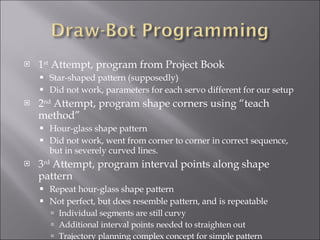
This document provides an introduction to robotics concepts including defining a robot, discussing robotics as a field, and describing an educational robotics project. It outlines the key phases of the project which involved kinematic and dynamic analysis of the robot arm, generating equations of motion, and trajectory planning. Students constructed a simple robot arm and attempted to program it to draw patterns but encountered challenges achieving straight lines with their programming.



![Students were to use the Denavit-Hartenberg model representation to form the Equations of Motion Total Transformation Matrix: R T H = R T 1 1 T 2 2 T 3 = A 1 A 2 A 3 Each A Matrix represents the transformation between each joint, from one frame of reference to the next. Equations of Motion: n z =C 3 S 2 θ 1 = tan -1 (o y /o x ) and θ 1 = θ 1 +180˚ o z =C 2 θ 2 = tan -1 (p z /[p x C 1 +p y S 1 -a 1 ]) a z =S 2 S 3](https://image.slidesharecdn.com/drawbotfinalpres-124164504534-phpapp02/85/Drawbot-Final-Presentation-8-320.jpg)




















![Internet Of Things (November – 2018) [Choice Based | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/iot-cbcs-nov-2018-qp-191111054925-thumbnail.jpg?width=640&height=640&fit=bounds)
![Internet Of Things (Question Paper) [October – 2018 | Choice Based Syllabus]](https://cdn.slidesharecdn.com/ss_thumbnails/iot-oct-2018-181112024446-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [April ...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcourseapr-2015-170713044202-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [Octobe...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcourseoct-2016-170713044200-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [Septem...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcoursesep-2013-170713044201-thumbnail.jpg?width=640&height=640&fit=bounds)




![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [June /...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcoursejun-2014-170713050810-thumbnail.jpg?width=640&height=640&fit=bounds)








































