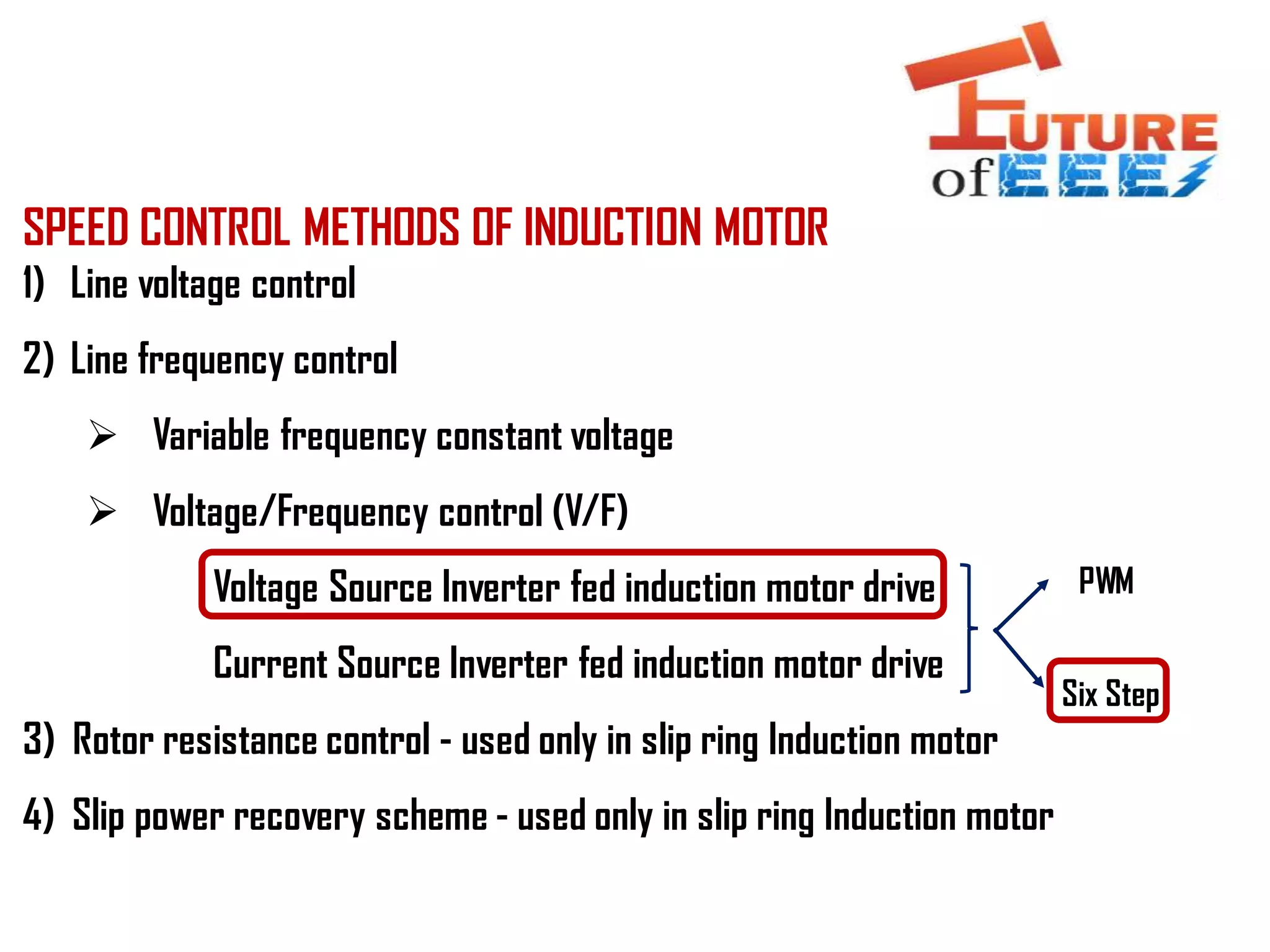
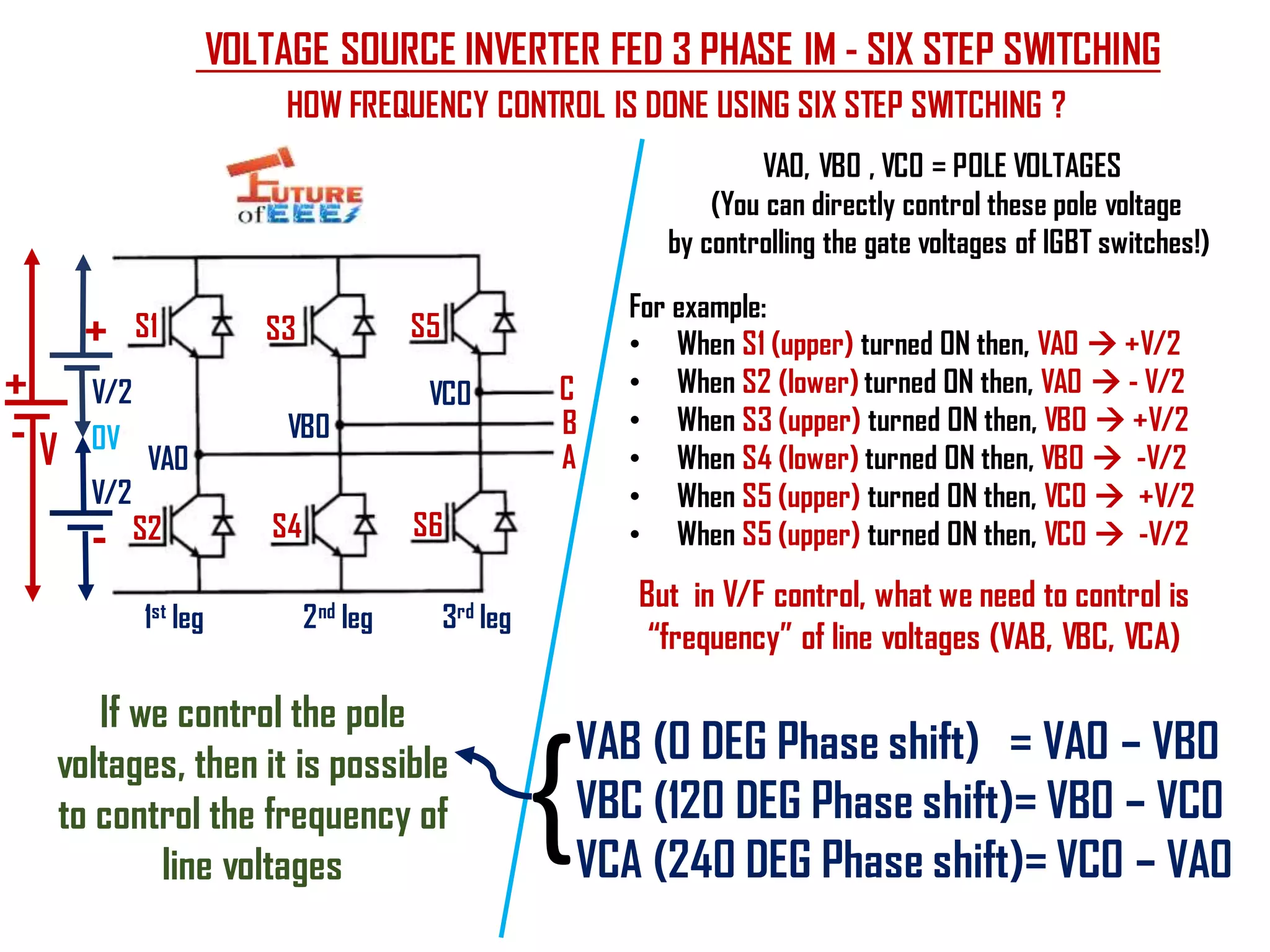
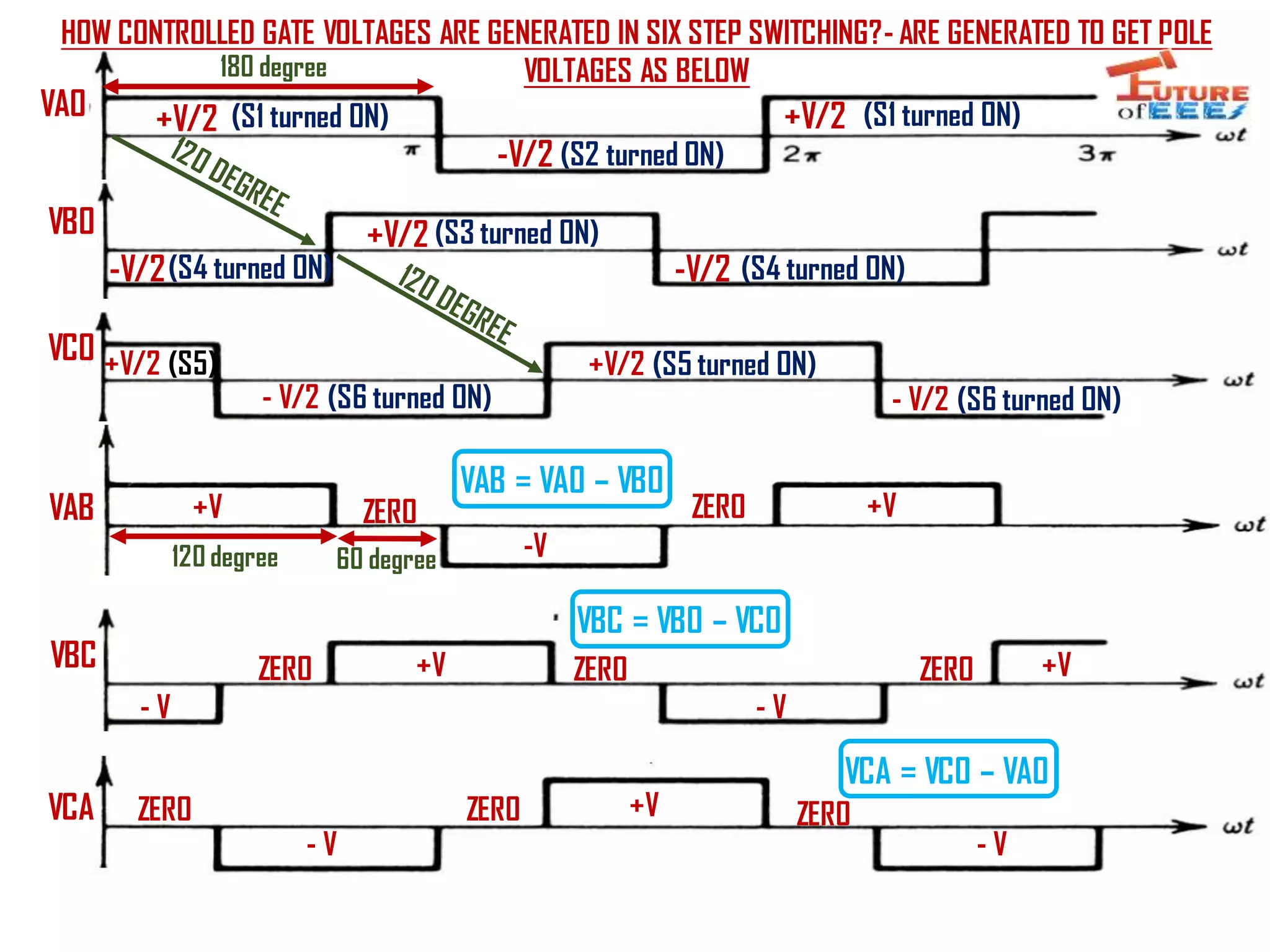
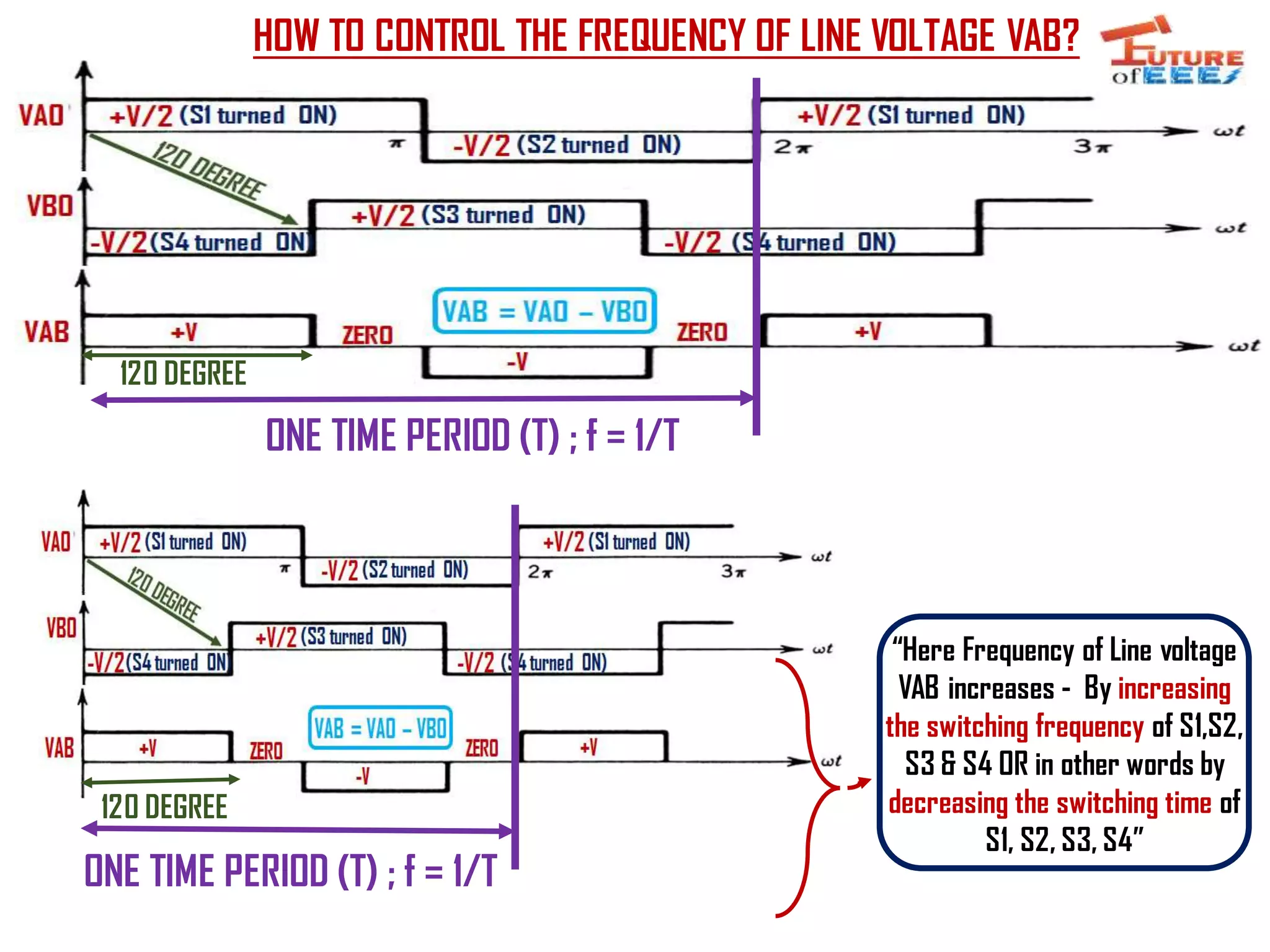
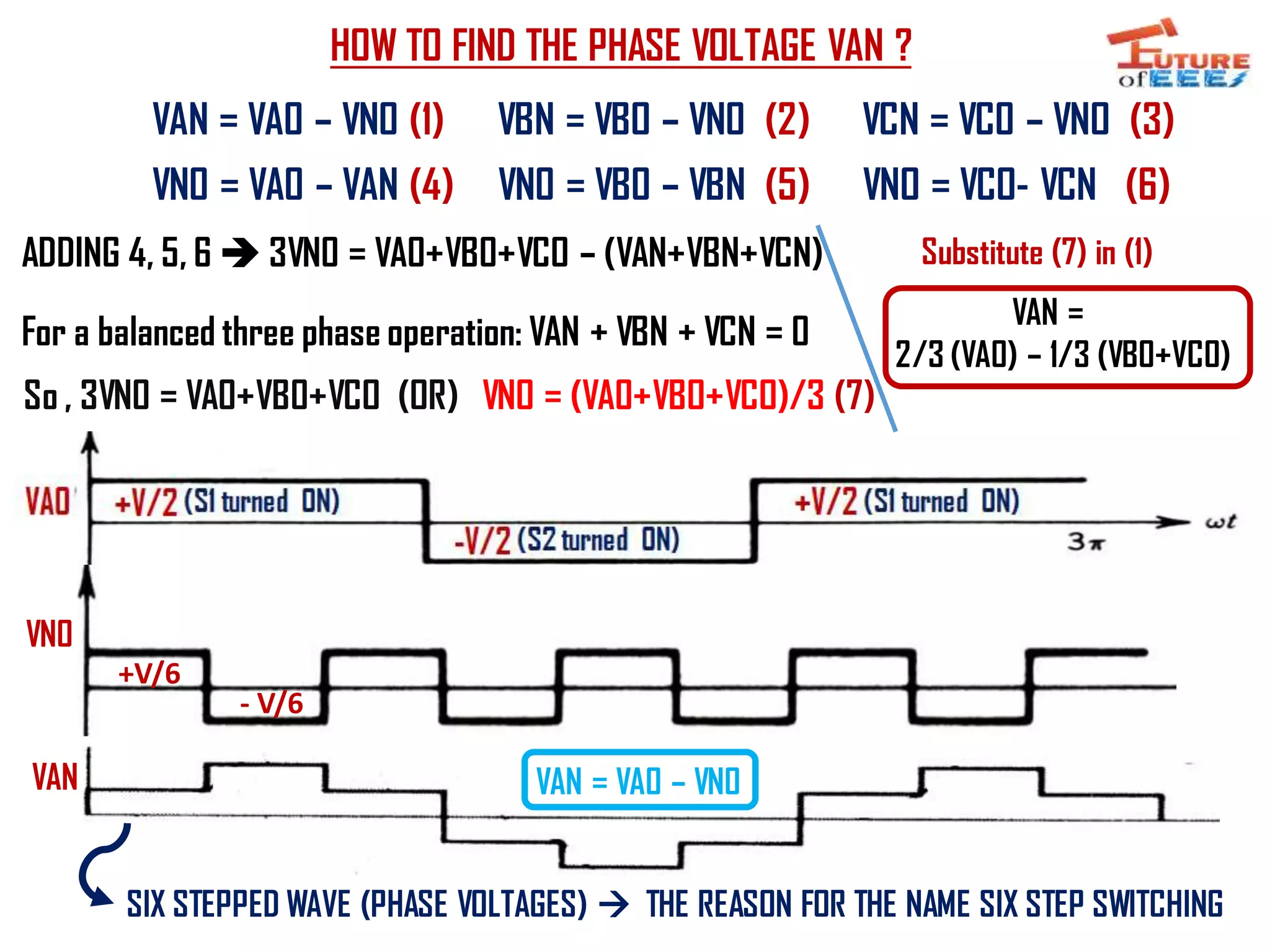
The document discusses various speed control methods for induction motors, including line voltage control, line frequency control, rotor resistance control, and slip power recovery schemes, primarily focusing on the application of variable frequency constant voltage methods through voltage/frequency control. It explains how six-step switching in voltage source inverter fed systems can control pole voltages and subsequently manage the line voltage frequencies. Additionally, the document outlines the relationship between pole voltages and phase voltages in a balanced three-phase operation.