Downloaded 27 times

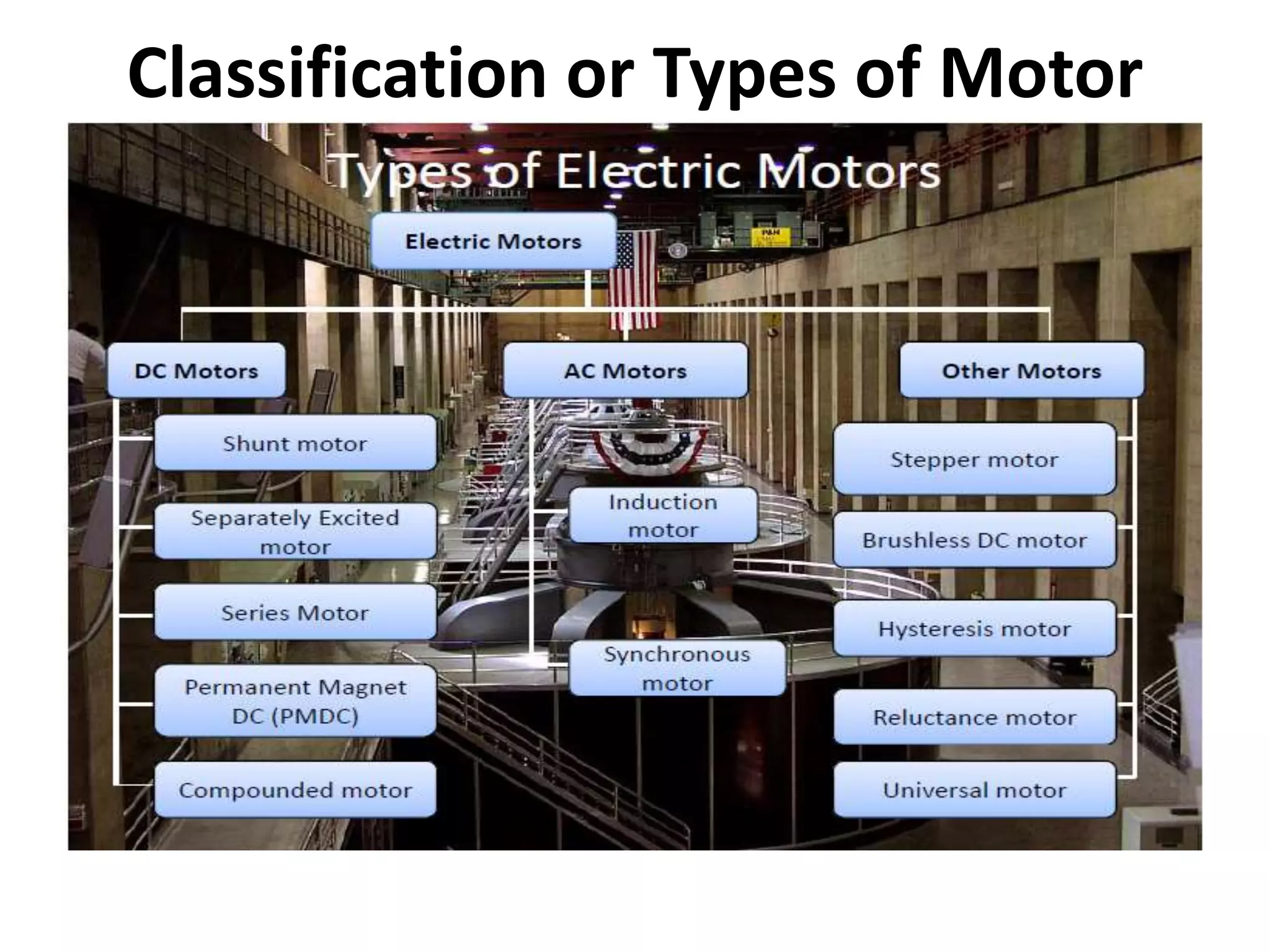




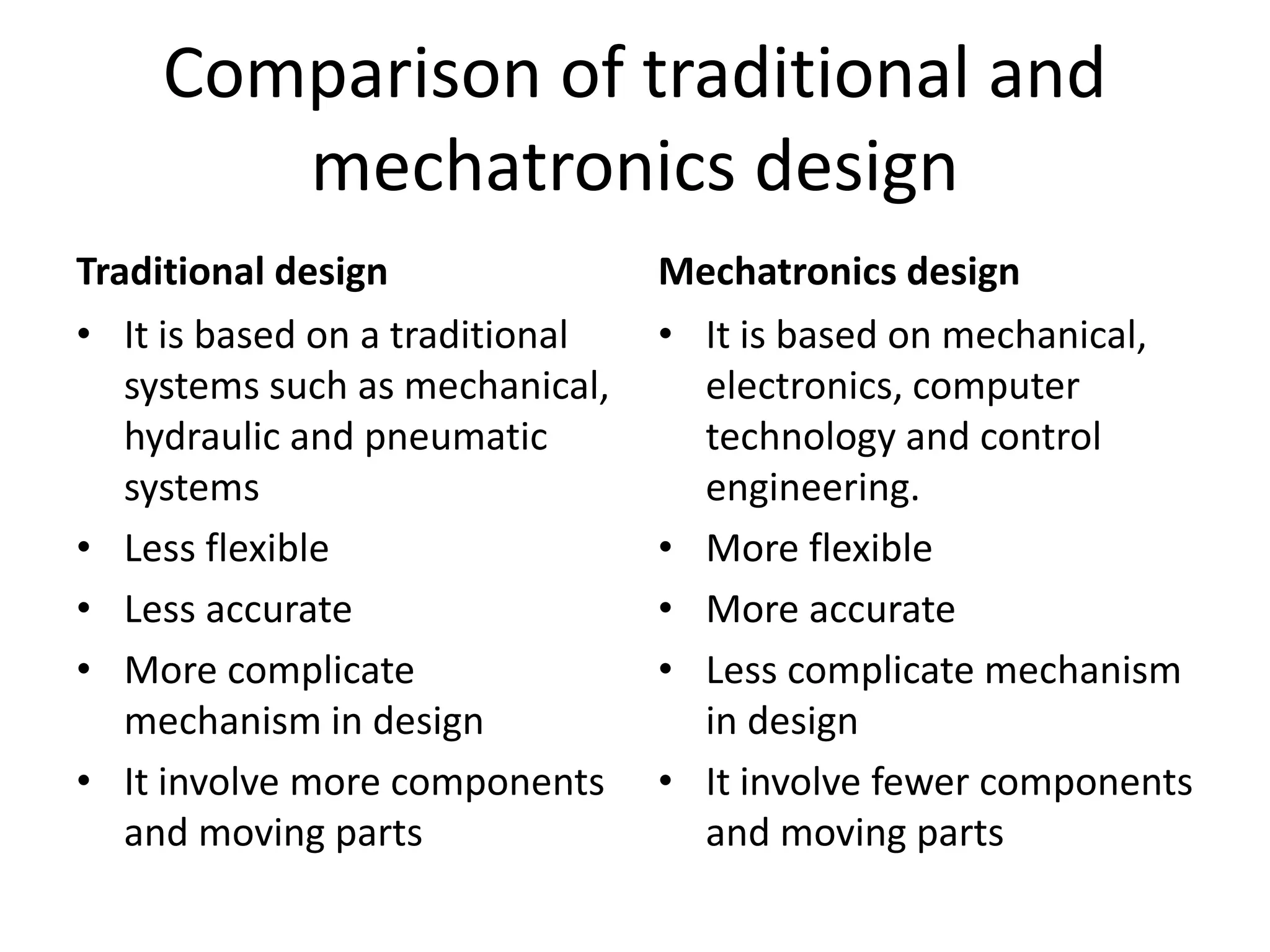




















The document discusses mechatronics systems design and provides examples. It defines a motor as an electro-mechanical device that converts electrical to mechanical energy. The document then discusses types of stepper and servo motors, the stages in designing mechatronics systems including need identification, analysis, specification generation, solution evaluation, and implementation. It compares traditional designs using mechanical and hydraulic/pneumatic components to mechatronic designs that integrate electronics, computing, and control systems. Case studies of pick and place robots, engine management systems, and automatic car park barriers are provided to illustrate mechatronics design solutions and system components.























































































