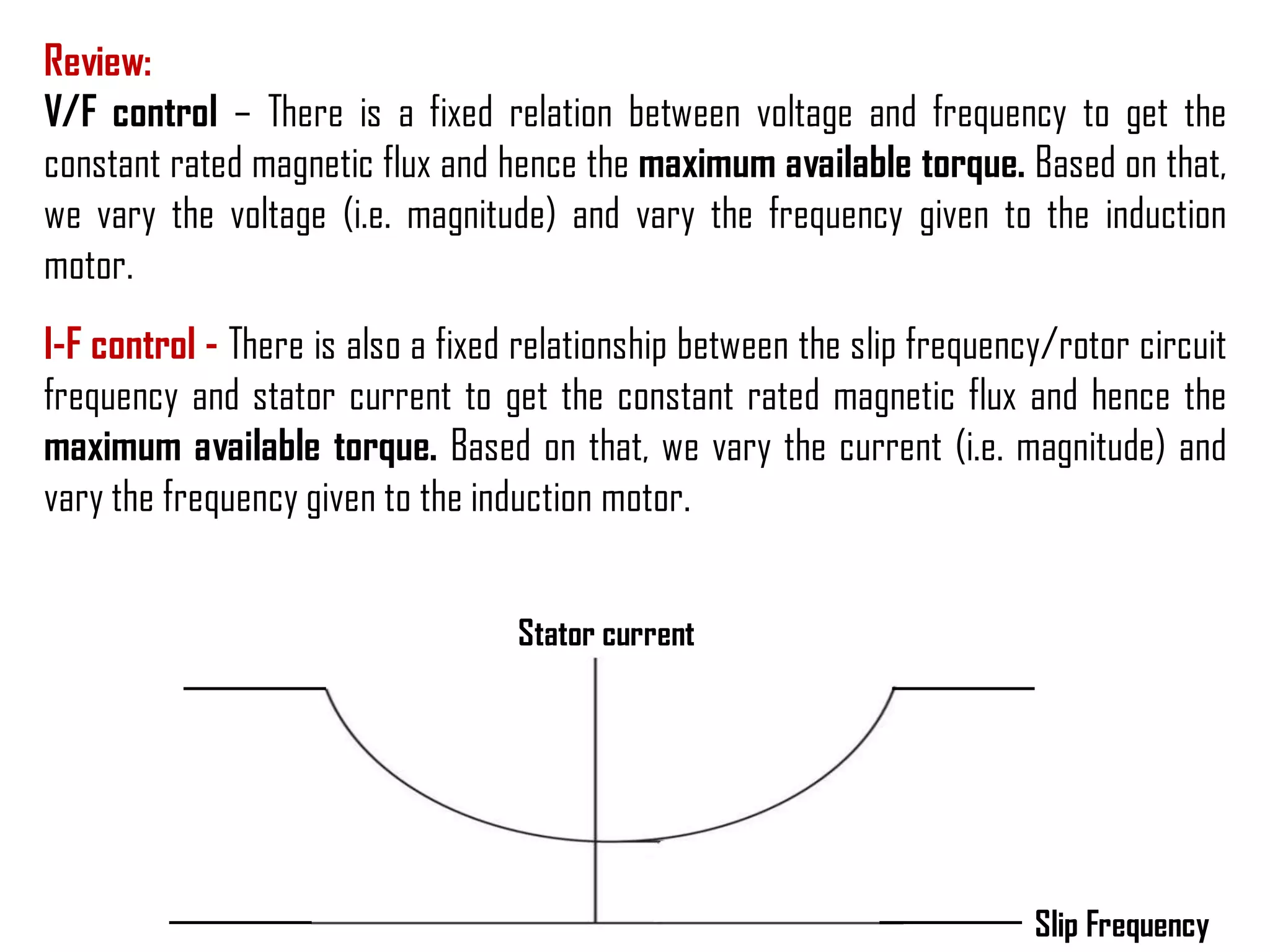
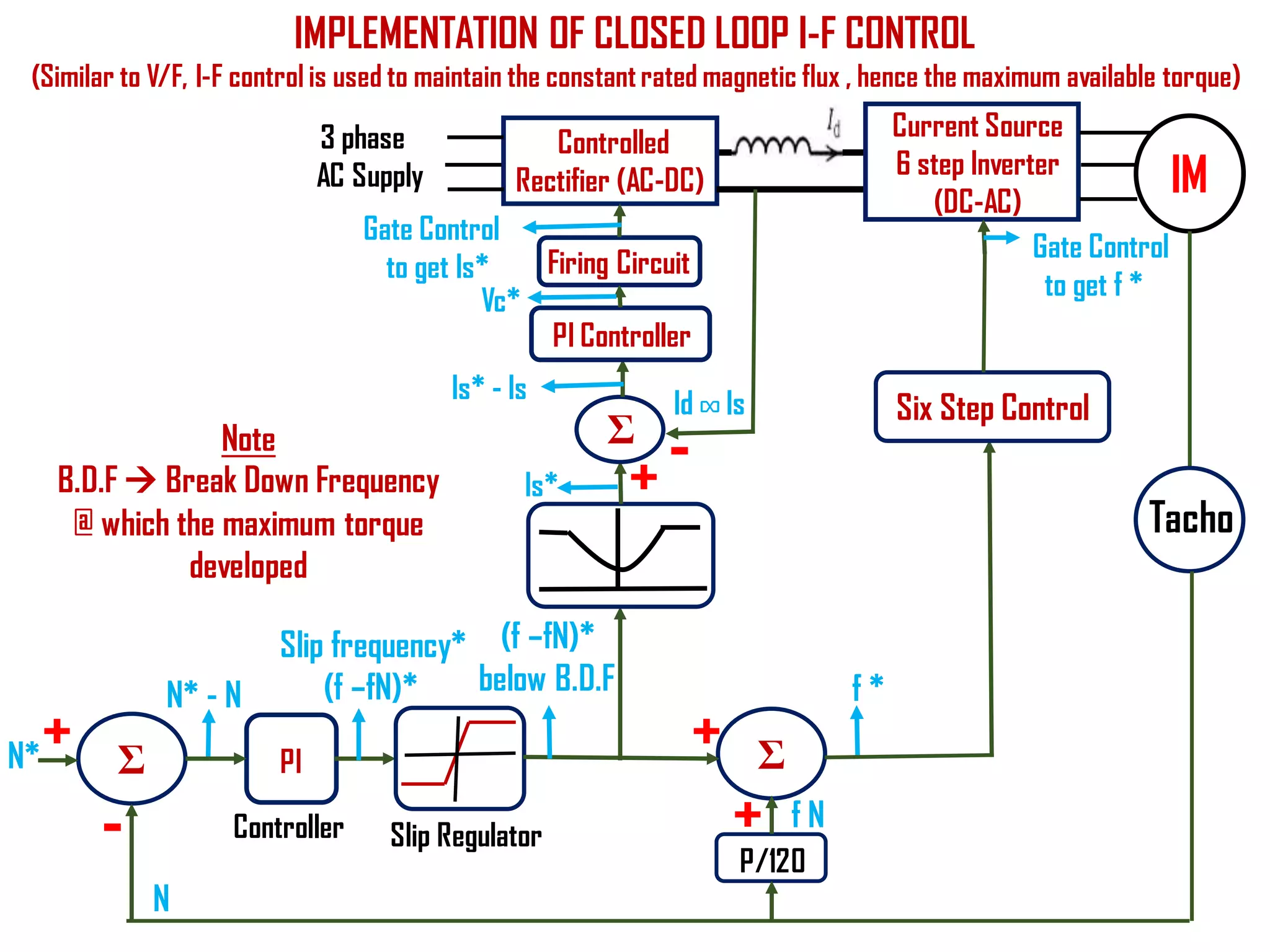
The document discusses various speed control methods for induction motors, including line voltage control, line frequency control, rotor resistance control, and slip power recovery schemes. It elaborates on voltage/frequency (v/f) control and current source inverter (i-f) control to maintain constant rated magnetic flux for maximum torque. Additionally, the document covers the implementation of closed loop i-f control and the necessary components for achieving precise motor control.