Downloaded 241 times








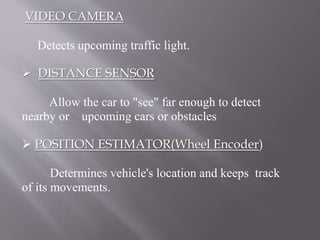














The document discusses Google's self-driving car project. It describes how the cars can steer, accelerate, and stop autonomously using sensors like LIDAR and cameras to detect obstacles and artificial intelligence to process sensor data and determine driving actions. The cars have driven over 1 million miles with only minor accidents. While driverless cars could help avoid accidents and manage traffic, cybersecurity risks would need to be addressed to prevent hackers from interfering with vehicle control systems.
















![Autonomous vehicles[1]](https://cdn.slidesharecdn.com/ss_thumbnails/autonomousvehicles1-101119105539-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






































































