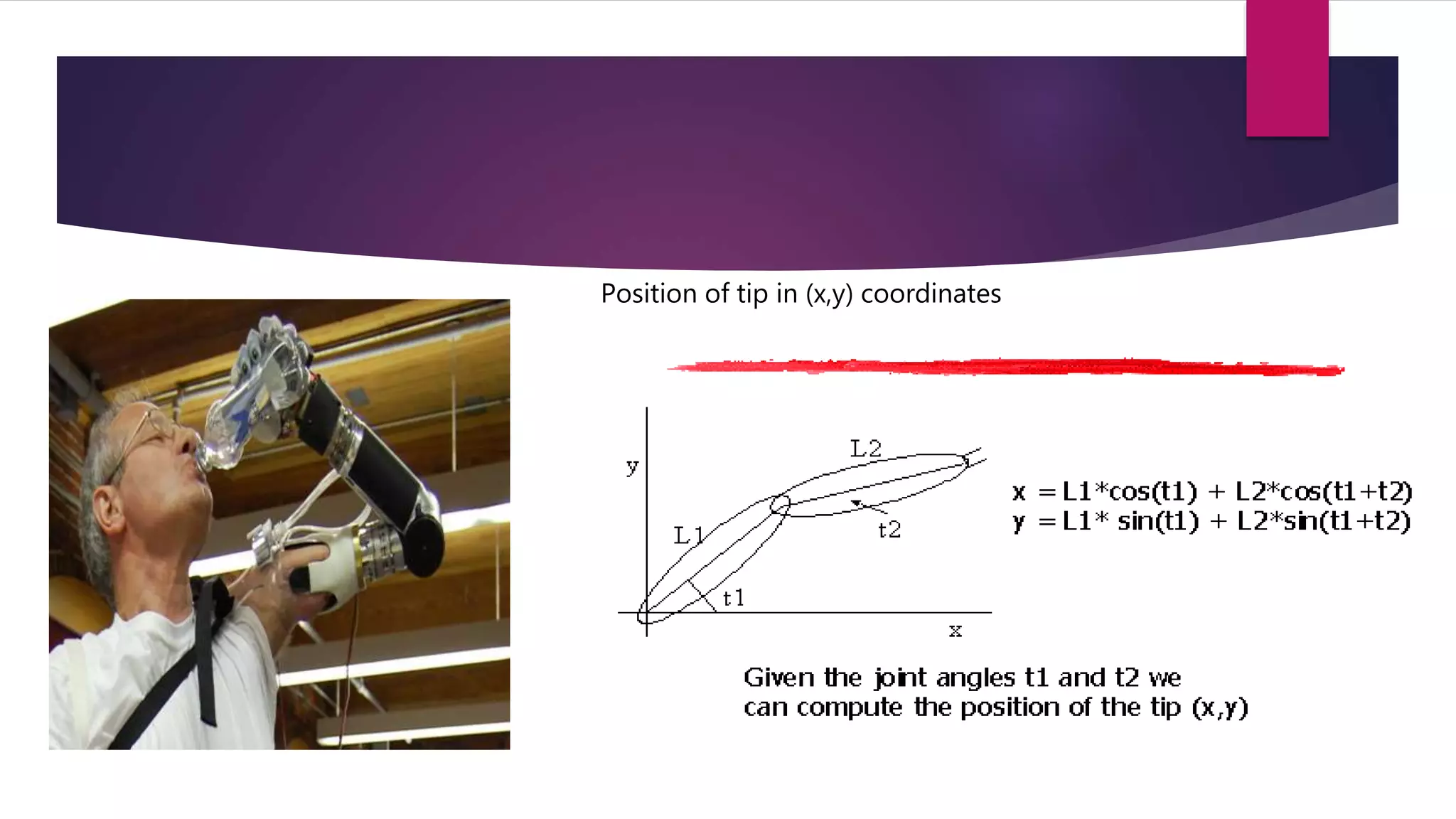
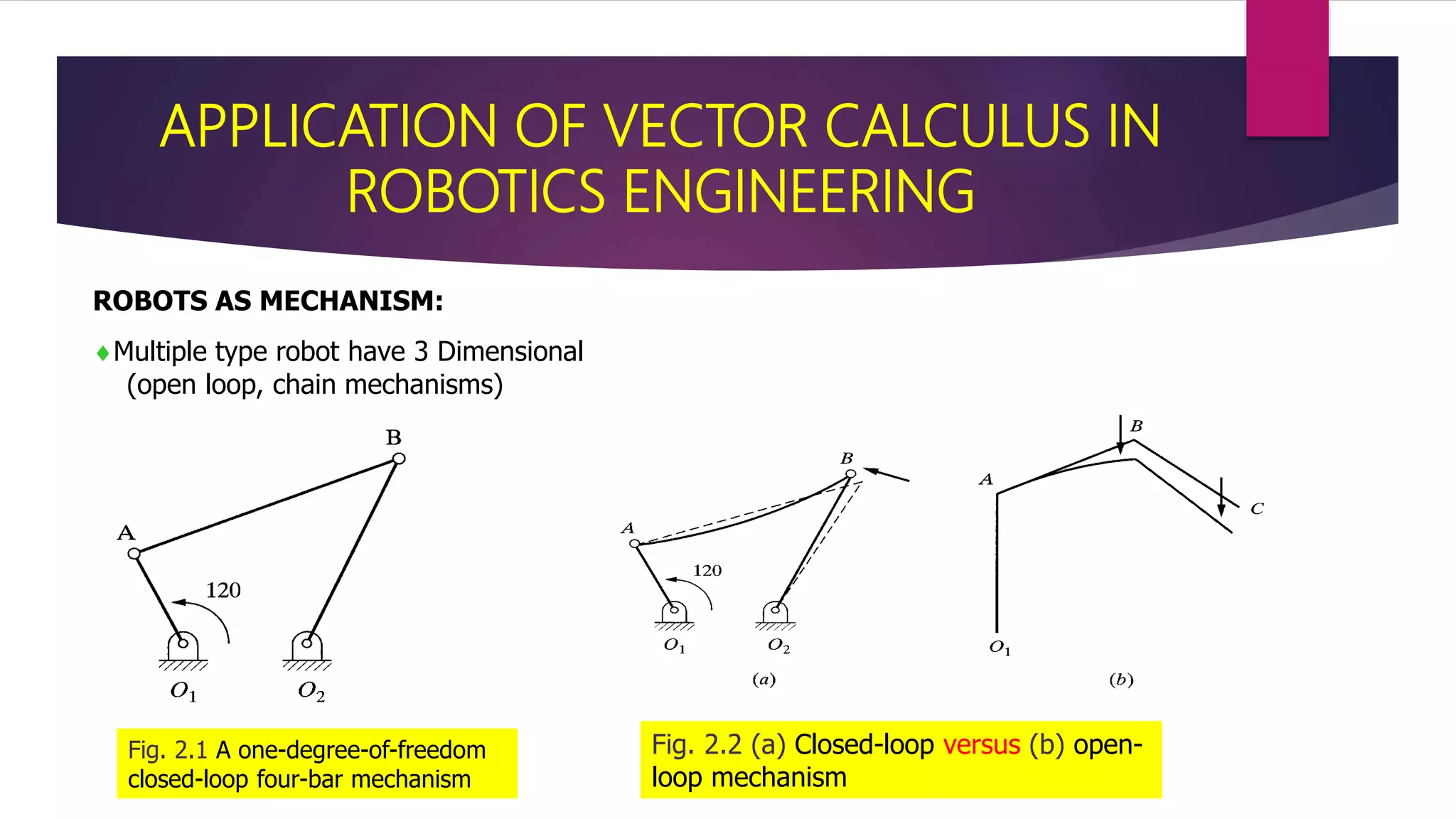
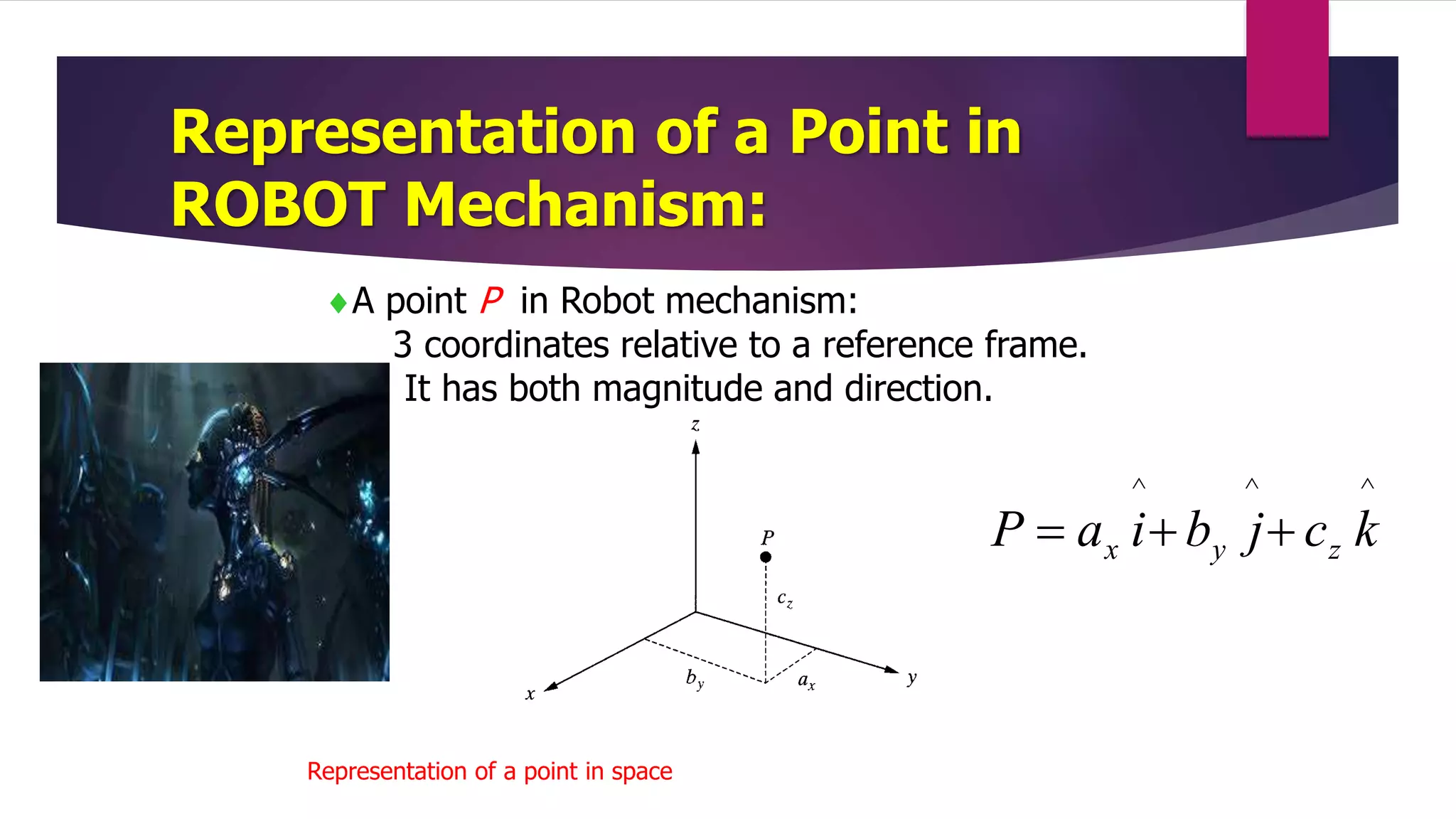
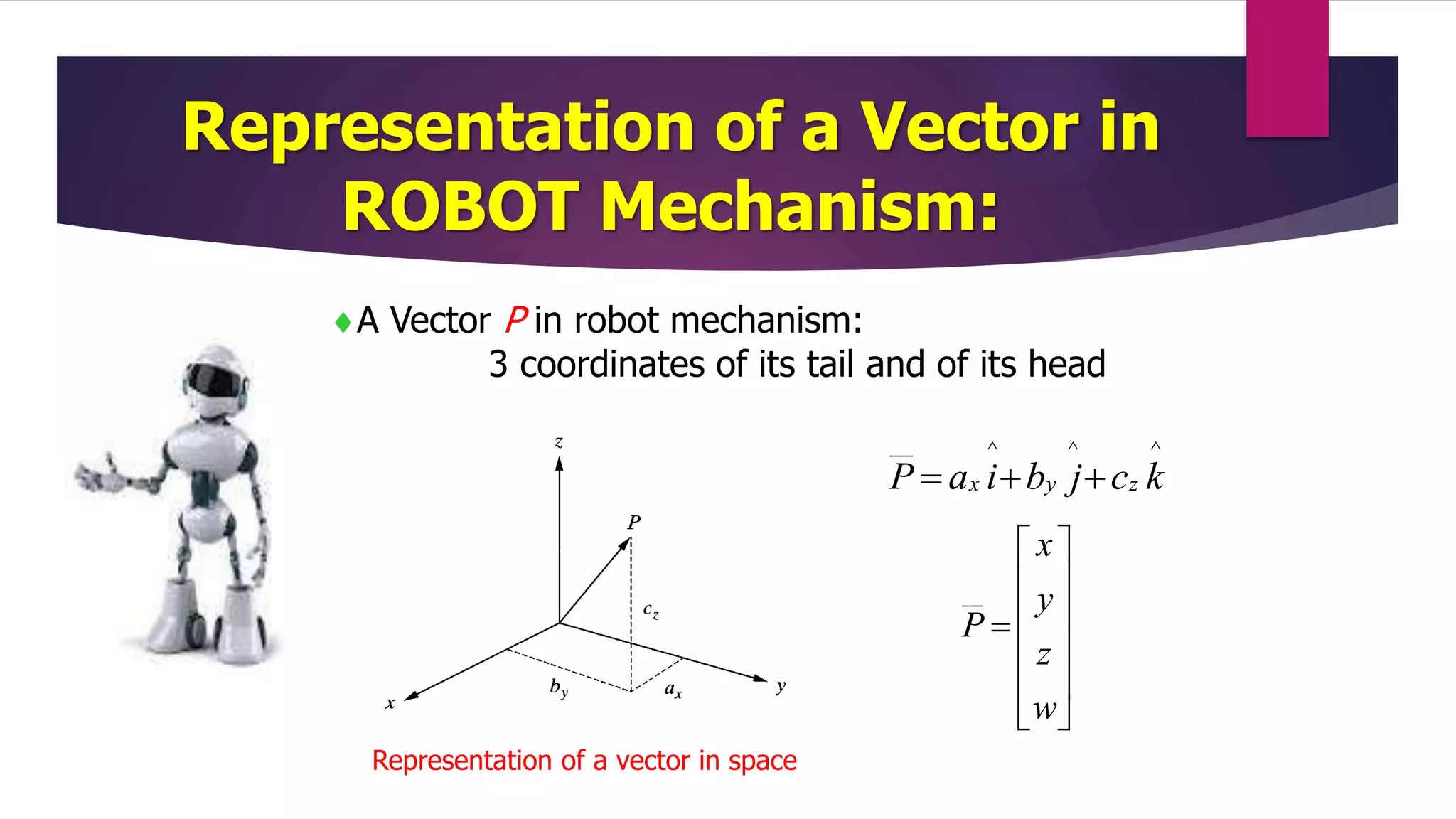
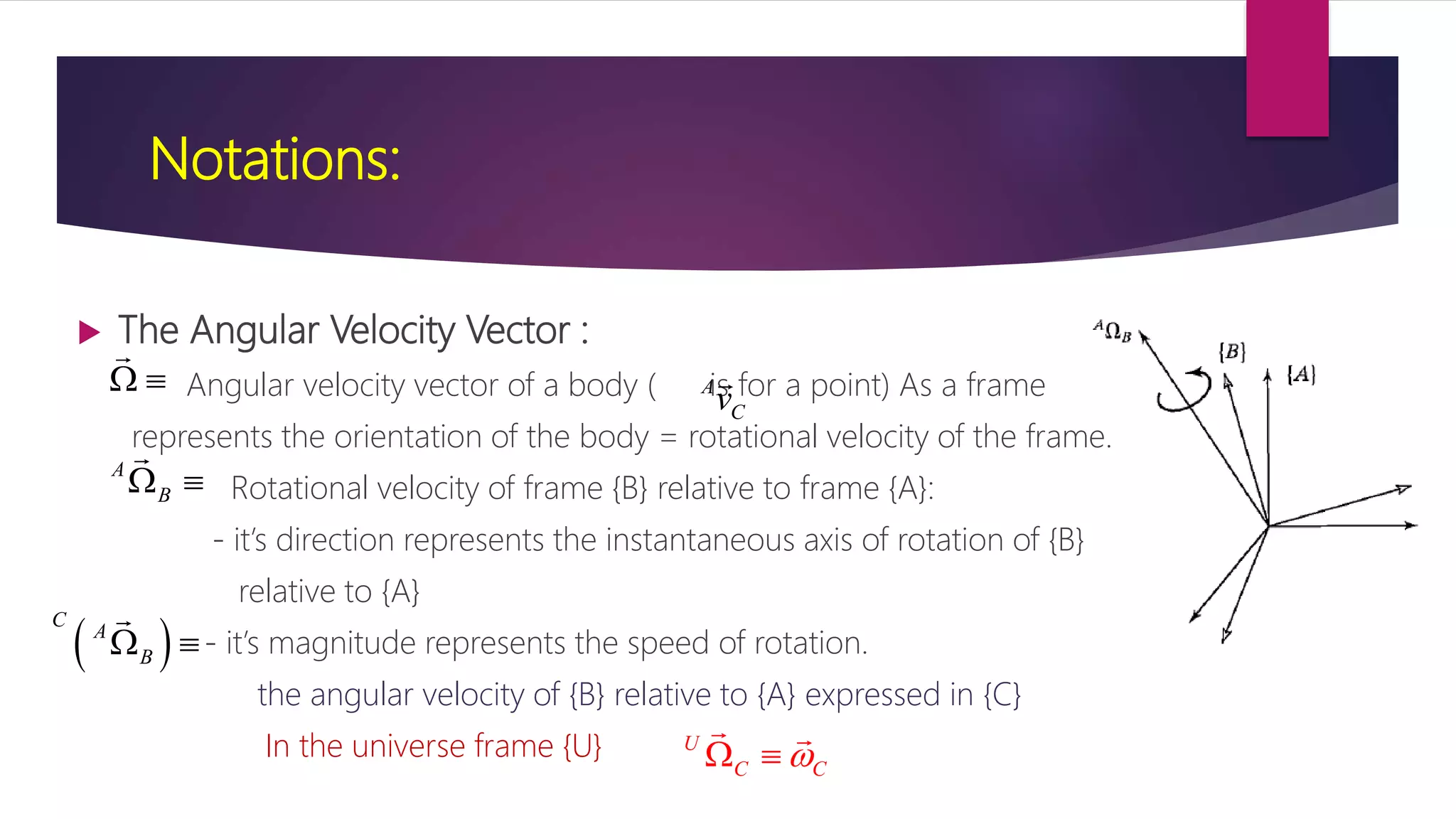
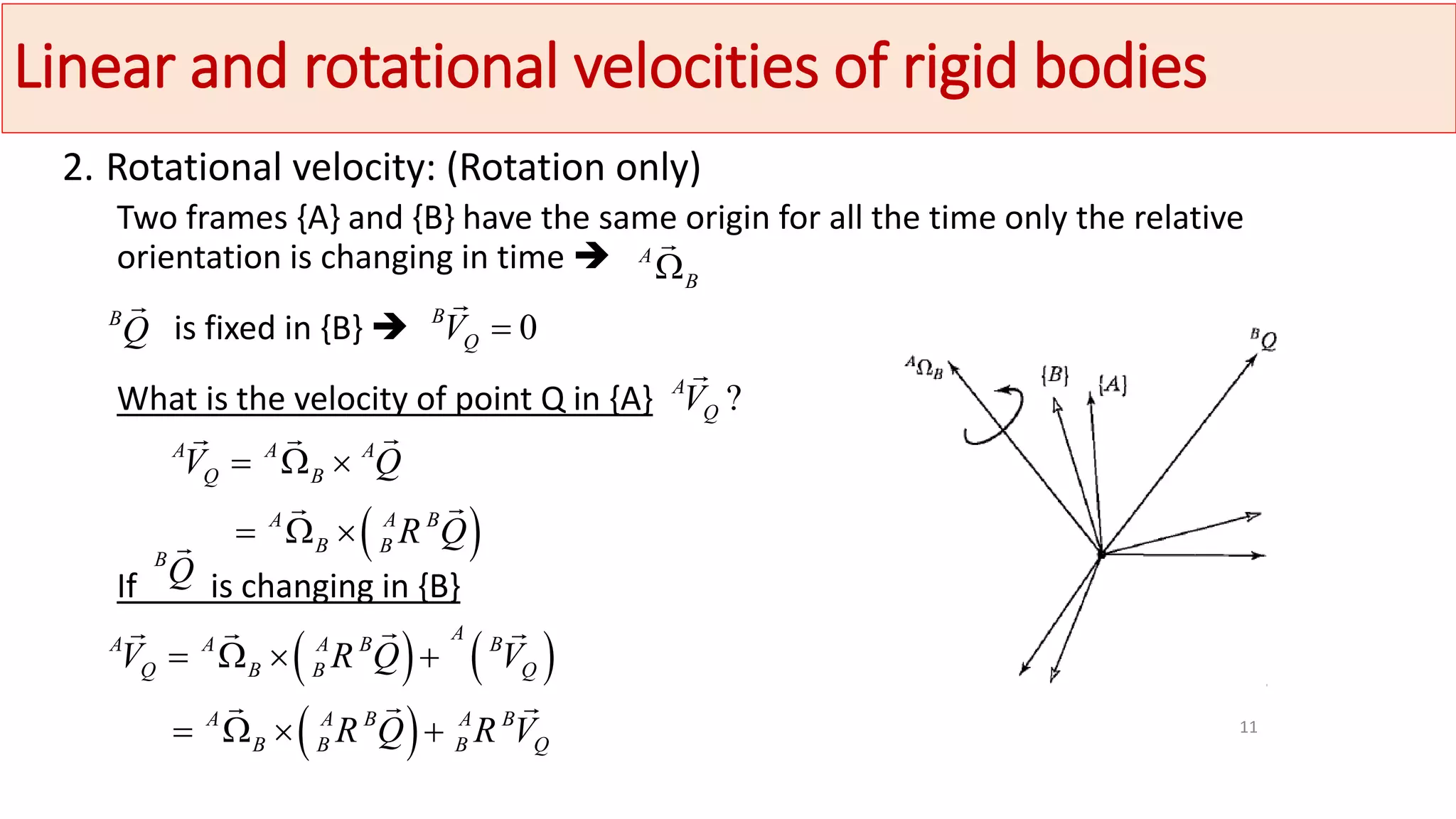
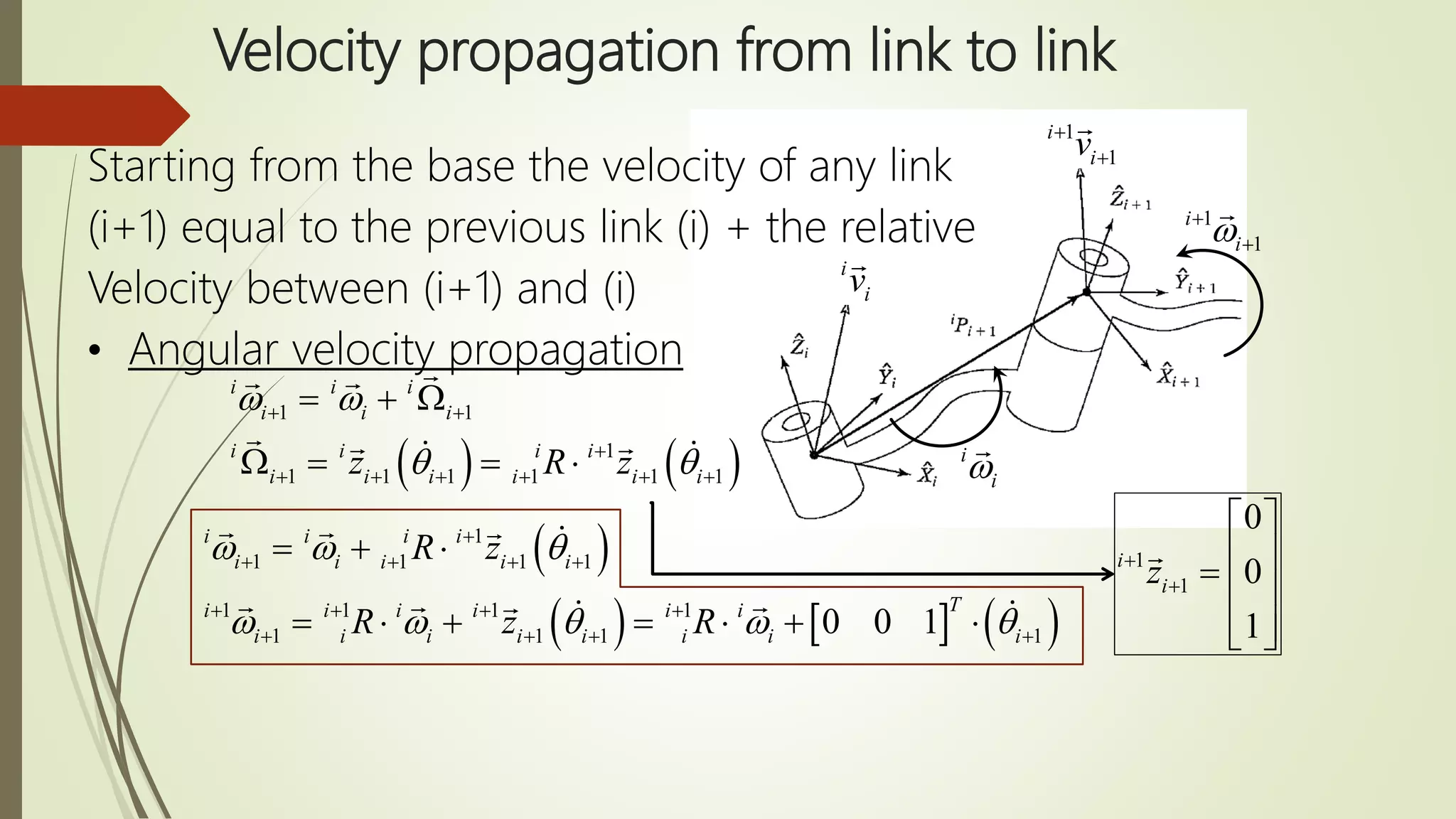
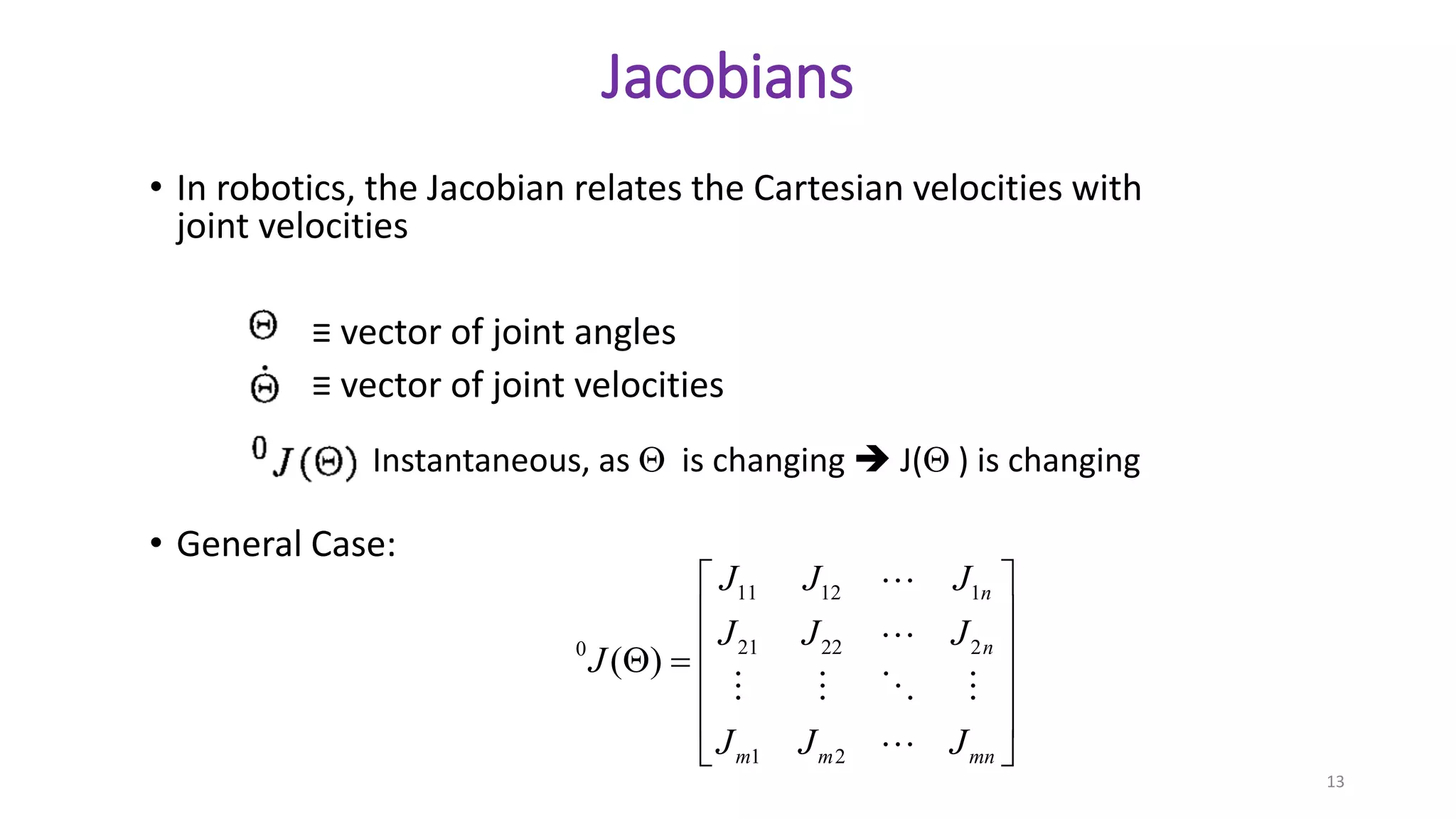
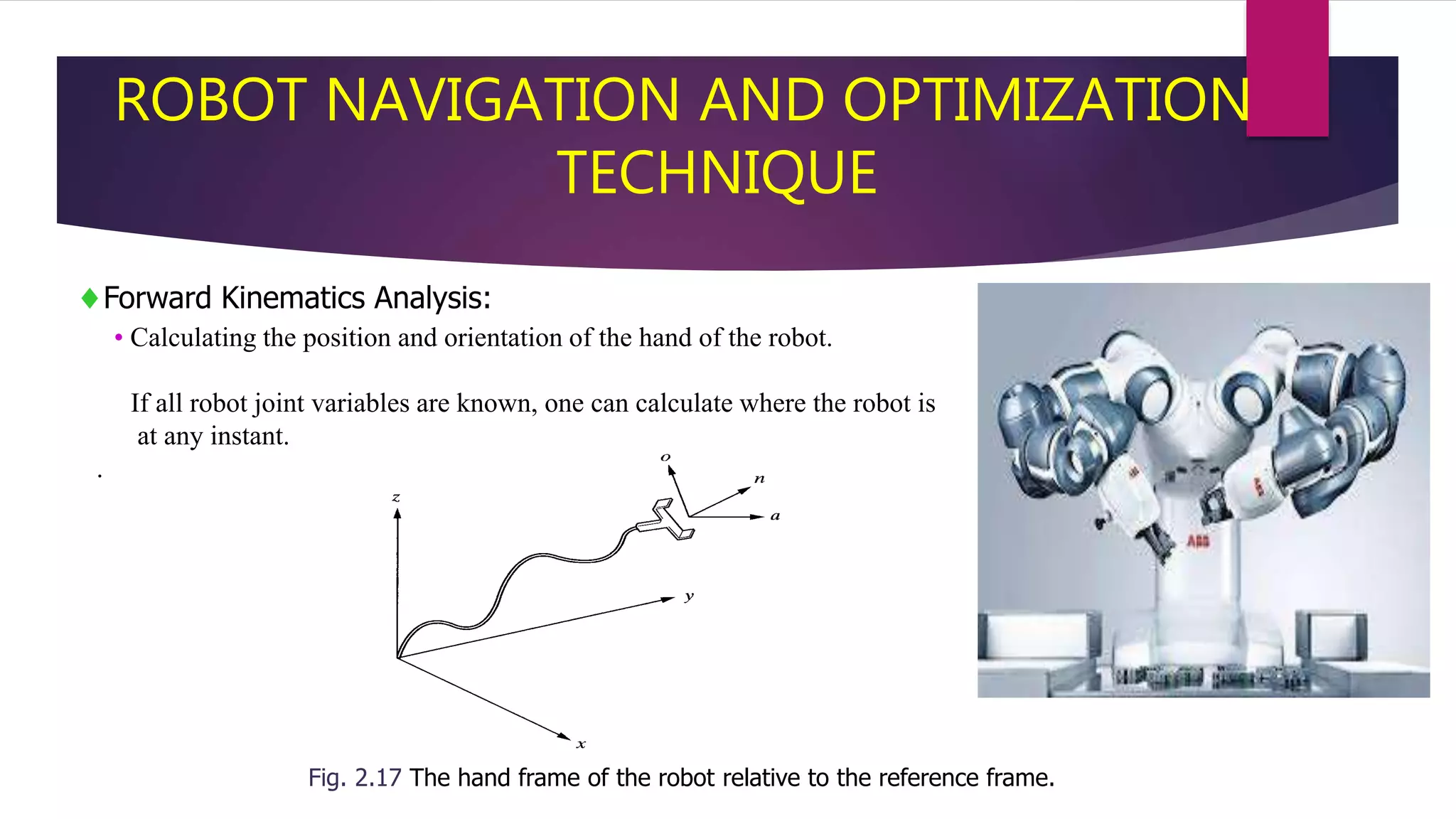
Vector calculus concepts such as angular velocity vectors, linear and rotational velocities, and Jacobians are important applications in robotics engineering. Vector calculus is used to represent points and vectors in robotic mechanisms with three coordinates and their magnitudes and directions. It allows determining the velocity of parts in a robot by propagating velocities between links using rotational and angular velocities. Jacobians relate Cartesian velocities to joint velocities in robots and are used for forward and inverse kinematics analysis to calculate robot positions and orientations.







![[Doc] Introduction to Robotics: Mechanics and Control (4th Edition)](https://cdn.slidesharecdn.com/ss_thumbnails/introductiontoroboticsmechanicsandcontrol4thedition-johnj-181130182737-thumbnail.jpg?width=640&height=640&fit=bounds)