The document provides an overview of vector spaces and related concepts:
(1) Historically, ideas around vector spaces date back to the 17th century but received a more abstract treatment in 1888 by Giuseppe Peano. Key developments include Grassmann introducing vector spaces in 1844 and Peano providing a definition of vector spaces and linear maps.
(2) A vector space is a set that is closed under vector addition and scalar multiplication. It allows objects called vectors to be added and multiplied by numbers called scalars. Real numbers are often used as scalars but other fields can also be used.
(3) For a set to be a vector space, the basic operations of vector addition and scalar multiplication must satisfy



![Example
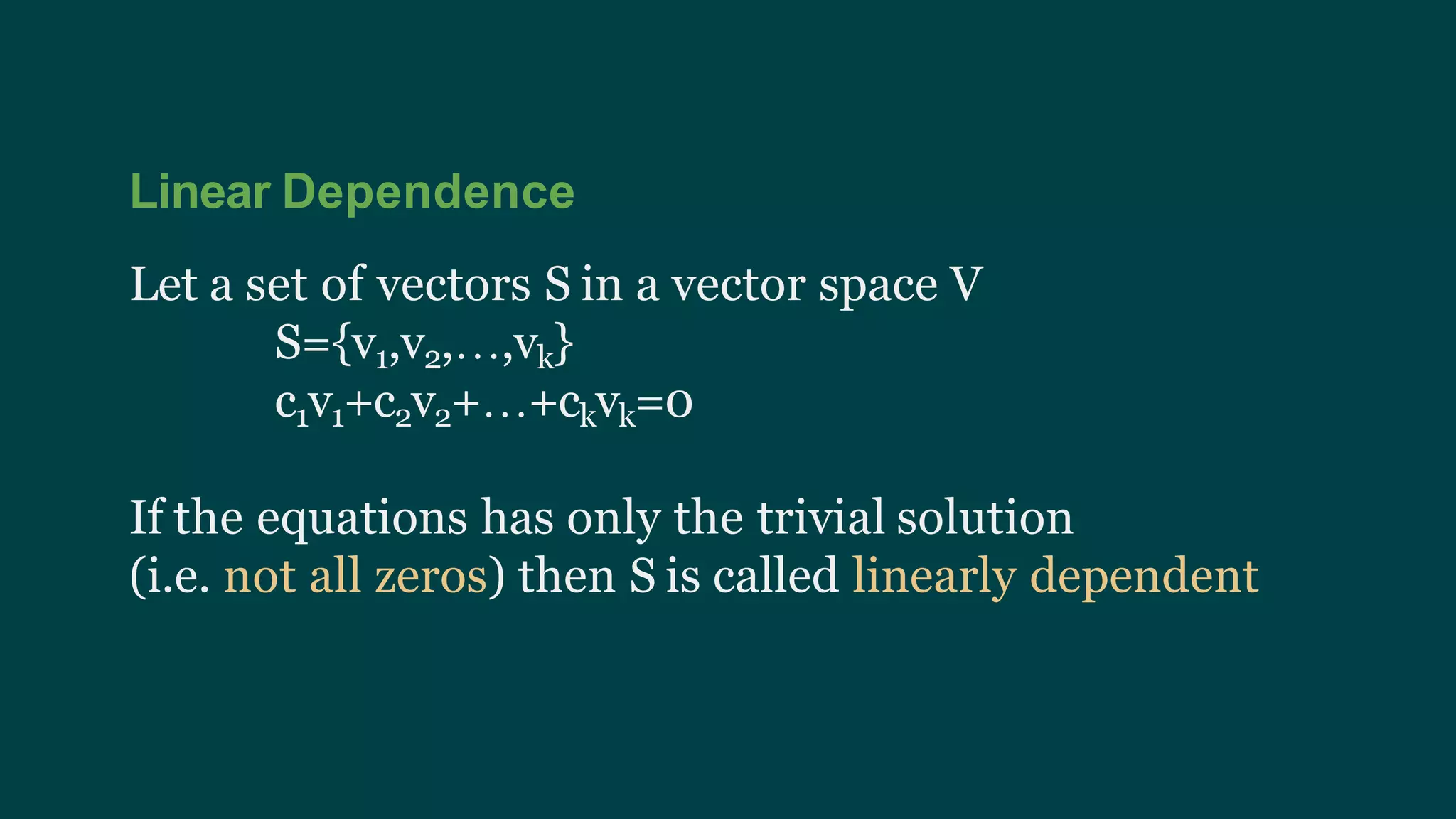
Let
a = [1 2 3 ] b = [ 4 5 6 ] c=[5 7 9]
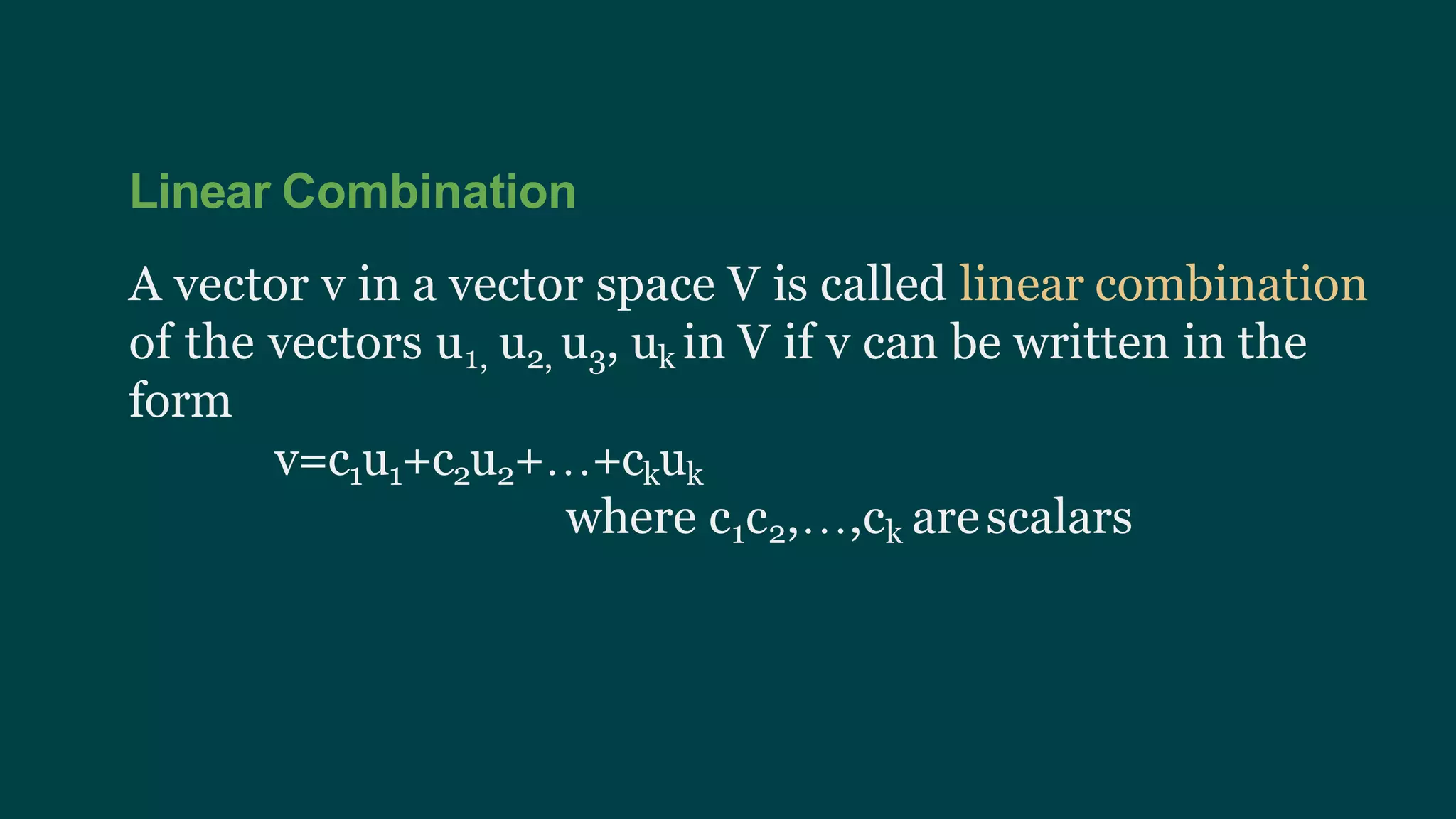
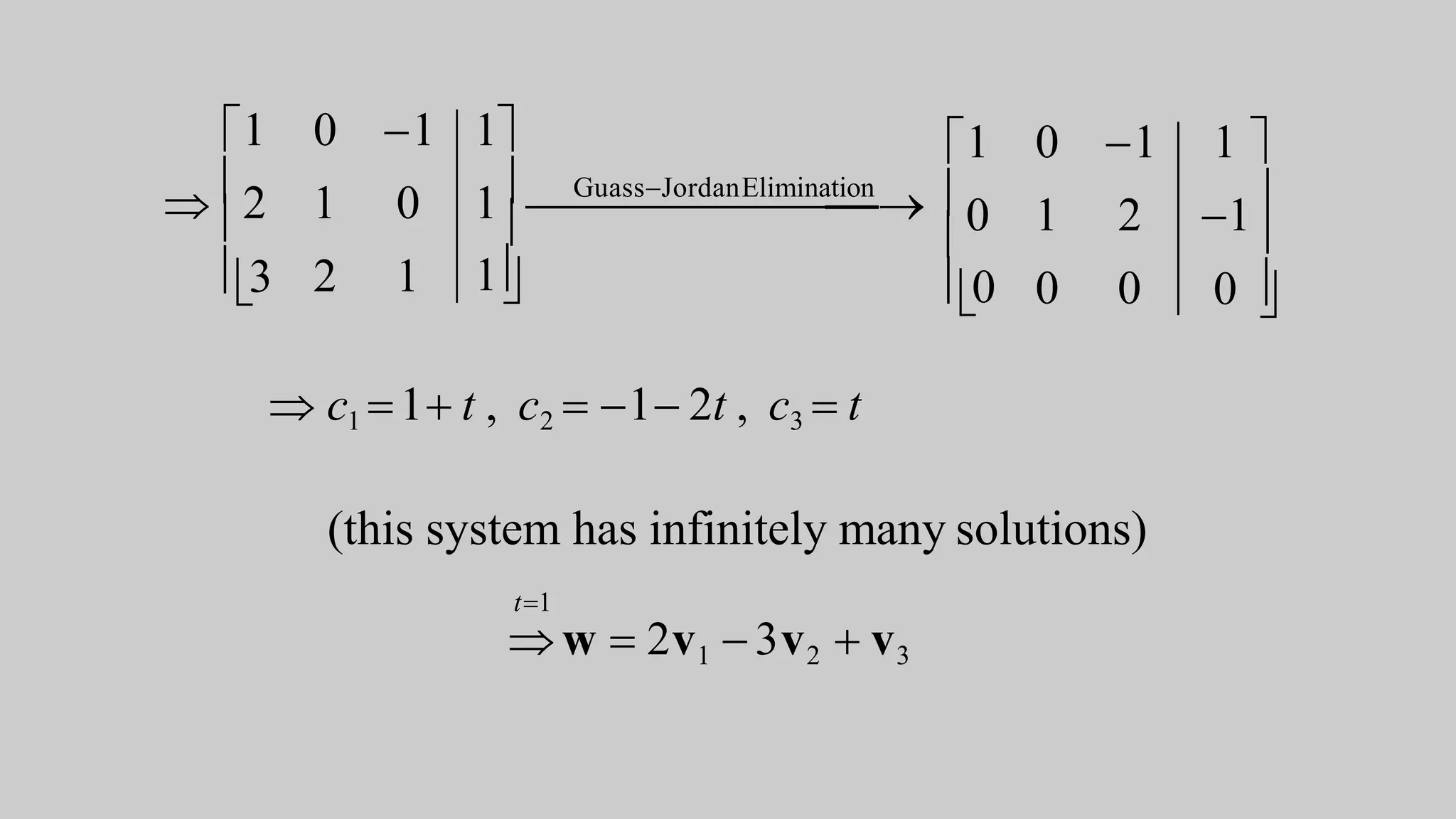
Vector c is a linear combinationof
vectors a and b, because c =a +b.
Therefore, vectors a, b, and c islinearly
dependent.](https://image.slidesharecdn.com/vectorspace-190517010151/75/Vectorspace-in-2-3and-n-space-45-2048.jpg)
![Example
Let
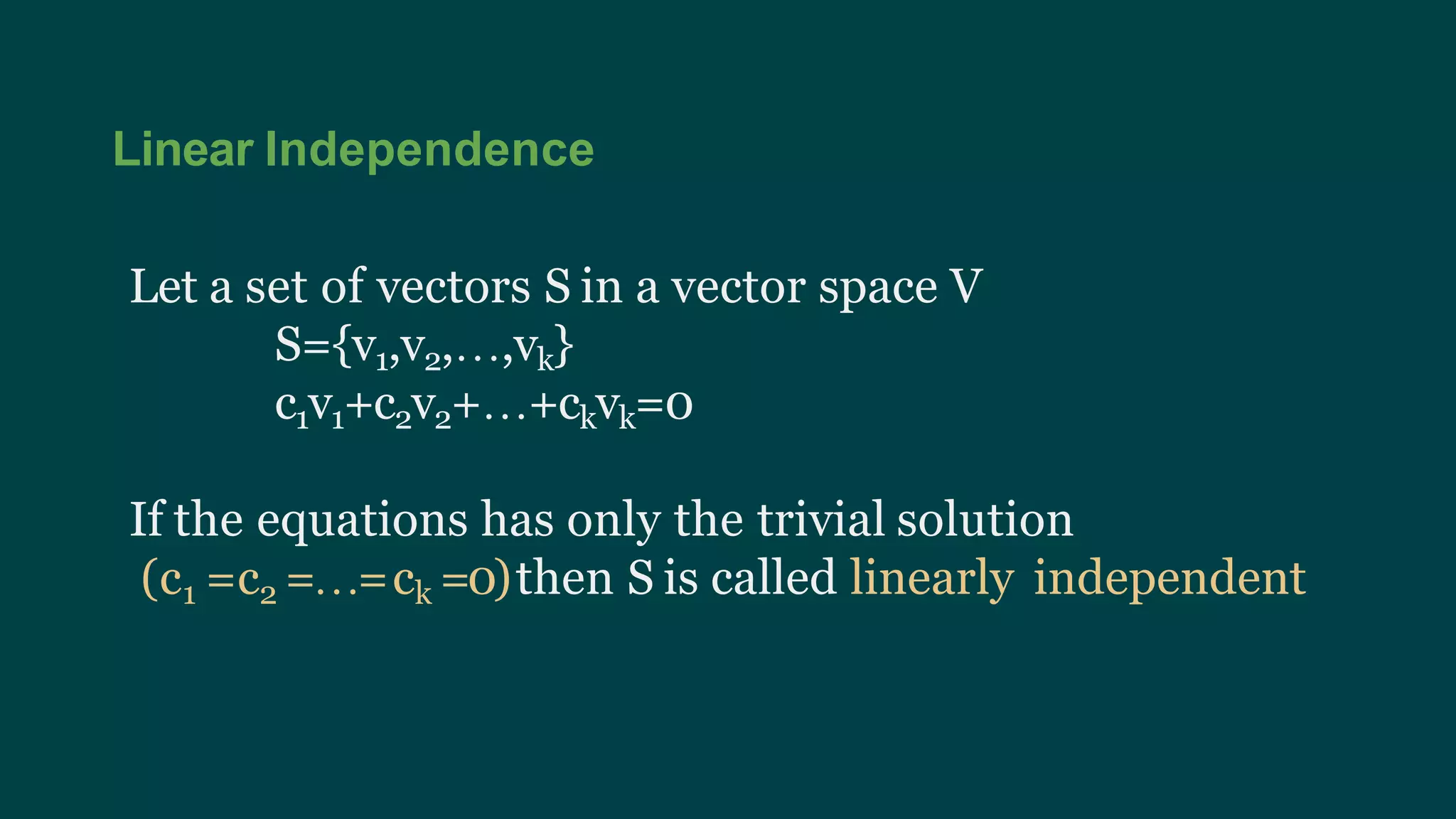
a = [1 2 3 ] b = [ 4 5 6]
Vectors a and b are linearly
independent, because neither vector is
a scalar multiple of the other.](https://image.slidesharecdn.com/vectorspace-190517010151/75/Vectorspace-in-2-3and-n-space-47-2048.jpg)