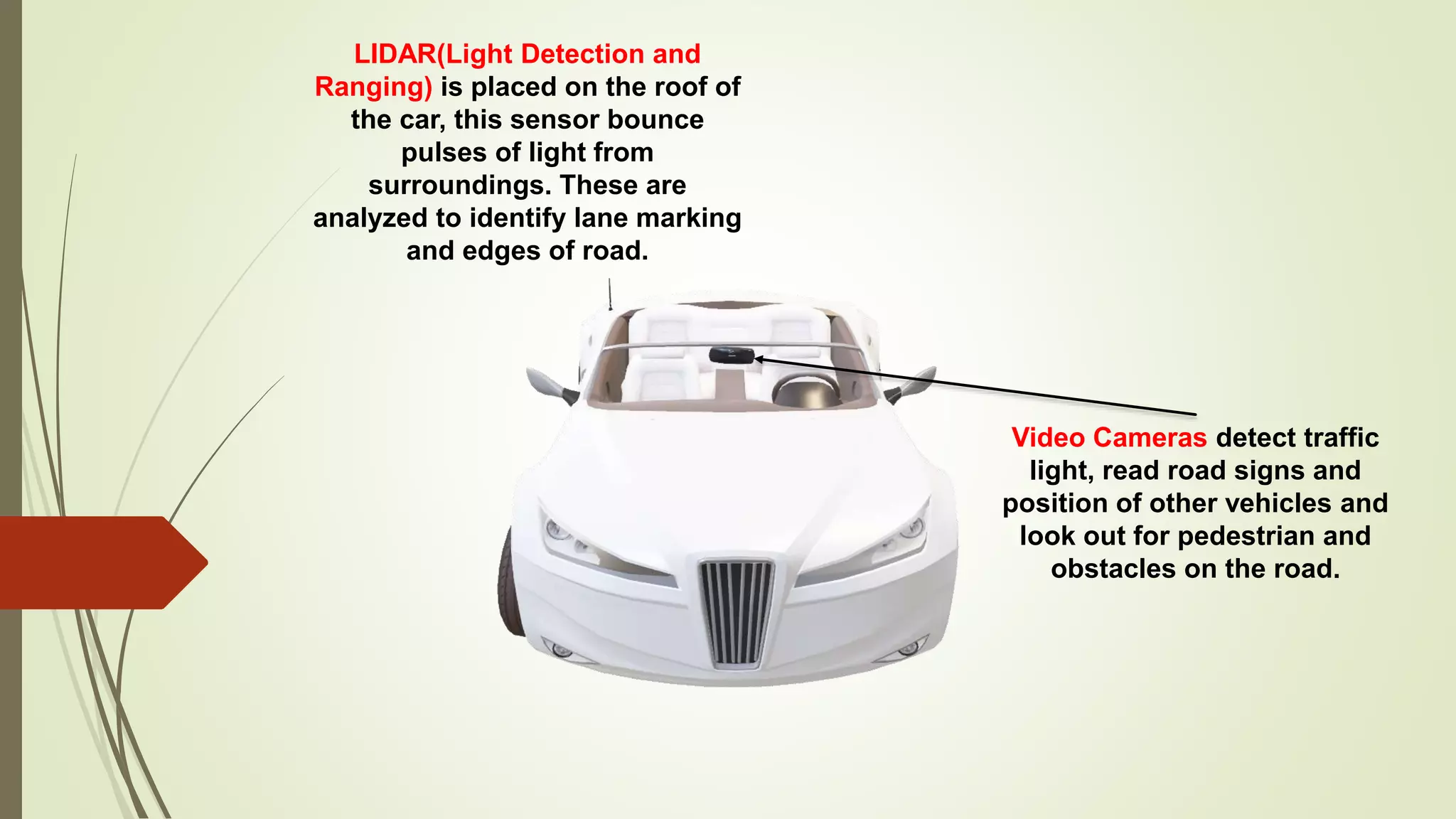


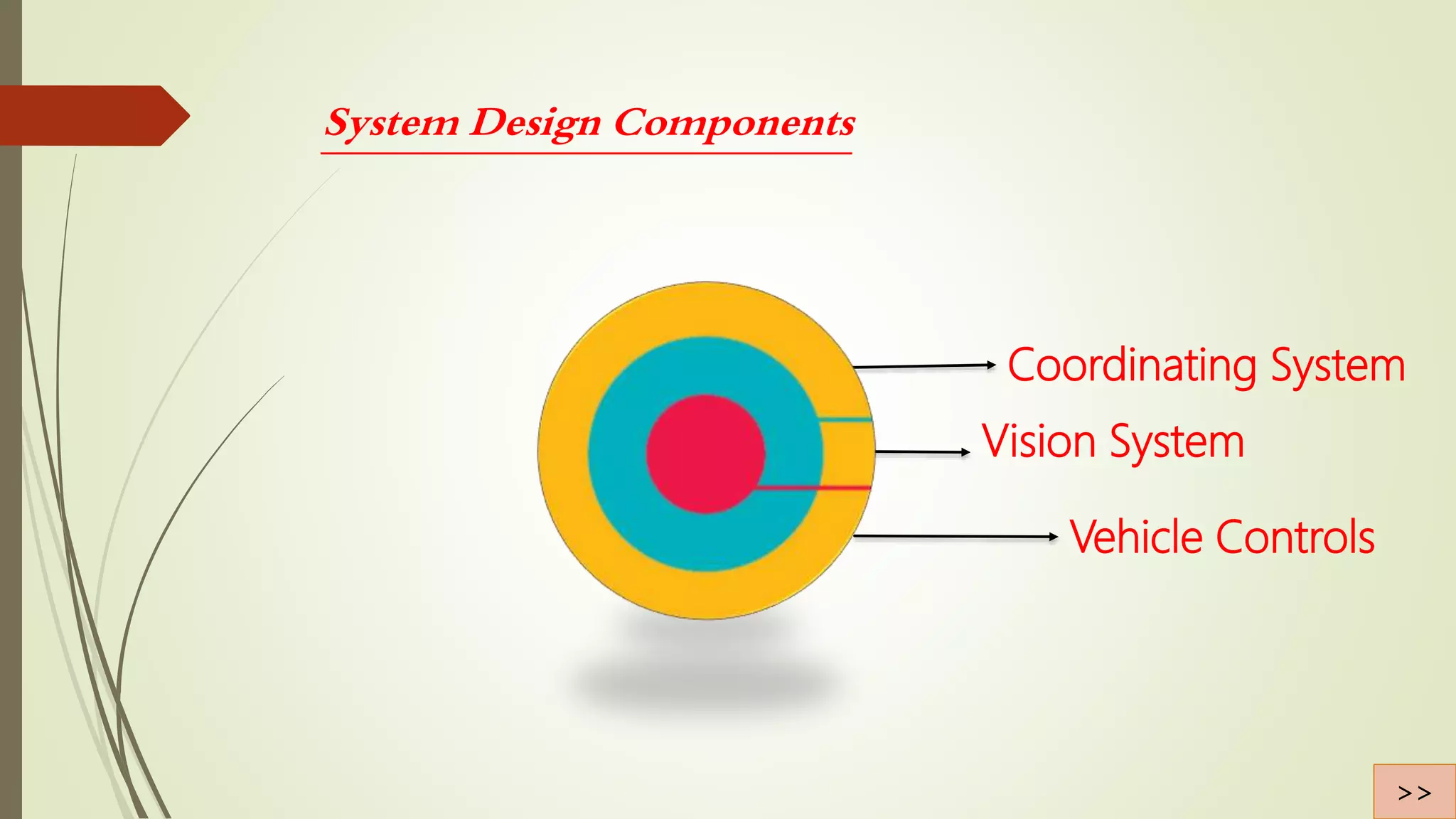




Waymo was originally a Google self-driving car project and is now a standalone company called Waymo. Waymo's mission is to make transportation safe, easy, and accessible to all without requiring a human driver. Waymo's self-driving cars use sensors like radar, lidar, and cameras to detect surroundings from long distances in all directions. The information from these sensors is analyzed by a central computer that controls the vehicle's steering, acceleration, and braking. Waymo has been testing self-driving cars on public roads since 2009 and launched a pilot program in Phoenix, AZ in 2017 for residents to ride in the self-driving vehicles.