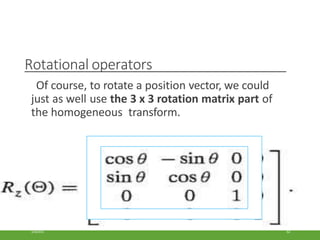
Downloaded 17 times
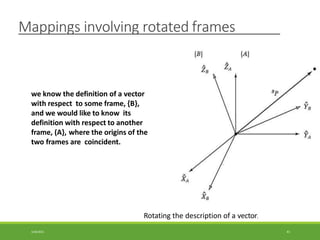
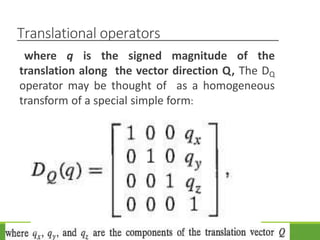
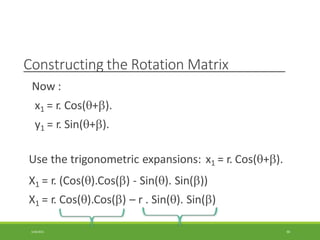
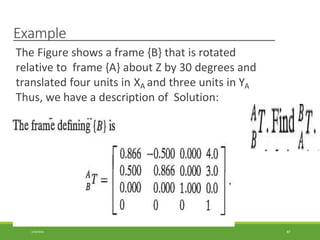
![EXAMPLE 2
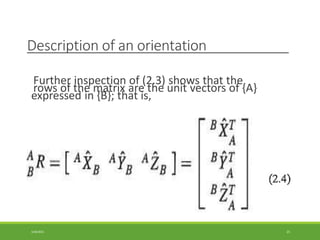
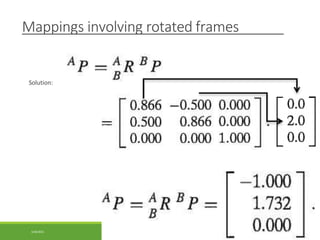
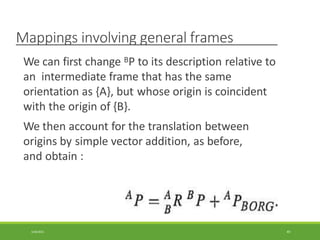
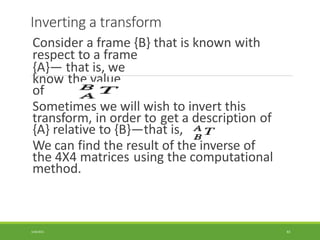
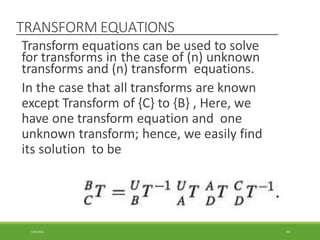
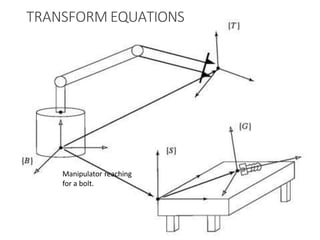
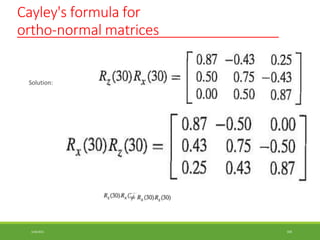
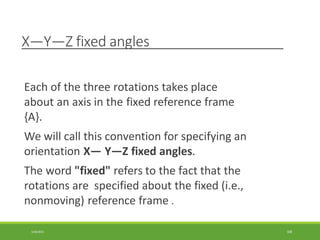
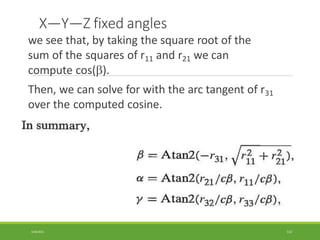
Figure shows a frame {B}, which is rotated relative
to frame {A} about Z by 30 degrees, translated
10 units in XA, and translated 5 units in YA . Find Ap,
where Bp = [3 7 0]T and
3/28/2021 51](https://image.slidesharecdn.com/chapter2ofrobotics-220425215654/85/CHAPTER-2-of-robotics-pptx-51-320.jpg)
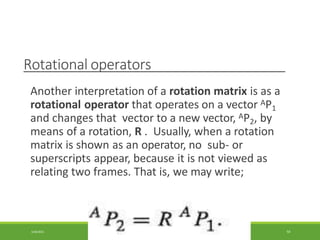
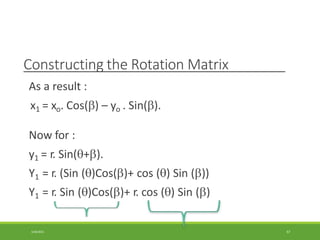
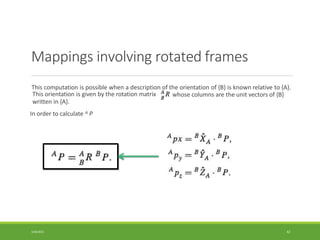
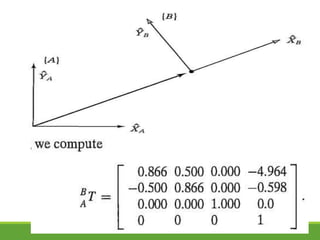
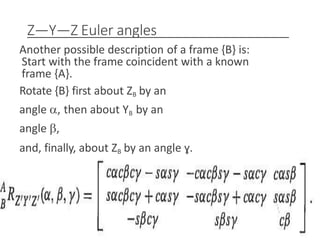
![EXAMPLE
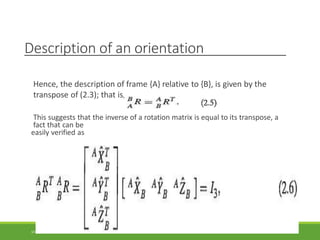
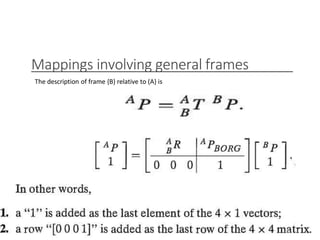
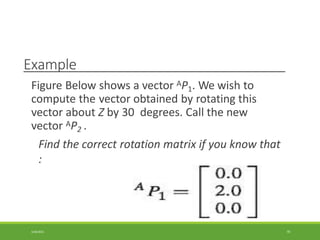
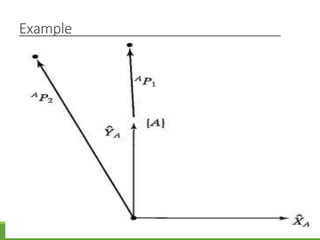
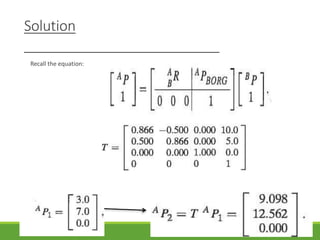
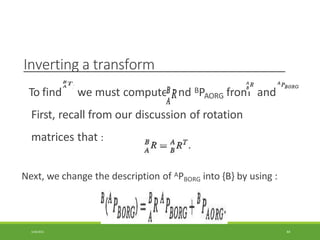
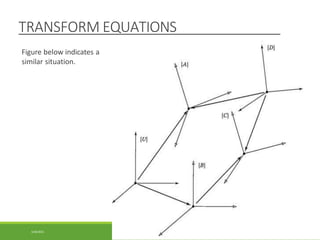
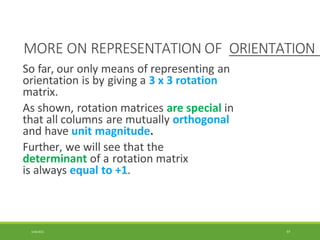
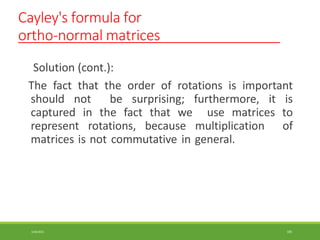
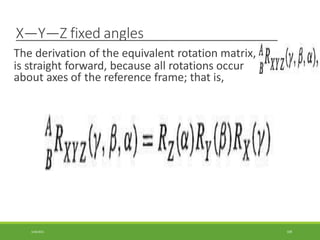
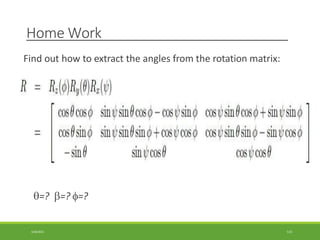
Figure shows a vector AP1.
We wish to rotate it about Z
by 30 degrees and translate
it 10 units in XA and 5 units
in YA .
Find Ap2 where :
Ap1 = [3 7 0] T
3/28/2021 76](https://image.slidesharecdn.com/chapter2ofrobotics-220425215654/85/CHAPTER-2-of-robotics-pptx-76-320.jpg)


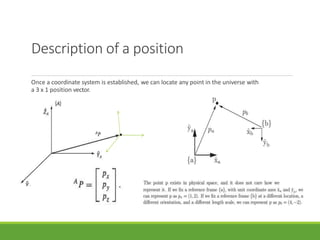
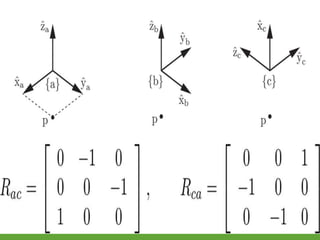
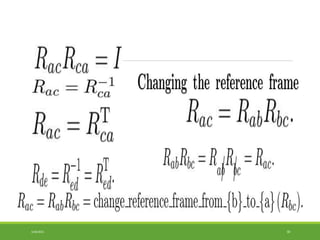
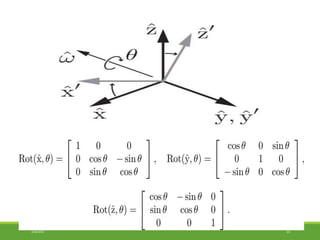
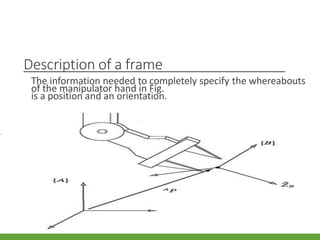
The document discusses spatial descriptions and transformations in robotics. It begins by introducing coordinate systems and conventions for representing position and orientation. Descriptions of position are given by position vectors, while orientations are described using rotation matrices composed of unit vectors. Mappings between coordinate systems are also discussed, including general transformations between frames related by both translation and rotation. Operators for translating and rotating vectors are introduced, along with methods for constructing rotation matrices.























































































